Cell Decomposition Methods free space s obstacle free path - PowerPoint PPT Presentation
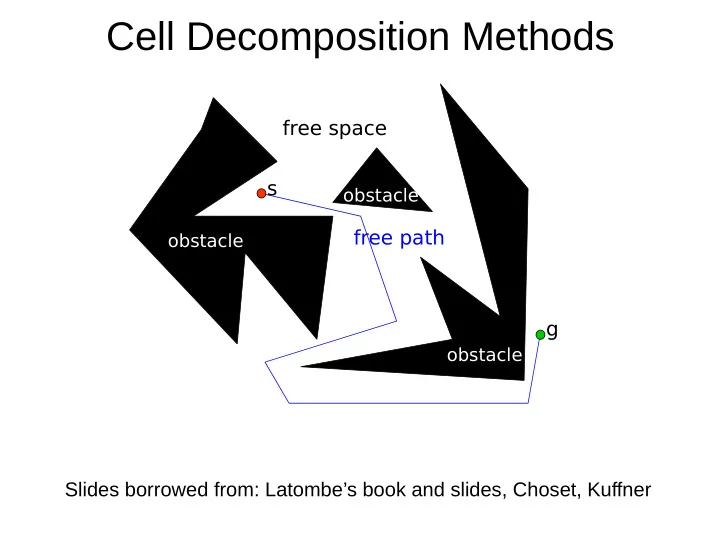
Cell Decomposition Methods free space s obstacle free path obstacle g obstacle Slides borrowed from: Latombes book and slides, Choset, Kuffner Problem Given: a point-robot (robot is a point in space) a start and goal
Cell Decomposition Methods free space s obstacle free path obstacle g obstacle Slides borrowed from: Latombe’s book and slides, Choset, Kuffner
Problem Given: – a point-robot (robot is a point in space) – a start and goal configuration Find: – path from start to goal that does not result in a collision free space s obstacle free path obstacle g obstacle
Motion planning framework Continuous representation Discretization Graph searching (blind, best-fjrst, A*)
Approximate Cell Decomposition
Approximate Cell Decomposition
Approximate Cell Decomposition
Approximate Cell Decomposition
Approximate Cell Decomposition 1. Compute cell decomposition down to some resolution 2. Identify start and goal cells 3. Search for sequence of empty/mixed cells between start and goal cells 4. If no sequence, then exit with no path 5. If sequence of empty cells, then exit with solution 6. If resolution threshold achieved, then exit with failure 7. Decompose further the mixed cells 8. Return to 2
Approximate Cell Decomposition
Approximate Cell Decomposition
Approximate Cell Decomposition
Exact Cell Decomposition
Exact Cell Decomposition
Exact Cell Decomposition
Exact Cell Decomposition
Exact Cell Decomposition
Exact Cell Decomposition … critical events criticality-based decomposition
Exact Cell Decomposition
Exact Cell Decomposition
Exact Cell Decomposition The good: – exact cell decomposition is complete The bad: – it doesn’t scale well to high dimensions
Recommend



![[11] The Singular Value Decomposition The Singular Value Decomposition Gene Golubs license](https://c.sambuz.com/743764/11-the-singular-value-decomposition-the-singular-value-s.webp)

![A PROPOSAL FOR THE CFT DUAL OF ADS3 AT THE STRING SCALE BASED ON arxiv:1803.04420 [hep-th] AND](https://c.sambuz.com/936966/a-proposal-for-the-cft-dual-of-ads3-at-the-string-scale-s.webp)

More recommend
Explore More Topics
Stay informed with curated content and fresh updates.