
APPROACH TO HYBRID SYSTEMS SAFETY VERIFICATION Andreas Mller - PowerPoint PPT Presentation
A COMPONENT-BASED APPROACH TO HYBRID SYSTEMS SAFETY VERIFICATION Andreas Mller andreas.mueller@jku.at Stefan Mitsch smitsch@cs.cmu.edu Werner Retschitzegger werner.retschitzegger@jku.at Andr Platzer - aplatzer@cs.cmu.edu Wieland
A COMPONENT-BASED APPROACH TO HYBRID SYSTEMS SAFETY VERIFICATION Andreas Müller – andreas.mueller@jku.at Stefan Mitsch – smitsch@cs.cmu.edu Werner Retschitzegger – werner.retschitzegger@jku.at André Platzer - aplatzer@cs.cmu.edu Wieland Schwinger – wieland.schwinger@jku.at Johannes Kepler University, Linz Carnegie Mellon University, Pittsburgh Department of Cooperative Information Systems Computer Science Department http://cis.jku.at/ http://www.ls.cs.cmu.edu
OVERVIEW Background Cyber-Physical System Hybrid System Models Component-based Modeling Component-based Modeling and Verification Approach Components Interfaces Contracts Composition Retains Contract Conclusion and Future Work 2
OVERVIEW Background Cyber-Physical System Hybrid System Models Component-based Modeling Component-based Modeling and Verification Approach Components Interfaces Contracts Composition Retains Contract Conclusion and Future Work 3
BACKGROUND Cyber-physical systems (CPS) Cyber and physical capabilities Continuous physical- part: vehicle movement,… Discrete cyber- part: vehicle steering,… Often safety-critical! Hybrid system models – Model and analyze CPS Hybrid programs: program notation for hybrid system modeling Safety Analysis: Φ → 𝛽 Ψ …starting in Φ, each run of 𝛽 leads to a safe state Ψ Verified using Theorem Prover – KeYmaera Challenging for large monolithic models Component-based hybrid system modeling and verification Component verification results do not always transfer to composite Component-based approach to hybrid system safety verification 4
OVERVIEW Background Cyber-Physical System Hybrid System Models Component-based Modeling Component-based Modeling and Verification Approach Components Interfaces Contracts Composition Retains Contract Conclusion and Future Work 5
RUNNING EXAMPLE - VEHICLE CRUISE CONTROL Vehicle Cruise Control System Overall Safety Property: Keep vehicle’s velocity within bounds Split into two components Actuator Component Receives target velocity Chooses target acceleration, such that target velocity can be reached Outputs actual velocity Cruise Controller Component Receives actual velocity Chooses target velocity Outputs target velocity 6
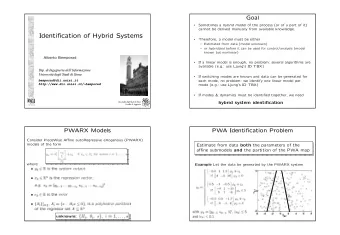
DEFINITION 2: COMPONENT Component 𝐷 = (𝑑𝑢𝑠𝑚, 𝑞𝑚𝑏𝑜𝑢) Actuator: 𝐷 𝑏𝑑 = (𝑑𝑢𝑠𝑚 𝑏𝑑 , 𝑞𝑚𝑏𝑜𝑢 𝑏𝑑 ) 𝑢𝑠 −𝑤 𝑏𝑑 𝑤 𝑏𝑑 choose 𝑏 , such that 𝑤 𝑢𝑠 is 𝑑𝑢𝑠𝑚 𝑏𝑑 ≡ 𝑏 𝑏𝑑 ≔ ; 𝜗 0 ≔ 𝑢 reached until 𝜗 𝑢 𝑏𝑑 𝑑𝑢𝑠𝑚 ′ = 𝑏 𝑏𝑑 , 𝑢 ′ = 1& 𝑢 − 𝑢 𝑏𝑑 0 ≤ 𝜗 Discrete control part 𝑞𝑚𝑏𝑜𝑢 𝑏𝑑 ≡ 𝑤 𝑏𝑑 evolve 𝑤 with rate 𝑏 for at most 𝜗 NO continuous parts 𝑞𝑚𝑏𝑜𝑢 Cruise Control Component Continuous part Choose target velocity ′ = 𝜄 1 , … , 𝑦 𝑜 ′ = 𝜄 𝑜 & 𝐼 𝑦 1 Ordinary differential equations Evolution domain H 7
DEFINITION 3: INTERFACE Interface 𝐽 = (𝑊 𝑗𝑜 , 𝜌 𝑗𝑜 , 𝑊 𝑝𝑣𝑢 , 𝜌 𝑝𝑣𝑢 ) Actuator: 𝐽 𝑏𝑑 𝑊 𝑗𝑜 = 𝑤 𝑢𝑠 …target velocity 𝜌 𝑗𝑜 𝑤 𝑢𝑠 ≡ 0 ≤ 𝑤 𝑢𝑠 ≤ 𝑊 target velocity 𝑤 𝑢𝑠 in velocity interval 𝑊 𝑗𝑜 …variables for input ports 𝑊 𝑝𝑣𝑢 = 𝑤 …current velocity 𝜌 𝑝𝑣𝑢 𝑤 ≡ 0 ≤ 𝑤 ≤ 𝑊 𝜌 𝑗𝑜 … input assumptions current velocity 𝑤 in velocity interval 𝑊 𝑝𝑣𝑢 …variables for output ports Cruise Control Component Reads current velocity 𝜌 𝑝𝑣𝑢 … output guarantees Provides calculated target velocity 8
DEFINITION 4: CONTRACT Contract Actuator: (1) Vehicle initially stopped and … Initial state 𝜚 𝜚 ≡ 𝑤 = 0 ∧ 𝑊 ≥ 0 ∧ ⋯ Target state 𝜔 𝜔 ≡ 0 ≤ 𝑤 ≤ 𝑊 vehicle velocity always in interval Cont 𝐷, 𝐽 ≡ 𝑗𝑜; 𝑑𝑢𝑠𝑚; 𝑢 ′ = 1, 𝑞𝑚𝑏𝑜𝑢 𝑢 = 0 ∧ 𝜚 → ∗ 𝜔 Cruise Controller Component: read valid initial run plant Target velocity always in interval inputs state run ctrl Verified using KeYmaera repeat 0…n times must hold after all runs 𝜔 ≡ 𝜔 𝑡𝑏𝑔𝑓 ∧ Π 𝑝𝑣𝑢 9 (1) Properties coincide due to simple example. Not necessarily the case!
THEOREM 1: COMPOSITION RETAINS CONTRACTS Let… Two Components 𝐷 1 , 𝐽 1 and 𝐷 2 , 𝐽 2 be Components Actuator and Cruise Controller with Interfaces Actuator Contract verified 𝐷𝑝𝑜𝑢 𝐷 1 , 𝐽 1 and 𝐷𝑝𝑜𝑢 𝐷 2 , 𝐽 2 verified 𝜔 𝑏𝑑 ≡ vehicle velocity always in interval Compatible (Def. 6) Cruise Controller Contract verified 𝐷 3 , 𝐽 3 = 𝐷 1 , 𝐽 1 || 𝐷 2 , 𝐽 2 (Def. 5) 𝜔 𝑑𝑑 ≡ target velocity always in interval Then 𝐷𝑝𝑜𝑢 𝐷 3 , 𝐽 3 is also valid, with… Compatible Composite 𝜚 3 ≡ 𝜚 1 ∧ 𝜚 2 both initial states hold 𝜔 3 ≡ 𝜔 1 ∧ 𝜔 2 𝐷 𝑡𝑧𝑡 , 𝐽 𝑡𝑧𝑡 = 𝐷 𝑏𝑑 , 𝐽 𝑏𝑑 || 𝐷 𝑑𝑑 , 𝐽 𝑑𝑑 both safety properties and all output 𝜚 𝑡𝑧𝑡 ≡ 𝜚 𝑏𝑑 ∧ 𝜚 𝑑𝑑 properties hold 𝜔 𝑡𝑧𝑡 ≡ 𝜔 𝑏𝑑 ∧ 𝜔 𝑑𝑑 vehicle velocity always in interval 10 Overall System Property!
OVERVIEW Background Cyber-Physical System Hybrid System Models Component-based Modeling Component-based Modeling and Verification Approach Components Interfaces Contracts Composition Retains Contract Conclusion and Future Work 11
CONCLUSION AND FUTURE WORK We presented a technique to model and verify component-based CPS Split system into components Verify Components Rebuild system from components Transfer Verification Results! Future Work Extend interface and port capabilities Implement framework as tool Add further composition operations Delayed transmission Erroneous transmission 12
A COMPONENT-BASED APPROACH TO HYBRID SYSTEMS SAFETY VERIFICATION Andreas Müller – andreas.mueller@jku.at Stefan Mitsch – smitsch@cs.cmu.edu Werner Retschitzegger – werner.retschitzegger@jku.at André Platzer - aplatzer@cs.cmu.edu Wieland Schwinger – wieland.schwinger@jku.at Johannes Kepler University, Linz Carnegie Mellon University, Pittsburgh Department of Cooperative Information Systems Computer Science Department http://cis.jku.at/ http://www.ls.cs.cmu.edu
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.