Coordination of Components in a Distributed Discrete-Event System - PowerPoint PPT Presentation
Coordination of Components in a Distributed Discrete-Event System Ahmed Khoumsi Universit e de Sherbrooke, Canada. ISPDC, Lille, France, 4-6 July 2005 Outline Outline Introduction Problem, Coordination
✬ ✩ Coordination of Components in a Distributed Discrete-Event System Ahmed Khoumsi Universit´ e de Sherbrooke, Canada. ISPDC, Lille, France, 4-6 July 2005 ✫ ✪
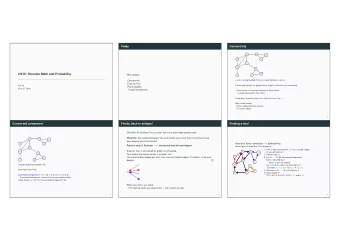
✬ ✩ Outline Outline • Introduction • Problem, Coordination • Model used: Automata with Actions (AwA) • Input of the problem: DES distributed in several sites • Approach of coordination • Result of coordination: a component in each site • Reducing communication • Nonnegligible reaction delays and communication delays • Application in supervisory control • Conclusion: contributions and future work ✫ ✪ “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 1
✬ ✩ Introduction Introduction Let a distributed DES R that : - executes events in several sites distant with each other, - is observed by local components . Each local component : - observes only the events in its site - may have to execute actions depending on the global state of R . Consequence : a component may be unable to distinguish global states of R just from its local observations. ✫ ✪ “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 2
✬ ✩ Problem, Coordination Problem, Coordination Problem arises when a component: - cannot distinguish two states of R - does not execute the same actions in the two (indistinguishable) states Coordination for solving the problem: the components coordinate themselves by exchanging (coordination) messages communication R 1 R 2 Events Events o b s s e e r v v r e e s s b o Site 2 Site 1 Distributed DES ✫ ✪ “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 3
✬ ✩ Model used : Automata with Actions (AwA) Model used : Automata with Actions (AwA) A AwA is quite similar to a Finite State Automaton (FSA), with the difference that a set of actions can be associated to each state. Actions associated to a state q are executed each time q is reached. b 2 3 1 a d 4 γ δ α β γ δ γ δ c µ ν b e c δ 5 ✫ ✪ “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 4
✬ ✩ Input of the problem: DES distributed in 2 sites Input of the problem: DES distributed in 2 sites Distributed DES modeled by AwA R = ( S, Σ 1 ∪ Σ 2 , T, Γ 1 ∪ Γ 2 , F, s 0 ) S : set of states Σ 1 ∪ Σ 2 is the set of events executed by R , in sites 1 and 2, resp. Σ i contains events observed by R i , the component in site i. T is a transition relation: T ⊆ S × (Σ 1 ∪ Σ 2 ) × S . Γ i contains actions executed by R i . → 2 Γ 1 ∪ Γ 2 F : S − F ( q ) indicates the actions to be executed each time the state q is reached. ✫ ✪ “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 5
✬ ✩ Approach of coordination: example Approach of coordination: example b 1 2 3 1 a 1 d 2 4 γ 1 δ 1 α 1 β 1 γ 1 δ 1 γ 1 δ 1 c 1 µ 2 ν 2 b 1 c 2 c 1 δ 1 5 [1; a 1 ; 2] , [3; c 1 ; 2] in Site 1 and followed only by events and actions in the same site. No communication needs to follow these transitions. [3; d 2 ; 4] in Site 2 and followed only by events in the same site and by no action. No communication needs to follow this transition. [2; b 1 ; 3] , [5; b 1 ; 3] , [5; c 1 ; 3] in Site 1 and followed by event d 2 in Site 2. A communication from R 1 to R 2 must follow these transitions. [4; c 2 ; 5] in Site 2 and followed by events and actions in Site 1. ✫ ✪ A communication from R 2 to R 1 must follow this transition. “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 6
✬ ✩ Result of coordination: component in each site Result of coordination: component in each site 2 3 b 1 1 d 2 a 1 4 α 1 β 1 γ 1 δ 1 γ 1 δ 1 γ 1 δ 1 µ 2 ν 2 c 1 b 1 c 2 c 1 δ 1 R 5 2 2 3−4 2−3 b 1 1 s (3) 1 a 1 α 1 β 1 γ 1 δ 1 γ 1 δ 1 γ 1 δ 1 c 1 2 2 s (3) 1 5−3 r (5) 1 b 1 R 1 δ 1 c 1 5 1−2 1 3−2 4 d 2 µ 2 ν 2 r (3) 2 c 2 1 1 r (3) 2 r (3) 2 4−5 R 2 1 s (5) 5 2 ✫ ✪ “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 7
✬ ✩ Reducing communication Reducing communication Lemma : A communication defined by ( s j i ( k ) , r i j ( k )) is useless (and thus, can be removed) when r i j ( k ) occurs only in transitions: • whose destination state is associated to no action, and • whose origin state has no other outgoing transition. 1 2 d 2 b 1 r (3) s (3) µ 2 ν 2 a 1 2 1 α 1 β 1 γ 1 δ 1 γ 1 δ 1 γ 1 δ 1 c 1 c 2 2 1 s (3) r (3) 1 2 1 r (3) r (5) 2 R 2 2 1 b 1 R 1 1 c 1 s (5) δ 1 2 becomes b 1 d 2 a 1 µ 2 ν 2 α 1 β 1 γ 1 δ 1 γ 1 δ 1 γ 1 δ 1 c 1 d 2 c 2 c 1 b 1 r (5) 2 1 R 2 1 R 1 s (5) δ 1 2 ✫ ✪ “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 8
✬ ✩ Nonnegligible reaction and communication delays Nonnegligible reaction and communication delays Let: R be a reaction delay of a component to send a message C be a communication delay of a message D be an upper bound of R + C Lemma : The proposed coordination method is applicable if the distributed system stays during at least D in every state requiring communication. ✫ ✪ “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 9
✬ ✩ Application in supervisory control Application in supervisory control The coordination method has been applied in Supervisory Control Theory (SCT), where: Components are called supervisors. Actions consist of enabling/disabling events. ✫ ✪ “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 10
✬ ✩ Conclusion Conclusion Contributions : Proposition of a coordination method which is better than existing ones. Future work : - Implementation and application to concrete nontrivial systems, - Generalization for real-time DES. ✫ ✪ “Coordination of Components in a Distributed Discrete-Event System”, ISPDC, 4-6 July 2005. 11
Recommend














More recommend
Explore More Topics
Stay informed with curated content and fresh updates.