State Machine for GPRS MM READY timer expiry or GPRS Attach Force - PowerPoint PPT Presentation
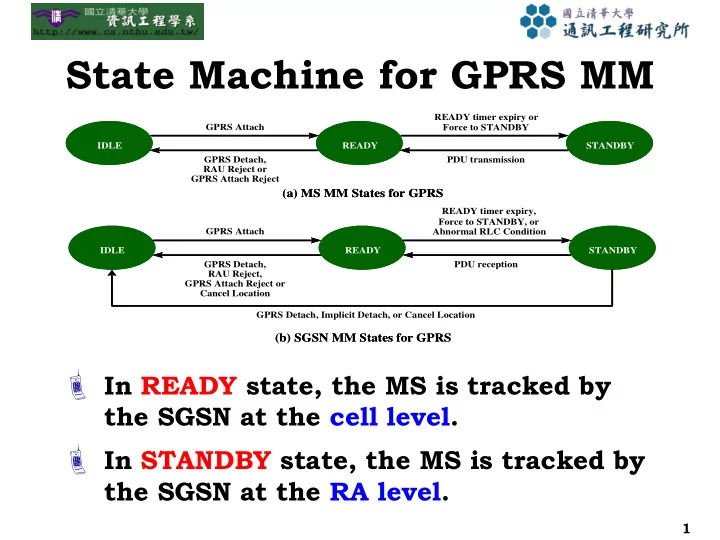
State Machine for GPRS MM READY timer expiry or GPRS Attach Force to STANDBY IDLE IDLE READY READY STANDBY STANDBY GPRS Detach, PDU transmission RAU Reject or GPRS Attach Reject (a) MS MM States for GPRS (a) MS MM States for GPRS
State Machine for GPRS MM READY timer expiry or GPRS Attach Force to STANDBY IDLE IDLE READY READY STANDBY STANDBY GPRS Detach, PDU transmission RAU Reject or GPRS Attach Reject (a) MS MM States for GPRS (a) MS MM States for GPRS READY timer expiry, Force to STANDBY, or GPRS Attach Abnormal RLC Condition IDLE IDLE READY READY STANDBY STANDBY GPRS Detach, PDU reception RAU Reject, GPRS Attach Reject or Cancel Location GPRS Detach, Implicit Detach, or Cancel Location (b) SGSN MM States for GPRS (b) SGSN MM States for GPRS In READY state, the MS is tracked by the SGSN at the cell level. In STANDBY state, the MS is tracked by the SGSN at the RA level. 1
Location Update vs. Paging Transitions between cell and RA trackings determine the location update and paging signaling costs. Cell Tracking RA Tracking SGSN SGSN High paging cost Low paging cost Location update Location update Low location update cost High location update cost RA changed Cell changed RA 2
READY Timer Mechanism 3GPP TS 23.060 proposed the READY Timer (RT) approach, where an RT threshold T is defined. t p t 1 t 2 t 3 t 4 t i t i+1 t i+2 t i+3 t i+4 t i+5 t Nc . . . . . . . . . time t 0 t 1 ... ... the end of the beginning of Ready timer T the previous the next expiration packet transmission packet transmission Cell Updates RA Updates Drawbacks of the RT approach The RT approach has a major fallacy that the RT timers in both the MS and the SGSN are independent and thus may lose synchronization. When the MS mobility rate changes from time to time, the RT timer can not adapt to the change. 3
READY Counter Mechanism To resolve the drawbacks of the RT approach, we propose the READY Counter (RC) approach. t p t m,1 t m,2 t m,3 t m,4 t m,K t m,K+1 t m,K+2 t m,K+3 t m,K+4 t m,K+5 t m,Nc . . . . . . . . . time t 0 t 1 ... ... the end of the beginning of Threshold K the previous the next packet transmission packet transmission K Cell Updates Nu-K RA Updates In the RC approach, an RC counter counts the number of cell movements in the packet idle period. If the number of movements reaches a threshold K , then the MS is switched from cell tracking to RA tracking. 4
Comparison of RC and RT (1) Mix two types of user mobility patterns Type I pattern: mobility rate λ m ’ = 1/500min Type II pattern: mobility rate λ m ’’ = 1/5min Consider 1,000,000 packet idle periods with mean 100min, in which Type I pattern is exercised with probability 0.5, and Type II pattern is exercised with probability 0.5. Let the expected signaling cost of location update and paging in a packet idle period be C T ’ for Type I pattern, and C T ’’ for Type II pattern. 5
Comparison of RC and RT (2) In RC (E[t p ] = 100min, E[t m ’] = 500min, E[t m ’’] = 5min) the lowest C T ’ is expected when K ≥ 2 the lowest C T ’’ is expected when K = 0 good performance can be expected when K = 1 or 2 In RT (E[t p ] = 100min, E[t m ’] = 500min, E[t m ’’] = 5min) the best threshold value for C T ’ occurs when T > 100min the best threshold value for C T ’’ occurs when T < 5min no T value will satisfy both patterns 6
Optimal Threshold K Calculation t p 1 2 3 i-1 i i+1 i+2 i+3 i+4 Nc . . . . . . . . . time t 0 t 1 ... the end of the beginning of the previous the next packet transmission packet transmission RA Crossings The net cost in t p includes location update cost during t p and paging cost (if needed) on t 1 . 7
Proof for Theorem 1 t p 1 2 3 i-1 i i+1 i+2 i+3 i+4 Nc . . . . . . . . . . time t 0 t 1 ... the end of the beginning of the previous the next packet transmission packet transmission RA Crossings If K > N c , C T ( K ) = C T ( N c +1 ) = … = C T (∞) = UN c If K ≤ N c , C T ( K ) = U [ K + N r ( K )]+ SV N r (0) - N r ( K ) ≤ K ↔ N r (0) ≤ K + N r ( K ) C T ( K ) = U [ K + N r ( K )]+ SV ≥ U [0+ N r (0)] + SV = C T (0) K* = 0 or K* = N c +1. 8
Dynamic READY Counter (DRC) Algorithm t p (1) t p (2) t p (3) t p (4) t p (i-3) t p (i-2) t p (i-1) t p (i) t p (i+1) t p (i+2) . . . . . . . . . time K(1) K(2) K(3) K(4) K(i-3) K(i-2) K(i-1) K Average of the previous M optimal K values 9
Performance of DRC Case 1 (randomness): consider 1,000,000 periods, mean 9 cell crossings in a packet idle period with prob. 0.5 mean 20 cell crossings with prob. 0.5 Case 2 (locality): mean 9 cell crossings for the first 500,000 periods mean 20 cell crossings for the last 500,000 periods Case 1 Case 2 (RA size = 37 cells; 1 location update cost : 1 paging cost = 4:1) 10
Summary We proposed READY Counter (RC) to resolve the fallacies of READY Timer (RT). We devised an adaptive algorithm dynamic RC (DRC) to reduce the net cost of location update and paging. We proposed analytic and simulation models to investigate RT, RC and DRC. We provided numerical examples to show how to select appropriate operation parameters. 11
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.