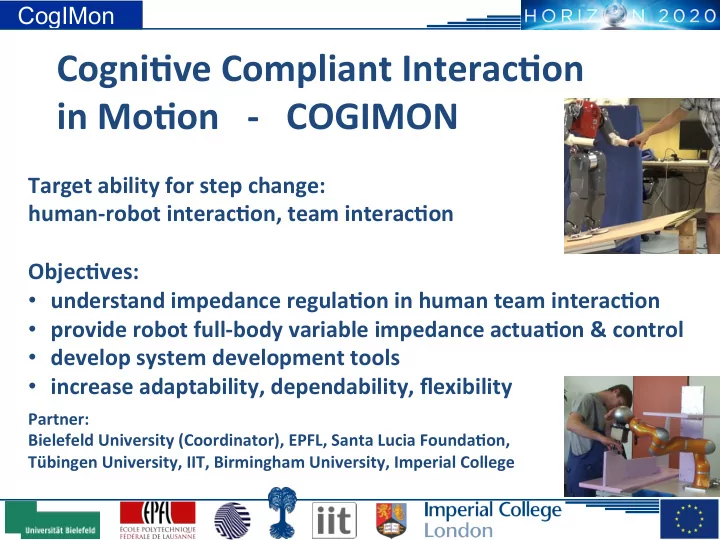
CogIMon Cogni&ve ¡Compliant ¡Interac&on ¡ in ¡Mo&on ¡ ¡ ¡-‑ ¡ ¡ ¡COGIMON ¡ Target ¡ability ¡for ¡step ¡change: ¡ ¡ ¡ human-‑robot ¡interac&on, ¡team ¡interac&on ¡ ¡ ¡ Objec&ves: ¡ • understand ¡impedance ¡regula&on ¡in ¡human ¡team ¡interac&on ¡ • provide ¡robot ¡full-‑body ¡variable ¡impedance ¡actua&on ¡& ¡control ¡ • develop ¡system ¡development ¡tools ¡ ¡ • increase ¡adaptability, ¡dependability, ¡flexibility ¡ ¡ ¡ Partner: ¡ ¡ Bielefeld ¡University ¡(Coordinator), ¡EPFL, ¡Santa ¡Lucia ¡Founda&on, ¡ Tübingen ¡University, ¡IIT, ¡Birmingham ¡University, ¡Imperial ¡College ¡ ¡
CogIMon Scien&fic ¡goals ¡ ¡(step ¡changes): ¡
CogIMon Scenario roadmap Human-robot Multi Multi-arm simplified skills in full model based therapeutic Coman-Human compliant engineered scenario juggling interaction handling impedance control in compliant interaction stepping for catching smooth change code generation for of contact compliant interaction Full body Locomotion Safety-integrated compliant in modeling throwing & compliant of compliant catching contact interaction joint skills & capabilities : force primitives, prediction from human motion, control and adaptation in contact situation, contact switching
CogIMon What ¡are ¡the ¡main ¡AICo ¡techniques ¡used ¡in ¡your ¡project?* ¡ ¡ ¡ Machine ¡Learning ¡Techniques: ¡ • Imi&ta&on ¡Learning ¡for ¡(Force, ¡Impedence, ¡Compliance) ¡ ¡ Mo&on ¡Primi&ves ¡ • unsupervised ¡Clustering ¡ • Policy ¡Op&miza&on ¡ • Gaussian ¡Mixture ¡Models ¡(movements, ¡self-‑collision, ¡modeling) ¡ • CMA-‑ES ¡& ¡Reinforcement ¡Learning ¡ • various ¡regression ¡and ¡predic&on ¡techniques ¡ • data ¡analysis ¡ ¡ ¡ • visual ¡percep&on ¡ * ¡ The ¡following ¡answers ¡reflect ¡the ¡coordinator‘s ¡personal ¡view ¡(J. ¡Steil), ¡not ¡necessarily ¡the ¡all ¡opinions ¡in ¡the ¡consor&um ¡
CogIMon What ¡are ¡the ¡main ¡technological ¡challenges ¡in ¡ your ¡project ¡that ¡these ¡AICo ¡techniques ¡are ¡meant ¡ to ¡address? ¡ ¡ ¡ Objec&ves: ¡ • understand ¡impedance ¡regula&on ¡ ¡ • provide ¡robot ¡full-‑body ¡variable ¡impedance ¡actua&on ¡& ¡control ¡ • provide ¡impedance-‑based ¡skills ¡ • increase ¡adaptability, ¡dependability, ¡flexibility ¡ ¡ Examples: ¡ ¡ so\ ¡catching ¡& ¡throwing ¡ • task-‑adpata&on ¡in ¡computed ¡torque ¡control ¡ ¡ • predic&on ¡of ¡dynamic ¡parameters ¡from ¡kinema&cs ¡ • in ¡all ¡scenarios: ¡fast, ¡online ¡adapta&on ¡in ¡the ¡real ¡world ¡ •
CogIMon ¡ Have ¡you ¡found ¡these ¡techniques ¡mature ¡enough ¡to ¡use ¡ in ¡a ¡robo&c ¡system? ¡ ¡ Yes. ¡We ¡have ¡developed ¡many ¡of ¡these ¡methods. ¡ ¡ But ¡we ¡will ¡see ¡... ¡ ¡ What ¡is ¡missing ¡? ¡ integra&on ¡in ¡full ¡systems, ¡mul&-‑level ¡learning, ¡ ¡ cogni&on ¡on ¡system ¡level ¡(e.g. ¡a_en&on, ¡memory, ¡delibera&on, ¡...) ¡ ¡
CogIMon Have ¡you ¡found ¡that ¡these ¡techniques ¡add ¡value ¡to ¡your ¡ project ¡or ¡product? ¡More ¡or ¡less ¡than ¡you ¡expected? ¡Why? ¡ ¡ Not ¡applicable. ¡ ¡ ¡ All ¡partners ¡have ¡been ¡developing ¡and ¡working ¡with ¡learning ¡ Methods ¡for ¡a ¡long ¡&me ¡... ¡ ¡ My ¡general ¡remark: ¡ ¡ There ¡is ¡hardly ¡serious ¡research ¡towards ¡the ¡real ¡world ¡ ¡ without ¡substan&al ¡involvement ¡of ¡machine ¡learning ¡any ¡more ¡... ¡ ¡
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries