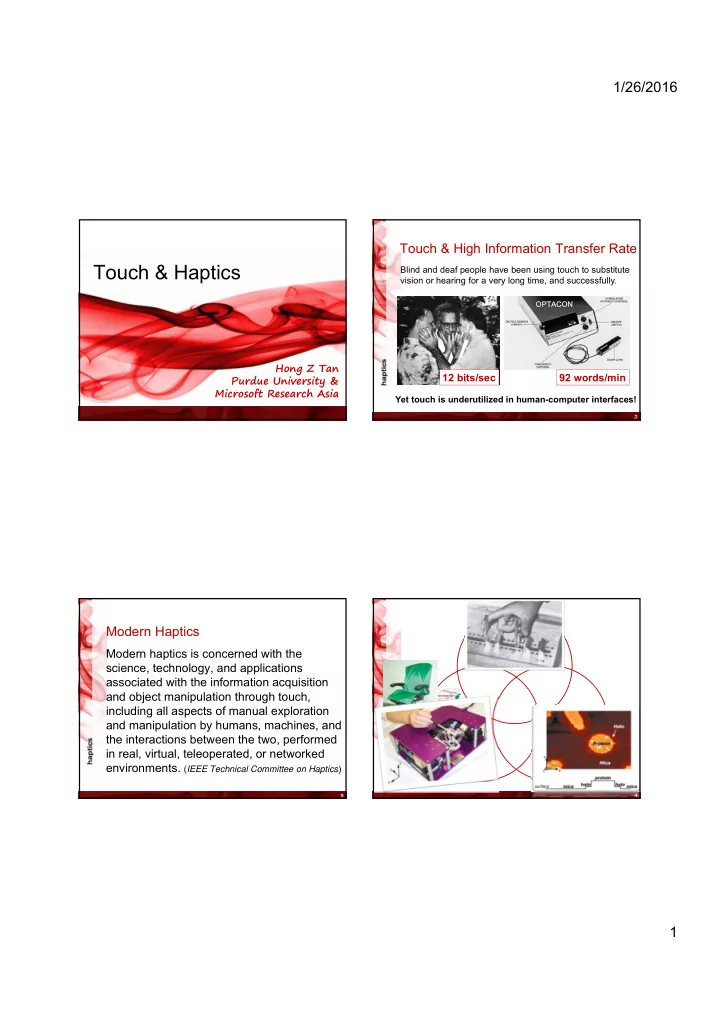
1/26/2016 Touch & High Information Transfer Rate Touch & Haptics Blind and deaf people have been using touch to substitute vision or hearing for a very long time, and successfully. OPTACON Hong Z Tan Purdue University & 12 bits/sec 92 words/min Microsoft Research Asia Yet touch is underutilized in human-computer interfaces! 2 Modern Haptics Human Haptics Modern haptics is concerned with the science, technology, and applications associated with the information acquisition and object manipulation through touch, including all aspects of manual exploration and manipulation by humans, machines, and Machine Computer the interactions between the two, performed Haptics Haptics in real, virtual, teleoperated, or networked environments. ( IEEE Technical Committee on Haptics ) 3 4 1
1/26/2016 When we touch something We feel Exploratory Procedures a panel! nerve innervation density: 0.8 – 1.0 mm 5 6 Vibrotactile Actuators (intensity, frequency, waveform, duration, delay, etc.) Haptic Display Technologies Vibrotactile actuators (tactors) Force displays $1.50 Thermal displays Array displays (on the torso) Frequency Response of C2 Tactor (Rubberbanded) With 1.5V Frequency Response of C2 Tactor (Strapped to Wrist) With ptp Input 1.5V ptp Input Fingertip displays 50 35 30 40 25 30 20 Gain Ratio (dB) Gain Ratio (dB) 20 15 10 10 5 0 0 50 100 150 200 250 300 350 400 450 0 -10 0 50 100 150 200 250 300 350 400 450 -5 -20 -10 Frequency (Hz) Frequency (Hz) 7 8 2
1/26/2016 Force-feedback Haptic Devices Custom-Designed Force Displays (intuitive, conveys object shape, surface properties, etc.) (position resolution, bandwidth, back-drivability) From Butterfly Haptics: http://butterflyhaptics.com/ PHANToM by The (Purple) Mini-stick The Maglev Falcon by Novint, designed by designed by SensAble Technologies modified for torque display Dov Adelstein, NASA Ames Ralph Hollis, CMU $200 Position resolution: 1.5 m Omega by • PHANToM: 30 m Force Dimension Omega: 9 m • 9 10 Thermal Display (very new…) Array Displays Index finger Index finger Thermistor 1 Temperature Curve 40 40 Thermistor 2 35 35 Peltier device Temperature (C) Peltier device 30 30 A/D A/D 25 25 20 20 0 0 2 2 4 4 6 6 8 8 10 10 12 12 Time (s) Time (s) Bipolar Power Supply Bipolar Power Supply & & D/A D/A Voltage Amplifier Voltage Amplifier PI Control Real Simulated Real material Simulated material Photo Courtesy of Dr. Lynette Jones, MIT Slide courtesy of Dr. Lynette Jones, MIT. 11 12 3
1/26/2016 Fingertip Displays Fingertip Displays Piezoelectric actuators excite the glass surface at resonance Courtesy of Prof. Ian Summers Exeter University, UK TeslaTouch by Disney TPaD Graphical display is positioned underneath Courtesy of Prof. Ed Colgate the glass surface Northwestern Univ. 13 14 A “Full-Range” Position Display There is NO “Standard” Haptic Display We simply do not have the haptic Range of perceivable motion/vibration equivalent of a computer monitor or A “general” position display speaker today requires a bandwidth of > 500 Hz Either a position (vibration) or force a dynamic range > 100dB display, but not both At 250 Hz, human hands Hard to cover the whole body surface can sense a 0.1 m (pk) vibration At < 5 Hz, human fingers has a > 10 mm range of motion T ACTUATOR , A haptic hearing aid for individuals with hearing impairments 15 16 4
1/26/2016 The 400-Probe Stimulator Reaching the Human Resolution Now, more “practical” systems … APPLICATIONS OF HAPTICS Photo Courtesy of Dr. Diane Pawluk, VCU 17 18 Recent Innovations (from BloombergNewsweek, illustrations by Mckibillo) Pacinian Artificial Muscle Tactus Senseg Technology Typing is hard with visual feedback only We Can Do Better! Buzzing helps, but … it can feel sluggish and … cheap 19 20 5
1/26/2016 How Does It Work? Haptics in mobile phone #1 Click feedback without real keys Acceleration profile of a telephone key Input / output of piezo actuator 21 22 The “Touchy Feely Finger” Feeling Surface Texture How People Do It Win8 OS Slate (Metro UI) | Authoring email in Windows Live Mail Eyes track only one part ( vertical letter display close to the cursor ) Texture is defined as the microscale structure of of the screen to figure out what’s going on. a surface Humans perceive texture through two types of cues: spatial-intensive & temporal Perceptual Dimensions of Texture: Roughness Hardness Stickiness Left thumb does the positioning, along an arc. Right thumb does the selecting, at one of 3 locations. Left feels ridges between letters. Right feels confirmation clicks. 23 24 6
1/26/2016 Simulating Texture through Vibrations Feeling Surface Texture How Machine Does It 25 26 Advantages of Touch Simulating Texture through Friction Private, Fast (spinal reflex), Intuitive Large receptor area Multidimensional (force, motion, vibration, thermal) Low cognitive load in stressful situations Compliments auditory/visual inputs TeslaTouch (UIST 2010) Trick : Lateral force can create the illusion of height variations in microscale (i.e., texture) F Virtual hole Flat surface Virtual bump F 27 28 7
1/26/2016 T OWARDS G RACEFUL I NTERACTION BY I NTEGRATING H APTICS INTO U SER I NTERFACES 29 8
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries