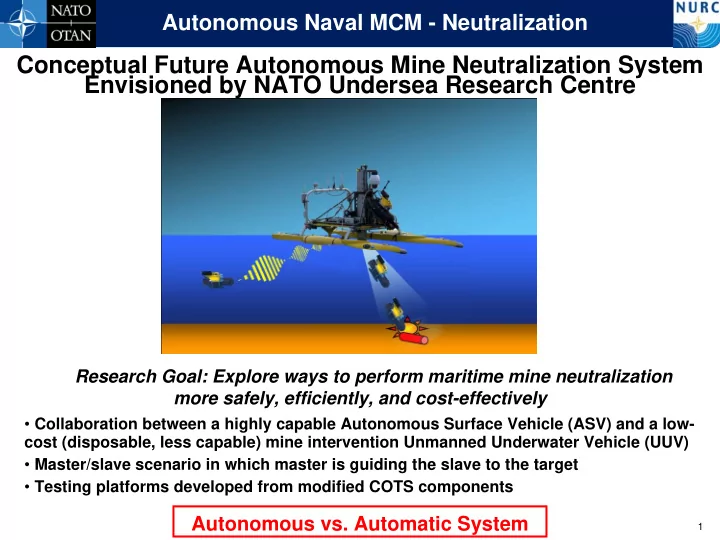
Autonomous Naval MCM - Neutralization Conceptual Future Autonomous Mine Neutralization System Envisioned by NATO Undersea Research Centre Research Goal: Explore ways to perform maritime mine neutralization more safely, efficiently, and cost-effectively • Collaboration between a highly capable Autonomous Surface Vehicle (ASV) and a low- cost (disposable, less capable) mine intervention Unmanned Underwater Vehicle (UUV) • Master/slave scenario in which master is guiding the slave to the target • Testing platforms developed from modified COTS components Autonomous vs. Automatic System 1
Autonomous Naval MCM - Neutralization Modified SeaRobotics Catamaran ASV • SeaRobotics USV-2600 4-meter catamaran • Two electric trolling motors provide differential thrust • DGPS, attitude sensors, compass, yaw rate sensor for navigation • NURC added: imaging sonar, acoustic modem, underwater pan & tilt unit, variable depth system for sonar, and release mechanism for UUV 2
Autonomous Naval MCM - Neutralization Modified Video Ray Pro 4 ROV • Video Ray Pro 4 ROV equipped with two horizontal thrusters and one vertical thruster; on-board compass and depth sensor utilized in navigation • NURC added WLAN, GPS tracker, acoustic modem, and underwater aBox pressure vessel (for untethered operation) • University of Zagreb (UoZ) created control and navigation algorithms • NURC and UoZ created acoustic command interface between the ASV and the UUV • UoZ control software compensates for significant changes in the UUV dynamics • NURC designed algorithms and system concepts for mine neutralization phase operations 3
Autonomous Naval MCM - Neutralization Blue View P450/P900 Multibeam Imaging Sonar on P&T Unit • BlueView imaging sonar integrated to run with SIDUS or ROS pan and tilt units • BlueView Software Development Kit (SDK) used to acquire sonar data, imagery processed in real time for object tracking (bottom target and moving UUV for external guidance, UoZ-developed algorithms) • NURC-developed behaviors allow the ability to keep an object in the field-of-view of the sonar by combining pan & tilt unit and ASV control strategies 4
Autonomous Naval MCM - Neutralization MOOS-IvP Helm Autonomy System Software Architecture • Mission Orientated Operating Suite (MOOS) and IvP Helm used for behavior-based planning and control • New GUIs programmed to allow operator control of the mission and to allow real-time sonar data visualization • Devices added to the ASV use MOOS for inter-process communications • MOOS used in prototype system to pass UUV tracks from imaging sonar, to direct the USV to change its trajectory, and to point the sonar in the appropriate direction 5
Autonomous Naval MCM - Neutralization Conceptual Autonomous Mine Neutralization System • Autonomous Surface Vehicle carrying and guiding an automated ROV close to the mine target utilizing advances in sonar image processing and target tracking, autonomous navigation and control, and collaborative autonomous systems mission planning • Modified COTS equipment used to test new concepts inexpensively • Contact: Dr. Vladimir Djapic, djapic@nurc.nato.int, +39-0187-527-284 6
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries