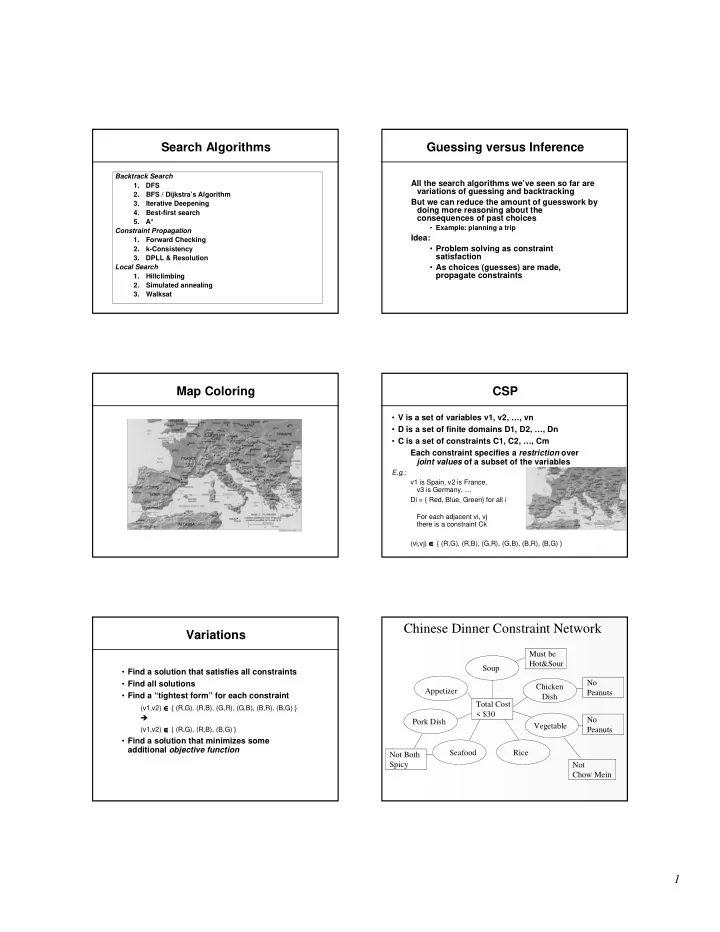
Chinese Dinner Constraint Network Variations Must be Hot&Sour - PDF document
Search Algorithms Guessing versus Inference Backtrack Search All the search algorithms weve seen so far are 1. DFS variations of guessing and backtracking 2. BFS / Dijkstras Algorithm But we can reduce the amount of guesswork by 3.
Search Algorithms Guessing versus Inference Backtrack Search All the search algorithms we’ve seen so far are 1. DFS variations of guessing and backtracking 2. BFS / Dijkstra’s Algorithm But we can reduce the amount of guesswork by 3. Iterative Deepening doing more reasoning about the 4. Best-first search consequences of past choices 5. A* • Example: planning a trip Constraint Propagation Idea: 1. Forward Checking • Problem solving as constraint 2. k-Consistency satisfaction 3. DPLL & Resolution Local Search • As choices (guesses) are made, propagate constraints 1. Hillclimbing 2. Simulated annealing 3. Walksat Map Coloring CSP • V is a set of variables v1, v2, …, vn • D is a set of finite domains D1, D2, …, Dn • C is a set of constraints C1, C2, …, Cm Each constraint specifies a restriction over joint values of a subset of the variables E.g.: v1 is Spain, v2 is France, v3 is Germany, … Di = { Red, Blue, Green} for all i For each adjacent vi, vj there is a constraint Ck (vi,vj) ∈ ∈ ∈ ∈ { (R,G), (R,B), (G,R), (G,B), (B,R), (B,G) } Chinese Dinner Constraint Network Variations Must be Hot&Sour Soup • Find a solution that satisfies all constraints No • Find all solutions Chicken Appetizer Peanuts • Find a “tightest form” for each constraint Dish Total Cost (v1,v2) ∈ ∈ { (R,G), (R,B), (G,R), (G,B), (B,R), (B,G) } ∈ ∈ < $30 ! No Pork Dish Vegetable (v1,v2) ∈ ∈ { (R,G), (R,B), (B,G) } ∈ ∈ Peanuts • Find a solution that minimizes some additional objective function Seafood Rice Not Both Spicy Not Chow Mein 1
Exploiting CSP Structure Running Example: 4 Queens Interleave inference and guessing Constraints: Variables: • At each internal node: • Select unassigned variable Q1 Q2 Q1 ∈ ∈ ∈ ∈ {1,2,3,4} Q • Select a value in domain 1 3 Q2 ∈ ∈ ∈ ∈ {1,2,3,4} Q • Backtracking: try another value Q3 ∈ ∈ {1,2,3,4} ∈ ∈ Q 1 4 – Branching factor? Q3 ∈ ∈ ∈ ∈ {1,2,3,4} Q 2 4 • At each node: 3 1 • Propagate Constraints 4 1 4 2 Constraint Checking Forward Checking x x x x When variable is set, immediately remove Q Q x x Q x x inconsistent values from x x x x x x x domains of other variables Q Q x Q x x Q x x x Q x x x Q Q Q x Q x x Q x x x x x x x x x x x x x Q x Q x x x x Q x Q x Q x x Q x x x Q x x x Q x x x Takes 5 guesses to determine first guess was wrong Takes 3 guesses to determine first guess was wrong Huffman-Clowes Arc Consistency Labeling x x x x x x x x x x x x x x x x Q x x x Q x x x Q x x Q x x + - + + + Iterate forward checking + + Propagations: Q3=3 inconsistent with Q4 ∈ ∈ {2,3,4} 1. ∈ ∈ Q2=1 and Q2=2 inconsistent with Q3 ∈ ∈ ∈ ∈ {1} 2. Inference alone determines first guess was wrong! 2
Waltz’s Filtering: Arc- No labeling! Consistency • Lines: variables • Conjunctions: constraints • Initially Di = {+,-, " " " , # " # # ) # • Repeat until no changes: Choose edge (variable) Delete labels on edge not consistent with both endpoints Path Consistency Variable and Value Selection Path consistency (3-consistency): • Select variable with smallest domain • Check every triple of variables – Minimize branching factor – Most likely to propagate: most constrained variable • More expensive! heuristic • k-consistency: • Which values to try first? k | V | k-tuples to check – Most likely value for solution – Least propagation! Least constrained value Worst case: each iteration eliminates 1 choice • Why different? | D V || | iterations – Every constraint must be eventually satisfied + 1 k – Not every value must be assigned to a variable! | D V || | steps! (But usually not this bad) • Tie breaking? – In general randomized tie breaking best – less likely to • n -consistency: backtrack-free search get stuck on same bad pattern of choices Quasigroup Completion CSPs in the real world Problem (QCP) Given a partial assignment of colors (10 colors in this case), can the partial quasigroup (latin square) • Scheduling Space Shuttle Repair be completed so we obtain a full quasigroup? • Transportation Planning • Computer Configuration Example: – AT&T CLASSIC Configurator • #5ESS Switching System • Configuring new orders: 2 months # 2 hours 32% preassignment (Gomes & Selman 97) CPGomes - AAAI00 3
QCP Example Use: Routers in QCP as a CSP Fiber Optic Networks 2 ( n ) Dynamic wavelength routing in Fiber Optic Networks can be O • Variables - directly mapped into the Quasigroup Completion Problem. , ; , = 1 , 2 , ..., . x color of cell i j i j n , i j • each channel cannot be repeated in the same input port (row constraints); ∈ { 1 , 2 , ..., } x n i , j • each channel cannot be repeated in the same output port (column constraints); O ( n ) • Constraints - Output ports Input Port Output Port ( , ,..., ); = 1 , 2 , ..., . row alldiff x x x i n 1 1 Input ports , 1 , 2 i , n i i 2 2 3 3 column alldiff ( x , x ,..., x ); j = 1 , 2 , ..., n . 4 4 1 , 2 , n , j j j CONFLICT FREE LATIN ROUTER (Barry and Humblet 93, Cheung et al. 90, Green 92, Kumar et al. 99) CPGomes - AAAI00 CPGomes - AAAI00 Hill Climbing Simulated Annealing / Random Walk • Objective: avoid local minima • Technique: • Idea – For the most part use hill climbing – Always choose best child, no backtracking – Occasionally take non-optimal step • Evaluation – Annealing: Reduce probability (non-optimal) over time – Complete? • Comparison to Hill Climbing – Completeness? – Speed? – Space Complexity? – Complexity of random restart hillclimbing, with success – Space Complexity? Temperature probability P Objective Time # # # # Backtracking with Randomized Demos! Restarts • Idea: • N-Queens – If backtracking algorithm does not find solution quickly, Backtracking vs. Local Search it is like to be stuck in the wrong part of the search space • Quasigroup Completion • Early decisions were bad! Randomized Restarts – So kill the run after T seconds, and restart • Travelling Salesman • Requires randomized heuristic, so choices not always the same – Why does it often work? Simulated Annealing • Many problems have a small set of “backdoor” variables – guess them on a restart, and your are done! (Andrew, Selman, Gomes 2003) – Completeness? 4
Planning as CSP Exercise • Phase 1 - Convert planning problem in a CSP Peer interviews: Real-world constraint • Choose a fixed plan length satisfaction problems • Boolean variables 1. Break into pairs – Action executed at a specific time point 2. 7 minute interview – example of needing to – Proposition holds at a specific time point solve a CSP type problem (work or life). Interviewer takes notes: • Constraints • Describe problem – Initial conditions true in first state, goals true in final state • What techniques actually used – Actions do not interfere • Any techniques from class that could have been used? – Relation between action, preconditions, effects 3. Switch roles • Phase 2 - Solution Extraction 4. A few teams present now • Solve the CSP 5. Hand in notes (MSR – have someone collect and mail to me at dept) Planning Graph Representation of CSP Constructing the planning graph… Precondition Effect constraints constraints • Initial proposition layer – Just the initial conditions • Action layer i – If all of an action’s preconditionss are in i-1 – Then add action to layer I • Proposition layer i+1 – For each action at layer i – Add all its effects at layer i+1 Proposition Action Proposition Action Init State Time 1 Time 1 Time 2 27 Mutual Exclusion Solution Extraction • For each goal G at last time slice N: • Actions A,B exclusive (at a level) if • Solve( G, N ) – A deletes B’s precondition, or – B deletes A’s precondition, or • Solve( G, t ): – A & B have inconsistent preconditions CHOOSE action A making G true @t that is not • Propositions P,Q inconsistent (at a level) if mutex with a previously chosen action – All ways to achieve P exclude all ways to achieve Q If no such action, backtrack to last choice point • Constraint propagation (arc consistency) For each precondition P of A: – Can force variables to become true or false Solve(P, t-1) – Can create new mutexes 29 30 5
Recommend















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.