Using this fact, one shows that T acts as a one cycle � � ℓ/ q k , ( ℓ + 1 ) / q k � , 0 ≤ ℓ < q k � permutation on the set of q -adic intervals of length q − k , and d ( x , T q k ( x )) < q − k for all x ∈ [ 0 , 1 ) (all points are positively recurrent). Example: q = 2. Setting x = � ∞ j = 0 x j 2 − j − 1 with x j ∈ { 0 , 1 } , we have T ( 0 . 111 . . . ) = 0 . 000 . . . and for k ≥ 1 T ( 0 . 11 . . . 1 0 x k x k + 1 . . . ) = 0 . 00 . . . 0 1 x k x k + 1 . . . � �� � � �� � k − 1 k − 1
Using this fact, one shows that T acts as a one cycle � � ℓ/ q k , ( ℓ + 1 ) / q k � , 0 ≤ ℓ < q k � permutation on the set of q -adic intervals of length q − k , and d ( x , T q k ( x )) < q − k for all x ∈ [ 0 , 1 ) (all points are positively recurrent). Example: q = 2. Setting x = � ∞ j = 0 x j 2 − j − 1 with x j ∈ { 0 , 1 } , we have T ( 0 . 111 . . . ) = 0 . 000 . . . and for k ≥ 1 T ( 0 . 11 . . . 1 0 x k x k + 1 . . . ) = 0 . 00 . . . 0 1 x k x k + 1 . . . � �� � � �� � k − 1 k − 1
Hence, for any f : X → R of bounded variation V ( f ) with µ ( f ) = 0 we have
Hence, for any f : X → R of bounded variation V ( f ) with µ ( f ) = 0 we have � S q k ( f ) � ∞ ≤ V ( f ) , ∀ k ≥ 0
Hence, for any f : X → R of bounded variation V ( f ) with µ ( f ) = 0 we have � S q k ( f ) � ∞ ≤ V ( f ) , ∀ k ≥ 0 which is a Denjoy-Koksma-like inequality for q -adic rotations. Note:
Hence, for any f : X → R of bounded variation V ( f ) with µ ( f ) = 0 we have � S q k ( f ) � ∞ ≤ V ( f ) , ∀ k ≥ 0 which is a Denjoy-Koksma-like inequality for q -adic rotations. Note: "rational approximations" of T - whose orbits are all periodic of period q k - are obtained by restricting U to finite subgroups Z / q k Z of Z q or, equivalently, by using the map T k which coincides with T but on the interval [ 1 − q − k , 1 ) , where it writes T k ( x ) := x − 1 + q − k .
Hence, for any f : X → R of bounded variation V ( f ) with µ ( f ) = 0 we have � S q k ( f ) � ∞ ≤ V ( f ) , ∀ k ≥ 0 which is a Denjoy-Koksma-like inequality for q -adic rotations. Note: "rational approximations" of T - whose orbits are all periodic of period q k - are obtained by restricting U to finite subgroups Z / q k Z of Z q or, equivalently, by using the map T k which coincides with T but on the interval [ 1 − q − k , 1 ) , where it writes T k ( x ) := x − 1 + q − k . Given q k ≤ n < q k + 1 , one writes n = � k i = 0 c i q i with 0 ≤ c i < q ,
Hence, for any f : X → R of bounded variation V ( f ) with µ ( f ) = 0 we have � S q k ( f ) � ∞ ≤ V ( f ) , ∀ k ≥ 0 which is a Denjoy-Koksma-like inequality for q -adic rotations. Note: "rational approximations" of T - whose orbits are all periodic of period q k - are obtained by restricting U to finite subgroups Z / q k Z of Z q or, equivalently, by using the map T k which coincides with T but on the interval [ 1 − q − k , 1 ) , where it writes T k ( x ) := x − 1 + q − k . Given q k ≤ n < q k + 1 , one writes n = � k i = 0 c i q i with 0 ≤ c i < q , and gets the upper bound: � S n ( f ) � ∞ ≤ ( q − 1 ) V ( f )( 1 + log q n )
For observables of the type f ( x ) := 2 ( χ [ 0 ,β ) ( x ) − β ) for some β ∈ ( 0 , 1 ) ,
For observables of the type f ( x ) := 2 ( χ [ 0 ,β ) ( x ) − β ) for some β ∈ ( 0 , 1 ) , there are at most 2 n different walks of length n ,
For observables of the type f ( x ) := 2 ( χ [ 0 ,β ) ( x ) − β ) for some β ∈ ( 0 , 1 ) , there are at most 2 n different walks of length n , but the precise number depends on β .
For observables of the type f ( x ) := 2 ( χ [ 0 ,β ) ( x ) − β ) for some β ∈ ( 0 , 1 ) , there are at most 2 n different walks of length n , but the precise number depends on β . In particular the number of walks of any length is bounded if β is a q -adic rational, i.e. β = ℓ/ q k .
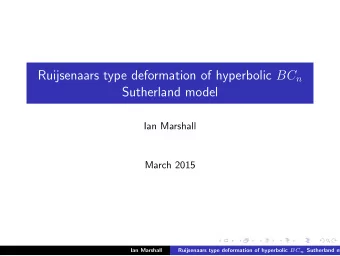
For observables of the type f ( x ) := 2 ( χ [ 0 ,β ) ( x ) − β ) for some β ∈ ( 0 , 1 ) , there are at most 2 n different walks of length n , but the precise number depends on β . In particular the number of walks of any length is bounded if β is a q -adic rational, i.e. β = ℓ/ q k . Finally, using elementary (number theoretical) methods (cf. H. Faure, 80’s), one can prove the existence of a subsequence n k ր ∞ for which one has the following
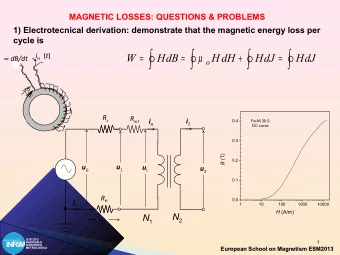
For observables of the type f ( x ) := 2 ( χ [ 0 ,β ) ( x ) − β ) for some β ∈ ( 0 , 1 ) , there are at most 2 n different walks of length n , but the precise number depends on β . In particular the number of walks of any length is bounded if β is a q -adic rational, i.e. β = ℓ/ q k . Finally, using elementary (number theoretical) methods (cf. H. Faure, 80’s), one can prove the existence of a subsequence n k ր ∞ for which one has the following � S n k ( f ) � ∞ ≥ C N log q ( n k ) ( β ) lower bound:
For observables of the type f ( x ) := 2 ( χ [ 0 ,β ) ( x ) − β ) for some β ∈ ( 0 , 1 ) , there are at most 2 n different walks of length n , but the precise number depends on β . In particular the number of walks of any length is bounded if β is a q -adic rational, i.e. β = ℓ/ q k . Finally, using elementary (number theoretical) methods (cf. H. Faure, 80’s), one can prove the existence of a subsequence n k ր ∞ for which one has the following � S n k ( f ) � ∞ ≥ C N log q ( n k ) ( β ) lower bound: where N c ( x ) is the number of pairs ( q − 1 , 0 ) or ( 0 , q − 1 ) among the first [ c ] terms of the q -adic expansion of x ∈ [ 0 , 1 ) .
3 2 1 50 100 150 200 � 1 � 2 q = 2 and β = 1 / 3 � S n k ( f ) � ∞ ≍ log q n k
The irrational rotation of the circle
The irrational rotation of the circle X = R / Z , µ = Lebesgue, T ( x ) := x + α ( mod 1 ) with α ∈ R \ Q .
The irrational rotation of the circle X = R / Z , µ = Lebesgue, T ( x ) := x + α ( mod 1 ) with α ∈ R \ Q . Let α = [ a 1 , a 2 , a 3 , . . . ] and p k / q k := [ a 1 , . . . , a k ] be its k -th (fast) convergent.
The irrational rotation of the circle X = R / Z , µ = Lebesgue, T ( x ) := x + α ( mod 1 ) with α ∈ R \ Q . Let α = [ a 1 , a 2 , a 3 , . . . ] and p k / q k := [ a 1 , . . . , a k ] be its k -th (fast) convergent. We have � � � ℓα − ℓ p k ℓ 1 � � � < < , 1 ≤ ℓ ≤ q k � � q k q k q k + 1 q k a k + 1
The irrational rotation of the circle X = R / Z , µ = Lebesgue, T ( x ) := x + α ( mod 1 ) with α ∈ R \ Q . Let α = [ a 1 , a 2 , a 3 , . . . ] and p k / q k := [ a 1 , . . . , a k ] be its k -th (fast) convergent. We have � � � ℓα − ℓ p k ℓ 1 � � � < < , 1 ≤ ℓ ≤ q k � � q k q k q k + 1 q k a k + 1 which yields the Denjoy-Koksma inequality (for f of bounded variation with µ ( f ) = 0):
The irrational rotation of the circle X = R / Z , µ = Lebesgue, T ( x ) := x + α ( mod 1 ) with α ∈ R \ Q . Let α = [ a 1 , a 2 , a 3 , . . . ] and p k / q k := [ a 1 , . . . , a k ] be its k -th (fast) convergent. We have � � � ℓα − ℓ p k ℓ 1 � � � < < , 1 ≤ ℓ ≤ q k � � q k q k q k + 1 q k a k + 1 which yields the Denjoy-Koksma inequality (for f of bounded variation with µ ( f ) = 0): � S q k ( f , α ) � ∞ ≤ V ( f ) ∀ k ≥ 1 ,
For q k ≤ n < q k + 1
For q k ≤ n < q k + 1 one has the Ostrowski representation: n = � k i = 0 c i q i
For q k ≤ n < q k + 1 one has the Ostrowski representation: n = � k i = 0 c i q i with 0 ≤ c i ≤ a i + 1
For q k ≤ n < q k + 1 one has the Ostrowski representation: n = � k i = 0 c i q i with 0 ≤ c i ≤ a i + 1 which yields the upper bound, k + 1 � � S n ( f , α ) � ∞ ≤ V ( f ) a i i = 1
For q k ≤ n < q k + 1 one has the Ostrowski representation: n = � k i = 0 c i q i with 0 ≤ c i ≤ a i + 1 which yields the upper bound, k + 1 � � S n ( f , α ) � ∞ ≤ V ( f ) a i i = 1 Set � x � := min {| x − p | : p ∈ Z } ,
For q k ≤ n < q k + 1 one has the Ostrowski representation: n = � k i = 0 c i q i with 0 ≤ c i ≤ a i + 1 which yields the upper bound, k + 1 � � S n ( f , α ) � ∞ ≤ V ( f ) a i i = 1 Set � x � := min {| x − p | : p ∈ Z } , so that � r α � = d ( x , T r x ) .
For q k ≤ n < q k + 1 one has the Ostrowski representation: n = � k i = 0 c i q i with 0 ≤ c i ≤ a i + 1 which yields the upper bound, k + 1 � � S n ( f , α ) � ∞ ≤ V ( f ) a i i = 1 Set � x � := min {| x − p | : p ∈ Z } , so that � r α � = d ( x , T r x ) . Definition: the type of α is the number r →∞ r s · � r α � = 0 } γ = sup { s : lim inf
For q k ≤ n < q k + 1 one has the Ostrowski representation: n = � k i = 0 c i q i with 0 ≤ c i ≤ a i + 1 which yields the upper bound, k + 1 � � S n ( f , α ) � ∞ ≤ V ( f ) a i i = 1 Set � x � := min {| x − p | : p ∈ Z } , so that � r α � = d ( x , T r x ) . Definition: the type of α is the number r →∞ r s · � r α � = 0 } γ = sup { s : lim inf ◮ γ ≥ 1
For q k ≤ n < q k + 1 one has the Ostrowski representation: n = � k i = 0 c i q i with 0 ≤ c i ≤ a i + 1 which yields the upper bound, k + 1 � � S n ( f , α ) � ∞ ≤ V ( f ) a i i = 1 Set � x � := min {| x − p | : p ∈ Z } , so that � r α � = d ( x , T r x ) . Definition: the type of α is the number r →∞ r s · � r α � = 0 } γ = sup { s : lim inf ◮ γ ≥ 1 ◮ { γ = 1 } ⊃ { α = [ a 1 , a 2 , a 3 , . . . ] : a i = O ( 1 ) , ∀ i ≥ 1 } .
For q k ≤ n < q k + 1 one has the Ostrowski representation: n = � k i = 0 c i q i with 0 ≤ c i ≤ a i + 1 which yields the upper bound, k + 1 � � S n ( f , α ) � ∞ ≤ V ( f ) a i i = 1 Set � x � := min {| x − p | : p ∈ Z } , so that � r α � = d ( x , T r x ) . Definition: the type of α is the number r →∞ r s · � r α � = 0 } γ = sup { s : lim inf ◮ γ ≥ 1 ◮ { γ = 1 } ⊃ { α = [ a 1 , a 2 , a 3 , . . . ] : a i = O ( 1 ) , ∀ i ≥ 1 } . � � � α − p q s + 2 , ∀ p C ◮ If η = sup { s : � � � < q } > 0 then γ = 1 + η . q
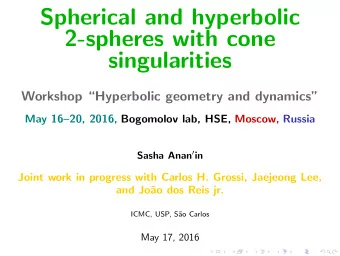
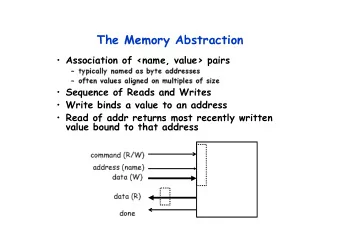
For q k ≤ n < q k + 1 one has the Ostrowski representation: n = � k i = 0 c i q i with 0 ≤ c i ≤ a i + 1 which yields the upper bound, k + 1 � � S n ( f , α ) � ∞ ≤ V ( f ) a i i = 1 Set � x � := min {| x − p | : p ∈ Z } , so that � r α � = d ( x , T r x ) . Definition: the type of α is the number r →∞ r s · � r α � = 0 } γ = sup { s : lim inf ◮ γ ≥ 1 ◮ { γ = 1 } ⊃ { α = [ a 1 , a 2 , a 3 , . . . ] : a i = O ( 1 ) , ∀ i ≥ 1 } . � � � α − p q s + 2 , ∀ p C ◮ If η = sup { s : � � � < q } > 0 then γ = 1 + η . q Example: a i = 2 2 i ⇒ γ = 2.
√ r · � r α � vs r for α = ( 5 − 1 ) / 2
We have the following
We have the following Theorem.
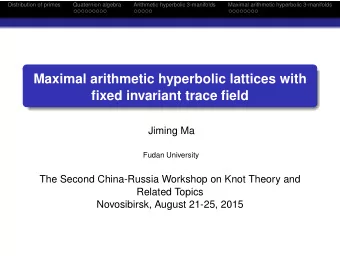
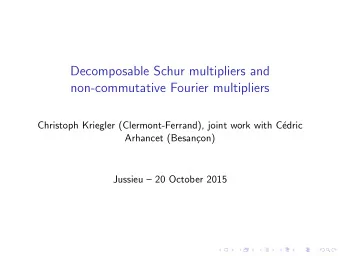
We have the following Theorem. ◮ If a i = O ( 1 ) then � S n ( f , α ) � ∞ = O ( log n ) .
We have the following Theorem. ◮ If a i = O ( 1 ) then � S n ( f , α ) � ∞ = O ( log n ) . � � 1 n 1 − γ + ǫ log n ◮ If α is of type γ ≥ 1 then � S n ( f , α ) � ∞ = O , ∀ ǫ > 0.
We have the following Theorem. ◮ If a i = O ( 1 ) then � S n ( f , α ) � ∞ = O ( log n ) . � � 1 n 1 − γ + ǫ log n ◮ If α is of type γ ≥ 1 then � S n ( f , α ) � ∞ = O , ∀ ǫ > 0. ◮ particular cases
1 50 100 150 200 � 1 � 2 � 3 √ S n vs n for α = ( 5 − 1 ) / 2, with a i = 1, ∀ i ≥ 1, and f ( x ) = 2 χ [ 0 , 1 / 2 ) ( x ) − 1 � S n ( f , α ) � ∞ = O ( log n )
2 1 50 100 150 200 � 1 � 2 � 3 � 4 S n vs n for α = e − 2, with a i = 2 l for i = 3 l − 1, l ≥ 1, and a i = 1 otherwise ( f as before). � S n ( f , α ) � ∞ = O ( log 2 n / log 2 log n )
Growth in L 2 : dispersion
Growth in L 2 : dispersion For f ∈ L 2 ( X , µ ) with µ ( f ) = 0 set
Growth in L 2 : dispersion For f ∈ L 2 ( X , µ ) with µ ( f ) = 0 set DS n := � S n ( f , α ) � 2 2 ≡ µ ( S 2 n ) .
Growth in L 2 : dispersion For f ∈ L 2 ( X , µ ) with µ ( f ) = 0 set DS n := � S n ( f , α ) � 2 2 ≡ µ ( S 2 n ) . Note:
Growth in L 2 : dispersion For f ∈ L 2 ( X , µ ) with µ ( f ) = 0 set DS n := � S n ( f , α ) � 2 2 ≡ µ ( S 2 n ) . Note: to get non trivial behaviour we must avoid that f = g ◦ T − g for some g ∈ L 2 ( X , µ ) .
Growth in L 2 : dispersion For f ∈ L 2 ( X , µ ) with µ ( f ) = 0 set DS n := � S n ( f , α ) � 2 2 ≡ µ ( S 2 n ) . Note: to get non trivial behaviour we must avoid that f = g ◦ T − g for some g ∈ L 2 ( X , µ ) . Some basic spectral theory
Growth in L 2 : dispersion For f ∈ L 2 ( X , µ ) with µ ( f ) = 0 set DS n := � S n ( f , α ) � 2 2 ≡ µ ( S 2 n ) . Note: to get non trivial behaviour we must avoid that f = g ◦ T − g for some g ∈ L 2 ( X , µ ) . Some basic spectral theory � 1 ◮ ρ ( k ) := µ ( f · f ◦ T k ) = 0 e 2 π ik λ σ f ( d λ ) , where the measure σ f on ( 0 , 1 ] is the spectral type of f , and
Growth in L 2 : dispersion For f ∈ L 2 ( X , µ ) with µ ( f ) = 0 set DS n := � S n ( f , α ) � 2 2 ≡ µ ( S 2 n ) . Note: to get non trivial behaviour we must avoid that f = g ◦ T − g for some g ∈ L 2 ( X , µ ) . Some basic spectral theory � 1 ◮ ρ ( k ) := µ ( f · f ◦ T k ) = 0 e 2 π ik λ σ f ( d λ ) , where the measure σ f on ( 0 , 1 ] is the spectral type of f , and � 1 n − 1 � DS n = ( n − | k | ) ρ ( k ) = Φ n ( λ ) σ f ( d λ ) , 0 k = − n + 1
Growth in L 2 : dispersion For f ∈ L 2 ( X , µ ) with µ ( f ) = 0 set DS n := � S n ( f , α ) � 2 2 ≡ µ ( S 2 n ) . Note: to get non trivial behaviour we must avoid that f = g ◦ T − g for some g ∈ L 2 ( X , µ ) . Some basic spectral theory � 1 ◮ ρ ( k ) := µ ( f · f ◦ T k ) = 0 e 2 π ik λ σ f ( d λ ) , where the measure σ f on ( 0 , 1 ] is the spectral type of f , and � 1 n − 1 � DS n = ( n − | k | ) ρ ( k ) = Φ n ( λ ) σ f ( d λ ) , 0 k = − n + 1 with Φ n ( λ ) = Φ n ( 1 − λ ) := sin 2 ( n πλ ) / sin 2 ( πλ ) .
Growth in L 2 : dispersion For f ∈ L 2 ( X , µ ) with µ ( f ) = 0 set DS n := � S n ( f , α ) � 2 2 ≡ µ ( S 2 n ) . Note: to get non trivial behaviour we must avoid that f = g ◦ T − g for some g ∈ L 2 ( X , µ ) . Some basic spectral theory � 1 ◮ ρ ( k ) := µ ( f · f ◦ T k ) = 0 e 2 π ik λ σ f ( d λ ) , where the measure σ f on ( 0 , 1 ] is the spectral type of f , and � 1 n − 1 � DS n = ( n − | k | ) ρ ( k ) = Φ n ( λ ) σ f ( d λ ) , 0 k = − n + 1 with Φ n ( λ ) = Φ n ( 1 − λ ) := sin 2 ( n πλ ) / sin 2 ( πλ ) . � n − 1 ◮ � DS n � := 1 k = 0 DS k satisfies (finite or infinite) n
Growth in L 2 : dispersion For f ∈ L 2 ( X , µ ) with µ ( f ) = 0 set DS n := � S n ( f , α ) � 2 2 ≡ µ ( S 2 n ) . Note: to get non trivial behaviour we must avoid that f = g ◦ T − g for some g ∈ L 2 ( X , µ ) . Some basic spectral theory � 1 ◮ ρ ( k ) := µ ( f · f ◦ T k ) = 0 e 2 π ik λ σ f ( d λ ) , where the measure σ f on ( 0 , 1 ] is the spectral type of f , and � 1 n − 1 � DS n = ( n − | k | ) ρ ( k ) = Φ n ( λ ) σ f ( d λ ) , 0 k = − n + 1 with Φ n ( λ ) = Φ n ( 1 − λ ) := sin 2 ( n πλ ) / sin 2 ( πλ ) . � n − 1 ◮ � DS n � := 1 k = 0 DS k satisfies (finite or infinite) n � 1 ( 2 sin 2 ( πλ )) − 1 σ f ( d λ ) n →∞ � DS n � = lim 0
The α -rotation has eigenvalues λ r = e 2 π i r α with eigenvectors e r ( x ) = e 2 π i r x ,
The α -rotation has eigenvalues λ r = e 2 π i r α with eigenvectors e r ( x ) = e 2 π i r x , hence
The α -rotation has eigenvalues λ r = e 2 π i r α with eigenvectors e r ( x ) = e 2 π i r x , hence � | f r | 2 δ ( λ − { r α } ) d λ σ f ( d λ ) = , f r = ( f , e r ) r ∈ Z
The α -rotation has eigenvalues λ r = e 2 π i r α with eigenvectors e r ( x ) = e 2 π i r x , hence � | f r | 2 δ ( λ − { r α } ) d λ σ f ( d λ ) = , f r = ( f , e r ) r ∈ Z and � | f r | 2 Φ n ( � r α � ) DS n = r ∈ Z
The α -rotation has eigenvalues λ r = e 2 π i r α with eigenvectors e r ( x ) = e 2 π i r x , hence � | f r | 2 δ ( λ − { r α } ) d λ σ f ( d λ ) = , f r = ( f , e r ) r ∈ Z and � | f r | 2 Φ n ( � r α � ) DS n = r ∈ Z Some consequences:
The α -rotation has eigenvalues λ r = e 2 π i r α with eigenvectors e r ( x ) = e 2 π i r x , hence � | f r | 2 δ ( λ − { r α } ) d λ σ f ( d λ ) = , f r = ( f , e r ) r ∈ Z and � | f r | 2 Φ n ( � r α � ) DS n = r ∈ Z Some consequences: for all α ∈ R \ Q
The α -rotation has eigenvalues λ r = e 2 π i r α with eigenvectors e r ( x ) = e 2 π i r x , hence � | f r | 2 δ ( λ − { r α } ) d λ σ f ( d λ ) = , f r = ( f , e r ) r ∈ Z and � | f r | 2 Φ n ( � r α � ) DS n = r ∈ Z Some consequences: for all α ∈ R \ Q DS n → 0 along the subsequence n = q k , k → ∞ . ◮
The α -rotation has eigenvalues λ r = e 2 π i r α with eigenvectors e r ( x ) = e 2 π i r x , hence � | f r | 2 δ ( λ − { r α } ) d λ σ f ( d λ ) = , f r = ( f , e r ) r ∈ Z and � | f r | 2 Φ n ( � r α � ) DS n = r ∈ Z Some consequences: for all α ∈ R \ Q DS n → 0 along the subsequence n = q k , k → ∞ . ◮ lim n →∞ � DS n � = ∞ . ◮
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries