variational methods for effective dynamics, part II Robert L. Jerrard Department of Mathematics University of Toronto Minischool on Variational Problems in Physics October 2-3, 2014 Fields Institute Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 1 / 16
Our main concern Γ If F ε → F 0 , do the evolution equations ˙ x ε ( t ) ¨ x ε ( t ) = −∇ F ε ( x ( t )) J ˙ x ε ( t ) converge to some limiting problem (eg, the ε = 0 evolution problems)? for gradient flows, ∃ more tools and abstract general theory. for Hamiltonian systems, no general theory, but calculus of variations can help: rephrase as dynamic stability problem use variational estimates Strategy: find functionals ζ ( v ; t ) such that ζ ( v , t ) ≈ 0 ≈ min ζ iff v ( t ) behaves as hoped, and d dt ζ ( v , t ) � ζ ( v , t ) . Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 2 / 16
Recall also Γ -convergence : general theory, with many examples Γ -convergence and gradient flows: general theory, few examples Γ -convergence and Hamiltonian systems: no general theory, few examples. Yesterday we saw an example in which simple variational stability arguments suffice to characterize effective dynamics. Today: an example in which this is not the case.... but more refined variational estimates are useful. (eg, quantitative improvements of Γ -convergence compactness results.) Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 3 / 16
Today we will focus on � |∇ v | 2 + η p � 1 � 4 ε 2 ( | v | 2 − 1 ) 2 R 2 η 2 E ε ( v ) := | log ε | 2 for v ∈ H 1 (Ω; C ) , where Ω ⊂ R 2 and p ≥ 0; together with η 2 ∇ · ( η 2 ∇ v ) + η p i | log ε | ∂ t v − 1 ε 2 ( | v | 2 − 1 ) v = 0 . The main cases of interest are p = 0 , 1 (although in fact p is basically irrelevant). The energy is conserved by solutions of the PDE.. We assume that η is fixed, C 2 , positive. Still okay if η = η ε > 0 converges uniformly to a limit, limit need only be nonnegative Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 4 / 16
Motivations 1 . The PDE (with p = 1) may be obtained by transforming the equation i ∂ t u − ∆ u + 1 � V ( x ) + | u | 2 � in R 2 u = 0 ε 2 with η = η ε minimizing V ( x ) | u | 2 + | u | 4 � 1 2 |∇ ζ | 2 + 1 � � ζ �→ dx ε 2 2 4 R 2 subject to L 2 constraint. Indeed, define v by u ( x , t ) = η ( x ) e − i λ ε t v ( x , t | log ε | ) . Describes point vortices in pancake-shaped Bose-Einstein condensates 2 . The PDE (with p = 0) may be obtained by symmetry reduction from i ∂ t u − ∆ u + 1 � | u | 2 − 1 � in R 3 u = 0 ε 2 (Write in cylindrical coordinates ( r , θ, z ) , seek solutions independent of θ .) Then Ω = ( 0 , ∞ ) × R and η 2 = r . Describes vortex rings in a 3d ideal homgeneous quantum fluid Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 5 / 16
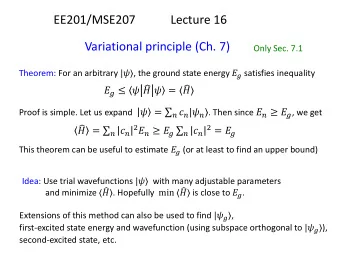
experimental data showing vortex motion in a Bose-Einstein condensate – vortices precess at constant angular velocity Frelich, Bianchi, Kaufman, Langin and Hall, Science 2010 Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 6 / 16
Notation : Given v ∈ H 1 (Ω; C ) we will write j ( v ) := − i v ∇ v − v ¯ 2 (¯ ∇ v ) := momentum density ω ( v ) = 1 2 ∇ × j ( v ) := vorticity Fact : If v = ρ e i φ then j ( v ) = ρ 2 ∇ φ Fact : If v = v 1 + iv 2 then ω ( v ) = det ( ∂ i v j ) = Jac ( v ) Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 7 / 16
Theorem ( J., Sandier, J.-Soner, Alberti-Baldo-Orlandi .... ’98-’03) 0. compactness : Assume that ( v ε ) ⊂ H 1 (Ω; C ) and that � � |∇ v | 2 + η p 4 ε 2 ( | v | 2 − 1 ) 2 E ε ( v ) = 1 ≤ C for all ε ∈ ( 0 , 1 ] . � R 2 η 2 | log ε | 2 Then there exists points a i ∈ Ω and integers d i such that π � | d i | η 2 ( a i ) < ∞ and after possibly passing to a subsequence � in W − 1 , 1 , ω ( v ε ) → π d i δ a i (1) 1. Assume that ( v ε ) ⊂ H 1 (Ω; C ) satisfies (1) . Then � | d i | η 2 ( a i ) lim inf ε → 0 E ε ( v ε ) ≥ π 2. For any measure as on the right-hand side of (1) , there exists a sequence ( v ε ) such that (1) holds and � | d i | η 2 ( a i ) lim sup E ε ( v ε ) ≤ π ε → 0 Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 8 / 16
About the theorem: 1. Why ω ( v ) ≈ π � d i δ a i ? Main point: Let S := {| v | ≤ 1 / 2 } , and assume that S ⊂ ∪ B i , B i := B ( x i , r i ) with deg ( v ; ∂ B i ) =: d i . Then � � � ω ( v ) − π d i δ x i � W − 1 , 1 ≤ C ( r i ) E ε ( v ) | log ε | . 2. Why E ε ( v ) � π � | d i | η 2 ( a i ) ? Main points: model lower bound on balls ( e.g. equivariant, ie v = f ( r ) e i θ ) is � 1 2 |∇ v | 2 + 1 4 ε 2 ( | v | 2 − 1 ) 2 ≥ π log ( r ε ) − O ( 1 ) B ( s ) there is an algorithm for covering S with balls satisfying comparable lower bound, with tunable � r i . These tools yield more: quantitative estimates for fixed ε ≪ 1. Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 9 / 16
Theorem ( J.-Smets ’13) Let v ε be a sufficiently smooth solution of η 2 ∇ · ( η 2 ∇ v ε ) + η p i | log ε | ∂ t v ε − 1 ε 2 ( | v ε | 2 − 1 ) v ε = 0 . with initial data v 0 ε such that ω ( v 0 � � η 2 ( a 0 ε ) → π d i δ a 0 i , E ε ( v ε ) → π i ) i.e. a recovery sequence for the measure π � d i δ a 0 with | d i | = 1 for all i. i . Then � ω ( v ε ( t )) → π d i δ a i ( t ) , where each a i ( t ) solves a i ( t ) = d i ∇ ⊥ log η 2 ( a i ) , a i ( 0 ) = a 0 ˙ i . This result is valid as long as no two points a i ( · ) collide. Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 10 / 16
The case η = constant is easier and has been understood since the late 90s, see Colliander-J, Lin-Xin, Spirn, Gustafson-Sigal, J-Spirn, .... Our proof takes some ingredients from from some of these, particularly J-Spirn . The following discussion (except at the last slide) emphasizes new points. Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 11 / 16
Heuristics We will study the PDE for ε ≪ 1 fixed, and we write v instead of v ε . We need to understand evolution of ω ( v ) . Evolution of ω ( v ) governed by identity (in integral form) d � ϕω ( v ) dt Ω η 2 η 2 � � 1 � ε 2 ( | v | 2 − 1 ) 2 x k = ε lj ϕ x l v x j · v x k + δ jk + ε lj ϕ x k x l v x j · v x k η 2 | log ε | Ω Green term is lower-order. If ϕ is linear near vortices, then blue term is lower-order. We need v x i · v x j � | log ε | ≈ πδ ij δ ξ i ( t ) , where ξ i ( t ) ≈ vortex locations. Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 12 / 16
More heuristics Let us suppose that quantitative versions of Γ -limit theorem hold for fixed ε > 0. This is in fact the case. Quantitative compactness should imply: there exist points ξ i ( t ) = “actual vortex locations" such that � ε α ) � ω ( v ( t )) − π d i δ ξ i ( t ) � W − 1 , 1 ≪ 1 ( e.g. Define � r a ( t ) := � ω ( v ( t )) − π d i δ a i ( t ) � W − 1 , 1 � ≈ | a i ( t ) − ξ i ( t ) | . Quantitative Γ -limit lower bound should imply � � η 2 ( a i ( t )) ≈ E ε ( v ( t )) ≥ π η 2 ( ξ i ) − o ( 1 ) π and � � η 2 ( ξ i ) ≥ π η 2 ( a i ) − C Lip ( η 2 ) r a ( t ) . π Then r a ( t ) � tightness of Γ -lim lower bound . Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 13 / 16
Still more heuristics So far r a ( t ) � tightness of Γ -lim lower bound . We need v x i · v x j � ≈ πδ ij δ ξ i ( t ) . | log ε | In fact this would let us control growth of r a ( t ) . Note also, theorem states r ε a ( t ) → 0 as ε → 0. So we would like v x i ( t ) · v x j ( t ) � � � � � − πδ ij δ ξ i ( t ) W − 1 , 1 ≤ Cr a ( t ) � � | log ε | � � however, this is not true. In fact all that holds is v x i ( t ) · v x j ( t ) � � � � � � − πδ ij δ ξ i ( t ) W − 1 , 1 ≤ C r a ( t ) � � | log ε | � � Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 14 / 16
More rigorously: Our starting point is quantitative compactness: Lemma Under assumptions of the theorem, there exist points ξ i ( t ) such that � d i δ ξ i ( t ) � W − 1 , 1 ≤ r ξ ( t ) ≈ C ε 1 − r a ( t ) | log ε | . � ω ( v ( t )) − π Then construct an ideal current j ∗ = j ∗ ( t ) supported ∪ B ( ξ i ( t ) , | log ε | − 1 ) such that (simplifying somewhat) �∇ × ( j ( v ) − j ∗ ) � W − 1 , 1 ≤ Cr ξ j ∗ i j ∗ � � W − 1 , 1 ≤ C log ( r ξ ( t ) � � k � | log ε | − πδ ik δ ξ i ( t ) ) / | log ε | � � ε � � 2 q − 1 � j ∗ � q ≤ Cr ξ ( t ) for q > 2 . j ∗ i j ∗ k in identity for d � Basic strategy : to replace v x i v x k by ϕω ( v ) , dt and try to control errors. main error term is C | log ε | − 1 log r ξ ( t ) ≈ C | log ε | − 1 log ( ε 1 − ra ( t ) ) ≈ r a ( t ) . ε ε Robert L. Jerrard (Toronto ) effective dynamics II Variational Problems in Physics 15 / 16
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries







![hebma@nju.edu.cn The context of this lecture is based on the publication [10] and [13] XVI - 2](https://c.sambuz.com/1038539/hebma-nju-edu-cn-s.webp)