Territory partitioning is ... art Territory Partitioning for - PowerPoint PPT Presentation
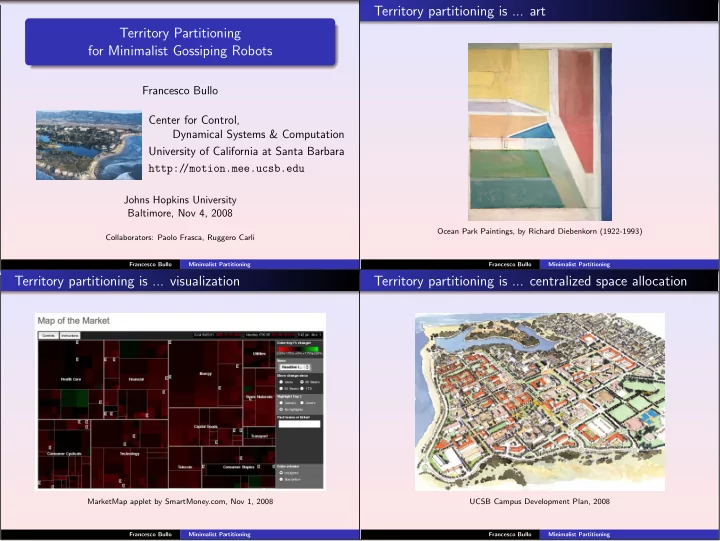
Territory partitioning is ... art Territory Partitioning for Minimalist Gossiping Robots Francesco Bullo Center for Control, Dynamical Systems & Computation University of California at Santa Barbara http:/ /motion.mee.ucsb.edu Johns
Territory partitioning is ... art Territory Partitioning for Minimalist Gossiping Robots Francesco Bullo Center for Control, Dynamical Systems & Computation University of California at Santa Barbara http:/ /motion.mee.ucsb.edu Johns Hopkins University Baltimore, Nov 4, 2008 Ocean Park Paintings, by Richard Diebenkorn (1922-1993) Collaborators: Paolo Frasca, Ruggero Carli Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning Territory partitioning is ... visualization Territory partitioning is ... centralized space allocation MarketMap applet by SmartMoney.com, Nov 1, 2008 UCSB Campus Development Plan, 2008 Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning
Territory partitioning is ... animal territory dynamics Territory partitioning is ... robotic load balancing Dynamic Vehicle Routing customers appear network provides service Tilapia mossambica, “Hexagonal Red harvester ants, “Optimization, Conflict, and Territories,” Barlow et al, ’74 Nonoverlapping Foraging Ranges,” Adler et al, ’03 Sage sparrows, “Territory dynamics in a sage sparrows E. Frazzoli and F. Bullo. Decentralized algorithms for vehicle routing in a stochastic population,” Petersen et al ’87 time-varying environment. In Proc CDC , pages 3357–3363, Paradise Island, Bahamas, December 2004 Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning Distributed partitioning+centering algorithm Multi-center optimization Partitioning+centering law take environment with density function φ : Q → R ≥ 0 At each comm round: place N robots at p = { p 1 , . . . , p N } 1: acquire neighbors’ positions partition environment into v = { v 1 , . . . , v N } 2: compute own dominance region define expected quadratic deviation 3: move towards centroid of own dominance region N � � J. Cort´ es, S. Mart´ ınez, T. Karatas, and F. Bullo. Coverage control for mobile sensing � q − p i � 2 φ ( q ) dq H ( v , p ) = networks. IEEE Trans Robotics & Automation , 20(2):243–255, 2004 v i i =1 Theorem (Lloyd ’57 “least-square quantization”) 1 at fixed partition, optimal positions are centroids 2 at fixed positions, optimal partition is Voronoi 3 Lloyd algorithm: alternate p-v optimization Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning
Today: partitioning with asynchronous peer-to-peer From standard to gossip algorithm Partitioning+centering law requires: 1 synchronous communication Standard partitioning+centering algorithm 2 communication along edges of dual graph 1 robot talks to all its neighbors in dual graph G1 2 robot computes its Voronoi region 3 robot moves to centroid of its Voronoi region Gossip partitioning policy 1 robot/region talks to only one neighboring robot/region 2 two regions are updated according to Minimalist robotics v + := � q ∈ v i ∪ v j | � q − centroid( v i ) � ≤ � q − centroid( v j ) � � is synchrony necessary? i is it sufficient to communicate peer-to-peer (gossip)? what are minimal requirements? Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning Gossip partitioning policy Simulations before meeting 1 Randomly chose two neighboring regions 2 Compute two centroids 3 Compute bisector of centroids 4 Partition two regions Implementation: centralized, General Polygon Clipper (GPC) library by bisector after meeting Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning
Technical challenges From standard to Lyapunov functions for partitions Standard coverage control robot i moves towards centroid of its Voronoi region 1 state space is not finite-dimensional N � non-convex disconnected polygons � � p i − x � 2 φ ( q ) dq H ( p 1 , . . . , p N ) = arbitrary number of vertices v i ( p 1 ,..., p N ) i =1 2 gossip map is not deterministic, ill-defined and discontinuous two regions could have same centroid Gossip coverage control disconnected/connected discontinuity 3 Lyapunov function missing region v i is modified to appear like a Voronoi region N � � � centroid( v i ) − x � 2 φ ( q ) dq H ( v 1 , . . . , v N ) = 4 motion protocol for deterministic/random meetings v i i =1 Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning Symmetric difference The space of partitions Given sets A , B , symmetric difference and distance are: Definition (space of N -partitions) V N is collections of N subsets of Q , v = { v i } N i =1 , such that A ∆ B = ( A ∪ B ) \ ( A ∩ B ) , d ∆ ( A , B ) = measure( A ∆ B ) 1 v i � = ∅ and v i = interior( v i ) 2 interior( v i ) ∩ interior( v j ) = ∅ if i � = j , and 3 � N i =1 v i = Q Theorem (space of partitions is metric and compact) V N with metric d ∆ ( u , v ) = � N i =1 d ∆ ( u i , v i ) is compact metric Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning
LaSalle invariance principle: persistent switches LaSalle invariance principle: persistent switches X is metric space X is metric space set-valued T : X ⇒ X with T ( x ) = { T i ( x ) } i ∈ I for finite I set-valued T : X ⇒ X with T ( x ) = { T i ( x ) } i ∈ I for finite I consider sequences { x n } n ≥ 0 ⊂ X with consider sequences { x n } n ≥ 0 ⊂ X with x n +1 ∈ T ( x n ) x n +1 ∈ T ( x n ) Assume: 1 W ⊂ X compact and positively invariant for T 2 U : W → R is non-decreasing along T 3 U and T i are continuous on W 4 for all i ∈ I , there are infinite m ∈ N such that x m +1 = T i ( x m ) Then x n → largest T -invariant subset of { x ∈ W | ∀ y ∈ T ( x ) , U ( y ) = U ( x ) } Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning LaSalle invariance principle: random switches Conclusions Summary X is metric space 1 novel gossip partitioning algorithm set-valued T : X ⇒ X with T ( x ) = { T i ( x ) } i ∈ I for finite I 2 space of partitions consider sequences { x n } n ≥ 0 ⊂ X with 3 LaSalle invariance principles x n +1 ∈ T ( x n ) 4 convergence to centroidal Voronoi partition Assume: P. Frasca, R. Carli, and F. Bullo. Gossip coverage control: dynamical systems on the 1 W ⊂ X compact and positively invariant for T space of partitions. In Proc ACC , St. Louis, MO, June 2009. Submitted 2 U : W → R is non-decreasing along T Ongoing work 3 U and T i are continuous on W 1 motion laws to maximize peer-to-peer meeting frequencies 4 random sequences with x n +1 = T i ( x n ) with probability p i 2 convergence rates: known in 1D; unknown in 2D Then almost surely 3 robots arriving/departing x n → largest T -invariant subset of 4 more general version of partitioning: { x ∈ W | ∀ y ∈ T ( x ) , U ( y ) = U ( x ) } nonsmooth, equitable, nonconvex, 3D Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning
“Distributed Control of Robotic Networks” Emerging discipline: robotic networks 1 intro to distributed algorithms network modeling (graph theory, synchronous network, ctrl+comm algorithm, task, complexity networks, and averaging algos) coordination algorithm 2 geometric models and geometric deployment, task allocation, boundary estimation optimization problems 3 model for robotic, relative Open problems sensing networks, and complexity 1 algorithmic design for minimalist robotic networks 4 algorithms for rendezvous, scalable, adaptive, asynchronous, agent arrival/departure deployment, boundary estimation tasks: search, exploration, identify and track 2 integrated coordination, communication, and estimation Status: Freely downloadable at 3 Very few results available on: http://coordinationbook.info scalability analysis: time/energy/communication/control 1 with tutorial slides and (ongoing) robotic networks over random geometric graphs 2 software libraries. To appear, complex sensing/actuation scenarios 3 Princeton University Press. Francesco Bullo Minimalist Partitioning Francesco Bullo Minimalist Partitioning
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.