C ASE S TUDY - arm 2 P RODUCTION C ELL arm 1 elevating rotary - PowerPoint PPT Presentation
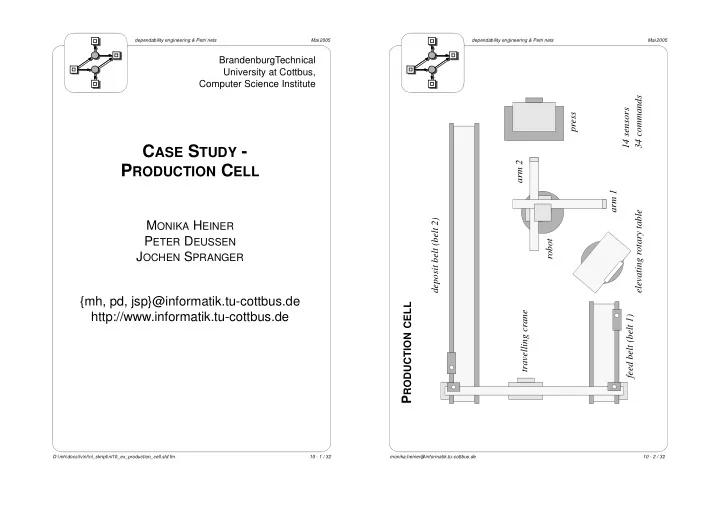
dependability engineering & Petri nets Mai 2005 dependability engineering & Petri nets Mai 2005 BrandenburgTechnical University at Cottbus, Computer Science Institute 34 commands 14 sensors press C ASE S TUDY - arm 2 P RODUCTION C
dependability engineering & Petri nets Mai 2005 dependability engineering & Petri nets Mai 2005 BrandenburgTechnical University at Cottbus, Computer Science Institute 34 commands 14 sensors press C ASE S TUDY - arm 2 P RODUCTION C ELL arm 1 elevating rotary table deposit belt (belt 2) M ONIKA H EINER P ETER D EUSSEN robot J OCHEN S PRANGER {mh, pd, jsp}@informatik.tu-cottbus.de P RODUCTION CELL travelling crane http://www.informatik.tu-cottbus.de feed belt (belt 1) D:\mh\docs\lv\nl\nl_skript\nl10_ex_production_cell.sld.fm 10 - 1 / 32 monika.heiner@informatik.tu-cottbus.de 10 - 2 / 32
dependability engineering & Petri nets Mai 2005 dependability engineering & Petri nets Mai 2005 I NFORMAL S AFETY Σ R EQUIREMENTS ( 21) ❑ The press must not be moved downward, if sensor 1 is true, and analysis t must not be moved upward, if sensor 3 is true. -> Restrictions of machine mobility. ❑ The press may only be closed, when no robot arm is positioned inside it. -> Avoidance of machine collisions. cooperation model B OTTOM - UP DESIGN AND ANALYSIS : analysis analysis analysis analysis analysis ❑ The feed belt may only convey a blank through its light barrier, if the table is in loading position. -> Blanks are not dropped outside safe areas. composition ❑ Blanks may not be put into the press, if it is already loaded. -> Insurance of a sufficient distance between consecutively processed blanks. composition instantiating refinement communication pattern refined controller control model controller additional requirements related to design consistency: ❑ The robot swivel is either stopped or 4. 3. 2. 1. moves in exactly one direction. ❑ ... monika.heiner@informatik.tu-cottbus.de 10 - 3 / 32 monika.heiner@informatik.tu-cottbus.de 10 - 4 / 32
dependability engineering & Petri nets Mai 2005 dependability engineering & Petri nets Mai 2005 C OOPERATION M ODEL , B OUNDED P RO C ON P ATTERN B ASIC D ESIGN P RINCIPLES ❑ production cell = pipeline of machines PRODUCER CONSUMER ready_for_processing ready_to_produce ❑ each machine output_area_free input_area_free takes plates from some input places; processes them; controller puts plates on some output places; processing produce processing consume input_available output_available ready_for_processing ready_to_consume machine input output region controller region THREE TYPES OF COOPERATION PATTERN ❑ cooperation region between two consecutive machines input_area_free output_area_free cooperation table/press machine1 machine2 region input_available output_available input_area_free output_area_free mutual exclusion region arms/crane input_available output_available ❑ mutual exclusive shared resources input_area_free output_area_free robot swivel (to rotate both arms) physical regions belts (intersection of trajectories input_available output_available of different machines) monika.heiner@informatik.tu-cottbus.de 10 - 5 / 32 monika.heiner@informatik.tu-cottbus.de 10 - 6 / 32
dependability engineering & Petri nets Mai 2005 dependability engineering & Petri nets Mai 2005 (A) I NDEPENDENT I NPUT /O UTPUT (B) D EPENDENT I NPUT /O UTPUT ❑ ❑ arms/crane: belts: step-wise synchronization with only one of the adjacent simultaneous control of input and output region controllers, ❑ pattern property ❑ pattern property, e.g. → ( G A step2 ¬ ∨ ∨ ( ( ¬ ( ) ) input _ available input _ area _free → ∨ G A step1 input_available input_area_free ∨ ∨ output _ available )) output _ area _free ❑ ❑ idle idle lock_input_area input_available input_available lock_input_area step1 -> loading step1 output_area_free unlock_input_area lock_output_area input_area_free step2 -> transporting step2 -> transporting output_area_free unlock_input_area lock_output_area input area free step3 -> unloading step3 unlock_output_area unlock output area output_available output available monika.heiner@informatik.tu-cottbus.de 10 - 7 / 32 monika.heiner@informatik.tu-cottbus.de 10 - 8 / 32
dependability engineering & Petri nets Mai 2005 dependability engineering & Petri nets Mai 2005 (C) M UTUALLY T HREE TYPES OF E XCLUSIVE I NPUT /O UTPUT COOPERATION PATTERN , S UMMARY ❑ table/press: the controller must always hold a lock on one of its (A) Independent input/output cooperation regions; arms/crane: ❑ pattern property step-wise synchronization with only one of its adjacent ( ¬ ( ∨ ) ∨ G A input _ available input_area_free controllers, ¬ ( ∨ )) e.g. crane: output _ available output_area_free ( ¬ ( ∧ ) ∨ ¬ ( ∧ ) ) G A ch_DC_free ch_DC_full ch_CF_free ch_CF_full ❑ idle (and having control over output area) (B) Dependent input/output belts: lock input area input available simultaneous control of input and output region step1 -> go to unload position e.g. feed belt: unlock output area ( → G A feed_belt_transporting ¬ ( ∨ ∨ ∨ ) ) ch_CF_free ch_CF_full ch_FT_free ch_FT_full output available step2 -> ready for unloading (C) Mutually exclusive input/output output area free table/press: lock output area the controller must always hold a lock on one of its step3 -> go to load position cooperation regions, e.g. table: unlock input area ( ¬ ( ∨ ) ¬ ( ∨ ) ) ∨ G A ch_FT_full ch_FT_free ch_TA1_full ch_TA1_free input area free monika.heiner@informatik.tu-cottbus.de 10 - 9 / 32 monika.heiner@informatik.tu-cottbus.de 10 - 10 / 32
Mai 2005 10 - 12 / 32 A RM V ERSION 2 output_area_free output_available unlock output area unlock input area lock output area swivel swivel swivel swivel dependability engineering & Petri nets lock input area having swivel having swivel unlock swivel having swivel having swivel unlock swivel lock swivel lock swivel store free unloading loading storing input_available input_area_free monika.heiner@informatik.tu-cottbus.de Mai 2005 10 - 11 / 32 T HREE TYPES OF COOPERATION PATTERN , SUMMARY table / press arms / crane feed / deposit belt (mutually exclusive input / output) (independent input / output) (dependent input / output) ready for loading store free idle (and having control over output area) go pos2 input available move arm to grasp pos input available input available take input dependability engineering & Petri nets turning right loading belt occupied output area free stop go in lock output area output available input area free storing ready for unloading transporting output area free output area free unlock input area go pos1 move arm to ungrasp pos input area free monika.heiner@informatik.tu-cottbus.de turning left unloading belt empty go in stop put output output available output available input area free
Mai 2005 10 - 14 / 32 T HREE ARM VERSIONS , SUMMARY version1 version2 version3 store free store free store free swivel swivel lock swivel input available lock input area input available move arm to grasp pos having swivel waiting for swivel swivel ready to load input available lock input area lock swivel go in loading loading retracted input area free storing unlock input area unlock input area output area free dependability engineering & Petri nets swivel input area free input area free having swivel having swivel move arm to ungrasp pos unlock swivel unlock swivel ready to unload swivel swivel storing storing swivel output area free go in output available lock swivel lock output area swivel having swivel waiting for swivel output area free swivel monika.heiner@informatik.tu-cottbus.de lock output area lock swivel unloading unloading unlock output area unlock output area output available output available having swivel having swivel unlock swivel unlock swivel swivel swivel Mai 2005 10 - 13 / 32 A RM V ERSION 3 output_area_free output_available unlock output area waiting for swivel unlock input area waiting for swivel lock output area swivel swivel swivel swivel lock input area having swivel unlock swivel having swivel unlock swivel dependability engineering & Petri nets lock swivel lock swivel store free unloading loading storing input_available input_area_free monika.heiner@informatik.tu-cottbus.de
Recommend
![[1] Defini=on of allele-specific expression (ASE) Adopted from Unneberg, 2010 One gene can](https://c.sambuz.com/709481/1-defini-on-of-allele-specific-s.webp)


![D ISTRIBUTED S YSTEMS [COMP9243] Lecture 8: Fault Tolerance C ASE S TUDY : AWS FAILURE 2011](https://c.sambuz.com/897642/d-istributed-s-ystems-comp9243-lecture-8-fault-tolerance-s.webp)



More recommend
Explore More Topics
Stay informed with curated content and fresh updates.