The Atmospheric Monitoring system of the JEM-EUSO telescope Simona - PowerPoint PPT Presentation
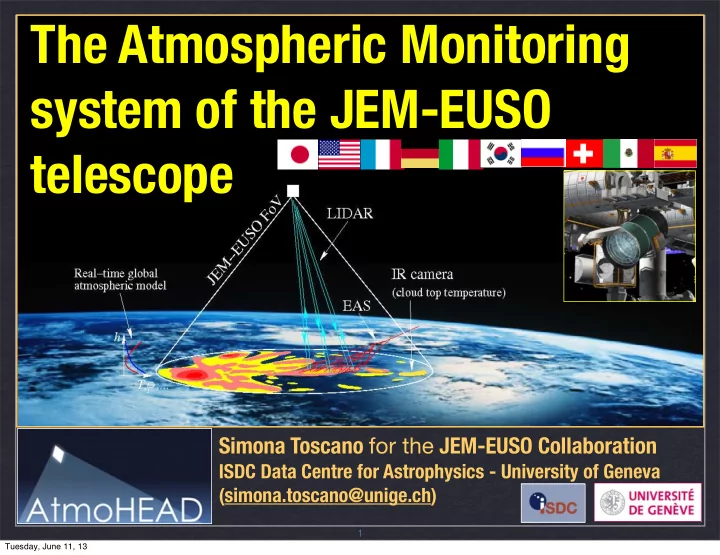
The Atmospheric Monitoring system of the JEM-EUSO telescope Simona Toscano for the JEM-EUSO Collaboration ISDC Data Centre for Astrophysics - University of Geneva (simona.toscano@unige.ch) 1 Tuesday, June 11, 13 Outline General
The Atmospheric Monitoring system of the JEM-EUSO telescope Simona Toscano for the JEM-EUSO Collaboration ISDC Data Centre for Astrophysics - University of Geneva (simona.toscano@unige.ch) 1 Tuesday, June 11, 13
Outline ๏ General introduction on JEM-EUSO physics ๏ Atmospheric Monitoring : • Infrared camera • LIDAR • Global atmospheric models (use of GDAS currently under study) • JEM-EUSO “slow-data” ( Continuous background photon counting) ๏ Conclusions 2 Tuesday, June 11, 13
Outline ๏ General introduction on JEM-EUSO physics ๏ Atmospheric Monitoring : • Infrared camera • Infrared camera • LIDAR • LIDAR • Global atmospheric models (use of GDAS currently under study) • Global atmospheric models (use of GDAS currently under study) • JEM-EUSO “slow-data” ( Continuous background photon counting) • JEM-EUSO “slow-data” ( Continuous background photon counting) ๏ Conclusions 2 Tuesday, June 11, 13
The cosmic ray spectrum from Lawrence’s talk on Monday Cosmic rays above ~10 18 -10 19 eV are believed to have extra- galactic origin. JEM-EUSO SCIENCE The highest observed cosmic ray energy is ~3x10 20 eV (10 8 times higher than LHC energy scale). It is above the GZK cutoff (due to interaction of UHCRs with CMB). Most of the candidate sources are incapable of accelerating particle beyond the GZK limit. The origin of UHECRs is still an open question. 3 Tuesday, June 11, 13
JEM-EUSO E xtreme U niverse S pace O bservatory on board the J apanese E xperiment M odule A new space-based (ISS) mission to study the origin and nature of UHECRs. Main objectives: • identification of UHECRs sources • study of acceleration and radiation process • source spectra Exploratory science: • Measurement of extreme energy gamma rays • Detection of extreme energy neutrinos • Structure of galactic magnetic field • Identification of relativity and quantum gravitational e ff ect • Study of atmospheric luminous phenomena 4 Tuesday, June 11, 13
Detection Principle Adams Jr.,J.H. et al. (2013), An evaluation of the exposure in nadir observation of the JEM-EUSO mission, Astroparticle Physics 44, 76-90 (2013) Detection of UV light emitted by EAS initiated by primary UHECRs hitting the Earth’s atmosphere (our detector) Fluorescence light (secondary electrons exciting N 2 ) emitted isotropically along the EAS track and observed directly. Cherenkov light is forward-beamed. It’s observed because of scattering and di ff use reflection ( Cherenkov mark ) Properties of UHECR particles (arrival direction, energy, type) are derived from the properties of the detected light. Photons flux at the entrance aperture: • 10 20 eV shower generates ~ 10 15 photons (thousands of them reaching the pupil) • fluorescence is the dominant component, with smaller contribution from reflected and back- scattered Cherenkov • energy can be determined with only small corrections for the Cherenkov component 5 Tuesday, June 11, 13
The Earth’s atmosphere Proper measurement of UHECRs properties can be achieved only knowing the condition of the detector (atmosphere). Intensity of the observed light depends on the transmittance (absorption and scattering properties) of the atmosphere, the cloud cover and clouds properties (height, optical depth...), and aerosols. MOLECULAR CIRRUS CLOUDS SCATTERING OPTICALLY THICK CLOUDS AEROSOL LAYERS LIDAR profile from the CALIPSO spacecraft, specifically the 523 nanometer Total Attenuated Backscatter. Credit: NASA Langley Research Center. 6 Tuesday, June 11, 13
The Earth’s atmosphere JEM-EUSO will experience all possible weather conditions (ISS moves with v~7 km/sec). State of the atmosphere is continuously changing in FoV. Variations of atmospheric conditions a ff ect: • the development of the EAS • amount of UV light produced along the EAS track • amount of UV light reaching the telescope. MOLECULAR CIRRUS CLOUDS SCATTERING OPTICALLY THICK CLOUDS AEROSOL LAYERS LIDAR profile from the CALIPSO spacecraft, specifically the 523 nanometer Total Attenuated Backscatter. Credit: NASA Langley Research Center. 7 Tuesday, June 11, 13
The A tmospheric M onitoring (AM) system The AM system will continuously monitor the atmosphere in JEM-EUSO FoV during data taking period. information on cloud cover and measurement of top INFRARED CAMERA: altitude of optically-thick clouds LIDAR: detection of thin clouds with and aerosol layers physical parameters of the atmosphere from weather GLOBAL MODELS: forecasting services such as NCEP , GMAO, ECWMF . SLOW MODE DATA: additional information on cloud distribution and intensity of the night sky airglow 8 Tuesday, June 11, 13
Goals of the AM system ALTITUDE (KM) TOVS DATA <3.2 3.2-6.5 6.5-10 >10 OPTICAL DEPTH 31% <0.1% <0.1% 1.2% <0.1 6.4% 2.0% 3.2% 5.0% 0.1-1 6.0% 3.0% 4.2% 2.5% 1-2 16% 6.0% 8.5% 5.0% >2 Only 30% of events will develop in clear sky Events occurring in the remaining 70% will be rejected if not corrected for the presence of clouds. Minimal task of the AM system: to provide a selection criteria for golden events (no detection of clouds from LIDAR or IR camera). More advanced: correction for cloud-a ff ected shower profiles for simple cases (i.e. low-altitude optically thick clouds). 9 Tuesday, June 11, 13
Goals of the AM system ALTITUDE (KM) TOVS DATA <3.2 3.2-6.5 6.5-10 >10 OPTICAL DEPTH 31% <0.1% <0.1% 1.2% <0.1 6.4% 2.0% 3.2% 5.0% 0.1-1 6.0% 3.0% 4.2% 2.5% 1-2 16% 6.0% 8.5% 5.0% >2 Only 30% of events will develop in clear sky Events occurring in the remaining 70% will be rejected if not corrected for the presence of clouds. Minimal task of the AM system: to provide a selection criteria for golden events (no detection of clouds from LIDAR or IR camera). More advanced: correction for cloud-a ff ected shower profiles for simple cases (i.e. low-altitude optically thick clouds). 9 Tuesday, June 11, 13
Requirements of the AM system Saez%et%al.%Proc.%TAUP%2011% H ¡= ¡2.5 ¡km, ¡𝜐 ¡= ¡5 H ¡= ¡10 ¡km, ¡𝜐 ¡= ¡0.05 PROFILE IN CLEAR SKY Cirrus case: signal attenuation according to the optical depth ( 𝜐 ) leads to an error in the estimation of the energy Stratus case: EAS observed w/o attenuation (cloud top below the region of development); strong Cherenkov reflection on the top of cloud instead of ground leads to an error in the geometry reconstruction and particle identification. General requirements on the precision of the UHECRs measurement ( ∆ E/E < 30%, X max < 120 g/cm 2 ) impose the requirements on the precision of the atmospheric measurement: • measurement accuracy of optical depth profile of the atmosphere around EAS: Δ 𝜐 ¡≤ ¡0.15 • cloud top altitude measurement accuracy: Δ H ≤ 500 m 10 Tuesday, June 11, 13
The I nfra R ed (IR) camera Towards the Preliminary Design Review of the Infrared Camera of the JEM-EUSO Space Mission, M.D. Rodriguez Frias for the JEM-EUSO Collaboration, ICRC proceedings 2013. Micro-bolometer based infrared imaging system for cloud coverage and cloud top altitude measurements. Three main blocks: • Telescope Assembly to acquire the IR radiation with a micro-bolometer and convert into digital counts; • Electronic Assembly to process and transmit the image, provide the electrical system, the thermal control and secure communication with the platform computer; • Calibration unit to assure the accuracy of the measurement. Challenging mechanical and thermal design to secure IR-Camera isolation. 11 Tuesday, June 11, 13
The I nfra R ed (IR) camera Towards the Preliminary Design Review of the Infrared Camera of the JEM-EUSO Space Mission, M.D. Rodriguez Frias for the JEM-EUSO Collaboration, ICRC proceedings 2013. Two approaches for Cloud Top Height (CTH) that can support each other: • radiometric methods based on the relationship between atmosphere temperature and altitude, extra info are necessary; • stereo vision techniques based only on geometrical relationships. 12 Tuesday, June 11, 13
The IR camera: radiometric methods No direct measurement : observed radiation is related to the cloud temperature and emissivity (L measured ➯ T retrieved ) (radiance is the measurement) The atmosphere between the emitter and the sensor absorbs and emits energy: L CLOUD ≠ L MEASURED T CLOUD ≠ T RETRIEVED Algorithms needed to infer the cloud temperature (T cloud ) from the temperature measured (T measured ) by the IR camera. Di ff erent clouds (emissivity, water and ice content...) need di ff erent algorithms (Split Window Algorithm, Look-Up Tables, Brightness Temperature Di ff erence). 13 Tuesday, June 11, 13
The IR camera: radiometric methods CLOUD TOP TEMPERATURE ERROR CLOUD&PHASE& SWA WITH MODIS&product& REAL DATA Red - Unknown Blue - Water Cyan - Ice Date: 16/05/2012. South Hemisphere Sur (Pacific Ocean) Hour: 09:55 UTC. Latitud [40S, 60S ] - Longitud [160W, 120W] Yellow - Mixed SWA is able to retrieve temperature with high accuracy (~1 K) for optically thick water clouds ( ε = 1) Work still in progress for thin clouds, broken clouds, clouds of ice [LUTs, BTD] 14 Tuesday, June 11, 13
Recommend



More recommend
Explore More Topics
Stay informed with curated content and fresh updates.