About prior saturation points for affine control systems T´ erence Bayen (Universit´ e de Montpellier) (collaboration avec O. Cots) J OURN ´ EES MODE 2018 - A UTRANS 28 mars 2018 T. Bayen (Universit´ e de Montpellier) 1 / 25
Outline Preliminary results for affine controlled systems 1 Saturation phenomenon in a fed-batch model 2 Determination of prior saturation points and the notion of bridge 3 T. Bayen (Universit´ e de Montpellier) 2 / 25
Preliminary results for affine controlled systems Outline Preliminary results for affine controlled systems 1 Saturation phenomenon in a fed-batch model 2 Determination of prior saturation points and the notion of bridge 3 T. Bayen (Universit´ e de Montpellier) 3 / 25
Preliminary results for affine controlled systems Minimal time control problem Given smooth vector fields f , g : R n ! R n and a closed subset T ⇢ R n , consider 8 x = f ( x ) + u ( t ) g ( x ) , ˙ | u | 1 , > < v ( x 0 ) := inf u 2 U T u s . t . x u ( T u ) 2 T > : x ( 0 ) = x 0 . Goal Synthesize an optimal feedback control x 0 7! u [ x 0 ] by: u [ x 0 ] := u ⇤ ( 0 , x 0 ) . We suppose classical hypotheses ensuring existence of an optimal control . T. Bayen (Universit´ e de Montpellier) 4 / 25
Preliminary results for affine controlled systems Application of the Pontryagin Maximum Principle • Hamiltonian condition: H = ⌦ p , f ( x ) ↵ + u ⌦ p , g ( x ) ↵ + p 0 ) for a.e. t 2 [ 0 , T u ] 8 � ( t ) > 0 ) u ( t ) = + 1 > > > < � ( t ) < 0 ) u ( t ) = � 1 > > > � ( t ) = 0 , 8 t 2 [ t 1 , t 2 ] ) Singular arc : where t 7! p ( t ) satisfies ˙ p ( t ) = �r x H ( x ( t ) , p ( t ) , � 1 , u ( t )) . • By differentiating the switching function t 7! � ( t ) := ⌦ p ( t ) , g ( x ( t )) ↵ : � ( t ) = ⌦ p ( t ) , [ f , g ]( x ( t )) ↵ , ˙ � ( t ) = ⌦ p ( t ) , [ f , [ f , g ]]( x ( t )) ↵ + u ( t ) ⌦ p ( t ) , [ g , [ f , g ]]( x ( t )) ↵ ¨ • The singular control u s : [ t 1 , t 2 ] ! R is ⌦ p ( t ) , [ f , [ f , g ]]( x ( t )) ↵ u s ( t ) := � ⌦ p ( t ) , [ g , [ f , g ]]( x ( t )) ↵ (for a singular arc of order 1). T. Bayen (Universit´ e de Montpellier) 5 / 25
Preliminary results for affine controlled systems Saturation phenomenon Question Consider a singular arc of order 1 that satisfies Legendre-Clebsch optimality condition d 2 @ dt 2 H u > 0 ( i.e. it is a turnpike), and such that the singular arc becomes non-admissible i.e. @ u 9 t 2 [ t 1 , t 2 ] , | u s ( t ) | > 1 , • Should we follow the singular arc until the saturation point such that u s ( t ⇤ ) = 1 ? • How does it affect the synthesis ? T. Bayen (Universit´ e de Montpellier) 6 / 25
Preliminary results for affine controlled systems Related works about saturation and prior-saturation A. Rapaport, T. B., M. Sebbah, A. Donoso, A. Torrico, Dynamical modelling and optimal control of landfills , Mathematical Models and Methods in Applied Sciences, issue No 05, vol. 26, pp. 901-929, 2016. T. B., F . Mairet, M. Mazade, Analysis of an optimal control problem connected to bioprocesses involving a saturated singular arc , DCDS, series B, vol. 20, 1, pp.39–58, 2015. B. Bonnard, O. Cots, S. Glaser, M. Lapert, D. Sugny, Y. Zhang, Geometric optimal control of the contrast imaging problem in nuclear magnetic resonance , IEEE Trans. Automat. Control, 57 (2012), no 8, pp. 1957–1969. H. Schaettler and M. Jankovic, A synthesis of time-optimal controls in the presence of saturate singular arcs , Forum Mathematicum, 5, (1993), pp. 203–241. U. Ledzewicz, H. Sch¨ attler, Anti-angiogenic therapy in cancer treatment as an optimal control problem , SIAM J. on Control and Optimization, 46, 3, pp. 1052–1079, 2007. U. Ledzewicz, H. Sch¨ attler, Geometric Optimal Control : Theory, Methods and Examples , Springer, 2012. B. Bonnard, M. Chyba, Singular Trajectories and their role in Control Theory , Springer, SMAI, vol. 40, 2002. T. Bayen (Universit´ e de Montpellier) 7 / 25
Preliminary results for affine controlled systems Existence of a prior saturation point in the plane x = f ( x ) + u ( t ) g ( x ) ˙ Assumption • The target T is reachable from every point x 0 2 R 2 and det ( f ( x ) , g ( x )) < 0 for any x 2 R 2 (i.e. ∆ 0 = ; ). d 2 @ • Along ∆ SA , the strict Legendre-Clebsch condition dt 2 H u > 0 is satisfied. @ u • The singular locus ∆ SA := { x 2 R 2 ; det ( g ( x ) , [ f , g ]( x ) = 0 ) } has exactly one saturation point x ? s.t. ✓ ( x ? ) = 1 where for x 2 ∆ SA ⌦ g ( x ) ? , [ f , [ f , g ]]( x ) ↵ ✓ ( x ) := � ⌦ g ( x ) ? , [ g , [ f , g ]]( x ) ↵ • Moreover, there exists a neighborhood V of x ? s.t. ✓ is increasing in V . • If Γ � := { x m ( t , x ? ) ; t � 0 } where x m ( · , x ? ) is the unique solution of the system starting from x ? at time 0 with the control u = � 1, then T \ Γ � = ; . T. Bayen (Universit´ e de Montpellier) 8 / 25
Preliminary results for affine controlled systems Existence of a prior saturation point Theorem Under the previous assumptions: • there exists a prior-saturation point x a 2 ∆ SA : any admissible singular arc losses its optimality at x a (say at time t a ) such that ✓ ( x a ) 2 ] � 1 , 1 [ . • an optimal control satisfies u = + 1 in a right neigborhood of t a . Sketch of proof . The switching function t 7! � ( t ) := ⌦ p ( t ) , g ( x ( t )) ↵ satisfies the ODE: ˙ � ( t ) = � u ( t ) � ( t ) + ↵ ( x u ( t )) a . e . t 2 [ 0 , T u ] where ↵ ( x ) := � det ( g ( x ) , [ f , g ]( x )) � ( x ) := det ( f ( x ) , [ f , g ]( x )) and , det ( f ( x ) , g ( x )) det ( f ( x ) , g ( x )) and � u ( t ) := � ( x u ( t )) � ↵ ( x u ( t )) u ( t ) , t 2 [ 0 , T u ] . • Switching rule : switching points in { x 2 R 2 ; det ( f ( x ) , [ f , g ]( x )) > 0 } occur from � 1 to 1. • If x u ( · ) is optimal until x ? at t = t ? ) � ( t ) < 0, 8 t > t ? ) contradiction with the PMP . T. Bayen (Universit´ e de Montpellier) 9 / 25
Saturation phenomenon in a fed-batch model Outline Preliminary results for affine controlled systems 1 Saturation phenomenon in a fed-batch model 2 Determination of prior saturation points and the notion of bridge 3 T. Bayen (Universit´ e de Montpellier) 10 / 25
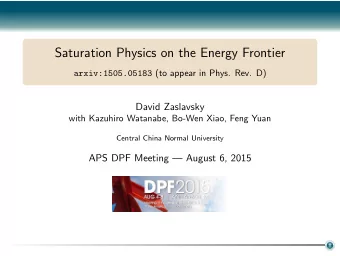
Saturation phenomenon in a fed-batch model Fed-batch reactor with one species • Biological reaction : S ! X S in X,S 8 = µ ( s ) x � u ˙ x v x , > > Feed pump > Outlet pump when V = v max = � µ ( s ) x + u < s ˙ v ( s in � s ) , > > > ˙ v = u , : • X , S : micro-organisms, substrate X, S, V concentrations ; V : volume ; sensors u : dilution rate s in : input substrate concentration Agitation system, Temperature θ ,... • Objective : transformation of s in into s ref s.t. s ref ⌧ s in . T. Bayen (Universit´ e de Montpellier) 11 / 25
Saturation phenomenon in a fed-batch model The two-dimensional optimal control problem • Target set: T := { ( s , v ) 2 [ 0 , s in ] ⇥ R ⇤ + ; s s ref and v = ¯ v } = [ 0 , s ref ] ⇥ { ¯ v } . • Notice that M := v ( x + s � s in ) is conserved ) x = M v + s in � s • Admisible control set U := { u : [ 0 , + 1 ) ! [ 0 , 1 ] ; u meas . } Optimal control problem h M 8 i ( + u ˙ > s = � µ ( s ) v + s in � s v ( s in � s ) , ( s ( T u ) , v ( T u )) 2 T , > < u 2 U T u , min s . t . > ( s ( 0 ) , v ( 0 )) = ( s 0 , v 0 ) . ˙ > v = u , : ¯ µ s • Kinetics of Haldane type : µ ( s ) = k + s + k 0 s 2 with a unique maximum ¯ s 2 [ 0 , s in ] s.t. µ 0 (¯ s ) = 0 . T. Bayen (Universit´ e de Montpellier) 12 / 25
Saturation phenomenon in a fed-batch model Pontryagin Maximum Principle " � s ( s in � s ) # h M i • Hamiltonian : H := � � s µ ( s ) v � ( s � s in ) + u + � v + � 0 . v | {z } � • Switching function t 7! � ( t ) 8 � ( t ) < 0 = ) u ( t ) = 0 ( No feeding ) , > < > � ( t ) > 0 = ) u ( t ) = 1 ( Maximal feeding ) , : Lemma (i) The singular locus is s = ¯ s and the singular control is " # M u s [ v ] := µ (¯ s ) v + s in � ¯ s (ii) In the set { s > ¯ s } , resp. { s < ¯ s } , only a switching from 0 to 1 , resp. from 1 to 0 is possible T. Bayen (Universit´ e de Montpellier) 13 / 25
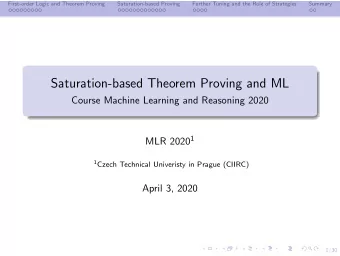
Saturation phenomenon in a fed-batch model Synthesis without saturation Theorem If the singular arc is admissible i.e. 8 v 2 [ 0 , ¯ v ] , u s [ v ] 1 , the optimal feedback control is: 8 s < ¯ v < ¯ 1 if s and v , > > > s = ¯ u [ s , v ] = < u s [ v ] if s and v ¯ v , > > > s > ¯ v = ¯ 0 if s or v . : 3 2.5 2 Volume 1.5 1 0.5 0 0 1 2 3 4 5 6 Substrate T. Bayen (Universit´ e de Montpellier) 14 / 25
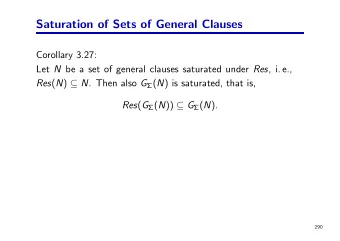
Saturation phenomenon in a fed-batch model Synthesis with saturation Assumption : 9 v ⇤ < ¯ v s.t. u s [ v ⇤ ] = 1 : 1 M v ⇤ := s ) � µ (¯ s in � ¯ s Corollary • Any singular optimal trajectory leaves the singular arc before v ⇤ with u = 1 i.e. there exists v a < v ⇤ such that a singular arc is not optimal for v > v a . • A switching curve emanates from (¯ s , v a ) . Sketch of proof . verify the assumptions of the previous proposition. Definition The point (¯ s , v a ) is a prior saturation point ; it is a frame point of type ( CS ) 2 at the intersection of a singular arc and a switching curve emanating from this point. U. Boscain, B. Piccoli, Optimal Syntheses for Control Systems on 2-D Manifolds , Springer SMAI, vol. 43, 2004. T. Bayen (Universit´ e de Montpellier) 15 / 25
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries