Stakeholder Cooperation for Improved Predictability and Lower Cost - PowerPoint PPT Presentation
Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services Joen Dahlberg, Ta/ana Polishchuk, Valen/n Polishchuk, Chris&ane Schmidt 2 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved
• Input: Aircraft movements at each airport from Demand Data Repository (DDR) hosted by EUROCONTROL • Split the time into 5-min intervals, called slots , and put every flight into its slot ➡ Input matrix F: ❖ Row per airport (a) ❖ Column per each slot (s) ❖ F as = 1 if a movement happens at airport a at time slot s ❖ F as = 0 otherwise • Conflict: two movements during the same slot in different airports (in F: two 1s in the same column) • Conflicting airports should never be assigned to the same RTM 4 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
• Output: Shifted flights and Airport-to-RTM assignment 5 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
• Output: Shifted flights and Airport-to-RTM assignment • Goal: ”small” shifts to the flight schedules → decreased number of required RTMs 5 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
• Output: Shifted flights and Airport-to-RTM assignment • Goal: ”small” shifts to the flight schedules → decreased number of required RTMs • Measure for shift? 5 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
• Output: Shifted flights and Airport-to-RTM assignment • Goal: ”small” shifts to the flight schedules → decreased number of required RTMs • Measure for shift? ❖ Maximum slot shift Δ (in minutes; multiple of 5, as we shift only by whole slots) 5 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
• Output: Shifted flights and Airport-to-RTM assignment • Goal: ”small” shifts to the flight schedules → decreased number of required RTMs • Measure for shift? ❖ Maximum slot shift Δ (in minutes; multiple of 5, as we shift only by whole slots) ❖ Number of shifts S 5 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
• Output: Shifted flights and Airport-to-RTM assignment • Goal: ”small” shifts to the flight schedules → decreased number of required RTMs • Measure for shift? ❖ Maximum slot shift Δ (in minutes; multiple of 5, as we shift only by whole slots) ❖ Number of shifts S • MAP = maximum number of airports per module 5 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP • Total number of modules, M 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP • Total number of modules, M Find: New slots for the flights and an assignment of airports to RTMs such that 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP • Total number of modules, M Find: New slots for the flights and an assignment of airports to RTMs such that • At most S flights are moved 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP • Total number of modules, M Find: New slots for the flights and an assignment of airports to RTMs such that • At most S flights are moved • Each flight is moved by at most Δ 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP • Total number of modules, M Find: New slots for the flights and an assignment of airports to RTMs such that • At most S flights are moved • Each flight is moved by at most Δ • No conflicting airports are assigned to the same RTM 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP • Total number of modules, M Find: New slots for the flights and an assignment of airports to RTMs such that • At most S flights are moved • Each flight is moved by at most Δ • No conflicting airports are assigned to the same RTM • At most MAP airports are assigned per module 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP • Total number of modules, M Find: New slots for the flights and an assignment of airports to RTMs such that • At most S flights are moved • Each flight is moved by at most Δ • No conflicting airports are assigned to the same RTM • At most MAP airports are assigned per module • At most M modules are used 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision problem Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP • Total number of modules, M Find: New slots for the flights and an assignment of airports to RTMs such that • At most S flights are moved • Each flight is moved by at most Δ • No conflicting airports are assigned to the same RTM • At most MAP airports are assigned per module • At most M modules are used 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision problem Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP • Total number of modules, M Find: New slots for the flights and an assignment of airports to RTMs such that • At most S flights are moved • Each flight is moved by at most Δ • No conflicting airports are assigned to the same RTM • At most MAP airports are assigned per module • At most M modules are used For optimisation problem: Move one constraint in objective function 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision problem Formal problem definition: Flights Rescheduling and Airport-to-Module Assignment (FRAMA) Given: • Flight slots in a set of airports (the matrix F) • Maximum allowable shift of a flight • Maximum total number of allowable shifts, S • Maximum number of airports per RTM, MAP • Total number of modules, M Find: New slots for the flights and an assignment of airports to RTMs such that • At most S flights are moved • Each flight is moved by at most Δ • No conflicting airports are assigned to the same RTM • At most MAP airports are assigned per module • At most M modules are used For optimisation problem: Move one constraint in objective function For us: Minimize number M of used RTMs, while respecting the bounds Δ , S, MAP 6 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Problem Complexity 7 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: • One airport per vertex → F has |V| rows 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: • One airport per vertex → F has |V| rows • Time slot per non-existing edge in G (that is per edge in the G’s complement) 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: • One airport per vertex → F has |V| rows • Time slot per non-existing edge in G (that is per edge in the G’s complement) G c =(V,E c ) complete graph on V 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: • One airport per vertex → F has |V| rows • Time slot per non-existing edge in G (that is per edge in the G’s complement) G c =(V,E c ) complete graph on V → |E c \E| time slots 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: • One airport per vertex → F has |V| rows • Time slot per non-existing edge in G (that is per edge in the G’s complement) G c =(V,E c ) complete graph on V → |E c \E| time slots • For time slot corresponding to e c ={v,w} ∈ E c \E we add two 1’s to the time slot column: to the airports of v and w, all other entries in that column are 0’s. 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: • One airport per vertex → F has |V| rows • Time slot per non-existing edge in G (that is per edge in the G’s complement) G c =(V,E c ) complete graph on V → |E c \E| time slots • For time slot corresponding to e c ={v,w} ∈ E c \E we add two 1’s to the time slot column: to the airports of v and w, all other entries in that column are 0’s. Any solution to FRAMA with Δ =0 and MAP=3 groups the airports (vertices) into triples, such that there are no conflicts between any of the three airports in a triple, that is, such that there is an edge between any of the three vertices in the triple. 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: • One airport per vertex → F has |V| rows • Time slot per non-existing edge in G (that is per edge in the G’s complement) G c =(V,E c ) complete graph on V → |E c \E| time slots • For time slot corresponding to e c ={v,w} ∈ E c \E we add two 1’s to the time slot column: to the airports of v and w, all other entries in that column are 0’s. Any solution to FRAMA with Δ =0 and MAP=3 groups the airports (vertices) into triples, such that there are no conflicts between any of the three airports in a triple, that is, such that there is an edge between any of the three vertices in the triple. 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: • One airport per vertex → F has |V| rows • Time slot per non-existing edge in G (that is per edge in the G’s complement) G c =(V,E c ) complete graph on V → |E c \E| time slots • For time slot corresponding to e c ={v,w} ∈ E c \E we add two 1’s to the time slot column: to the airports of v and w, all other entries in that column are 0’s. Any solution to FRAMA with Δ =0 and MAP=3 groups the airports (vertices) into triples, such that there are no conflicts between any of the three airports in a triple, that is, such that there is an edge between any of the three vertices in the triple. 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: • One airport per vertex → F has |V| rows • Time slot per non-existing edge in G (that is per edge in the G’s complement) G c =(V,E c ) complete graph on V → |E c \E| time slots • For time slot corresponding to e c ={v,w} ∈ E c \E we add two 1’s to the time slot column: to the airports of v and w, all other entries in that column are 0’s. Any solution to FRAMA with Δ =0 and MAP=3 groups the airports (vertices) into triples, such that there are no conflicts between any of the three airports in a triple, that is, such that there is an edge between any of the three vertices in the triple. ➡ We would obtain a solution to PIT 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: FRAMA is NP-complete, even if Δ = 0 and MAP=3. Proof: Reduction from Partition into Triangles (PIT) • Graph G = (V,E) (of maximum degree four) • Can V be partitioned into triples V 1 ,V 2 ,…,,V |V|/3 , such that each V i forms a triangle in G (for each triple of vertices V i each vertex in V i is connected to both other vertices in V i )? Given an instance of PIT (graph G = (V,E) with max degree four) we construct the matrix F, the input of FRAMA: • One airport per vertex → F has |V| rows • Time slot per non-existing edge in G (that is per edge in the G’s complement) G c =(V,E c ) complete graph on V → |E c \E| time slots • For time slot corresponding to e c ={v,w} ∈ E c \E we add two 1’s to the time slot column: to the airports of v and w, all other entries in that column are 0’s. Any solution to FRAMA with Δ =0 and MAP=3 groups the airports (vertices) into triples, such that there are no conflicts between any of the three airports in a triple, that is, such that there is an edge between any of the three vertices in the triple. ➡ We would obtain a solution to PIT Solution to FRAMA with Δ =0 (and, thus, S = 0) and MAP= 3 can be verified in polytime. 8 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
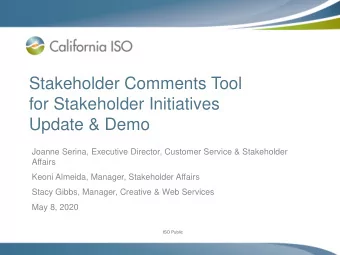
Theorem: For Δ = 0 and MAP=2 Minimizing the number of modules is equivalent to finding a maximum matching in the airport conflict graph (vertex for every airport and an edge between two airports if they can be put into the same module). 9 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: For Δ = 0 and MAP=2 Minimizing the number of modules is equivalent to finding a maximum matching in the airport conflict graph (vertex for every airport and an edge between two airports if they can be put into the same module). Maximum matching can be found in polynomial time. 9 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: For Δ = 0 and MAP=2 Minimizing the number of modules is equivalent to finding a maximum matching in the airport conflict graph (vertex for every airport and an edge between two airports if they can be put into the same module). Maximum matching can be found in polynomial time. 9 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: For Δ = 0 and MAP=2 Minimizing the number of modules is equivalent to finding a maximum matching in the airport conflict graph (vertex for every airport and an edge between two airports if they can be put into the same module). Maximum matching can be found in polynomial time. No edge, as AP1 and AP2 are in conflict 9 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: For Δ = 0 and MAP=2 Minimizing the number of modules is equivalent to finding a maximum matching in the airport conflict graph (vertex for every airport and an edge between two airports if they can be put into the same module). Maximum matching can be found in polynomial time. No edge, as AP1 and AP2 are in conflict 9 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: For Δ = 0 and MAP=2 Minimizing the number of modules is equivalent to finding a maximum matching in the airport conflict graph (vertex for every airport and an edge between two airports if they can be put into the same module). Maximum matching can be found in polynomial time. No edge, as AP1 and AP2 are in conflict module 1 9 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: For Δ = 0 and MAP=2 Minimizing the number of modules is equivalent to finding a maximum matching in the airport conflict graph (vertex for every airport and an edge between two airports if they can be put into the same module). Maximum matching can be found in polynomial time. No edge, as AP1 and AP2 are in conflict module 1 module 2 9 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Theorem: For Δ = 0 and MAP=2 Minimizing the number of modules is equivalent to finding a maximum matching in the airport conflict graph (vertex for every airport and an edge between two airports if they can be put into the same module). Maximum matching can be found in polynomial time. module 3 No edge, as AP1 and AP2 are in conflict module 1 module 2 9 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot • Edge weight: 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot • Edge weight: - 0, for edge between flight f and its original slot (black edges) 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot • Edge weight: - 0, for edge between flight f and its original slot (black edges) - 1, otherwise (gray edges) 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot • Edge weight: - 0, for edge between flight f and its original slot (black edges) - 1, otherwise (gray edges) • Find the minimum-weight matching in the graph that matches all flights 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot • Edge weight: - 0, for edge between flight f and its original slot (black edges) - 1, otherwise (gray edges) • Find the minimum-weight matching in the graph that matches all flights • If no such matching exists, Δ must be increased 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot • Edge weight: - 0, for edge between flight f and its original slot (black edges) - 1, otherwise (gray edges) • Find the minimum-weight matching in the graph that matches all flights • If no such matching exists, Δ must be increased • We can also minimize the total amount of shifted minutes: set the weight of each edge equal to the length of the shift 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot • Edge weight: - 0, for edge between flight f and its original slot (black edges) - 1, otherwise (gray edges) • Find the minimum-weight matching in the graph that matches all flights • If no such matching exists, Δ must be increased • We can also minimize the total amount of shifted minutes: set the weight of each edge equal to the length of the shift Runs in polynomial time, but may find suboptimal solutions to FRAMA (not necessary to remove all the conflicts) 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot • Edge weight: - 0, for edge between flight f and its original slot (black edges) - 1, otherwise (gray edges) • Find the minimum-weight matching in the graph that matches all flights • If no such matching exists, Δ must be increased • We can also minimize the total amount of shifted minutes: set the weight of each edge equal to the length of the shift Runs in polynomial time, but may find suboptimal solutions to FRAMA (not necessary to remove all the conflicts) For a small number of airports: enumerate all pairs of airports 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot • Edge weight: - 0, for edge between flight f and its original slot (black edges) - 1, otherwise (gray edges) • Find the minimum-weight matching in the graph that matches all flights • If no such matching exists, Δ must be increased • We can also minimize the total amount of shifted minutes: set the weight of each edge equal to the length of the shift Runs in polynomial time, but may find suboptimal solutions to FRAMA (not necessary to remove all the conflicts) For a small number of airports: enumerate all pairs of airports completely eliminate all conflicts for the given pairs (matching) with a given Δ > 0 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Complexity for Δ > 0 and MAP=2 unknown. Possible heuristic: • First remove all conflicts • Then assign airports to RTMs ➡ Solve rescheduling and assignment problem separately Assignment problem is trivial in the absence of conflicts (the airports are arbitrarily packed into the RTMs, with MAP airports per module) ➡ How to deconflict flight schedule? We can reduce deconfliction problem to matching: • Bipartite graph: all flights in one part and all slots in the other part • Flight f is connected to all slots within distance Δ /5 from its original slot • Edge weight: - 0, for edge between flight f and its original slot (black edges) - 1, otherwise (gray edges) • Find the minimum-weight matching in the graph that matches all flights • If no such matching exists, Δ must be increased • We can also minimize the total amount of shifted minutes: set the weight of each edge equal to the length of the shift Runs in polynomial time, but may find suboptimal solutions to FRAMA (not necessary to remove all the conflicts) For a small number of airports: enumerate all pairs of airports completely eliminate all conflicts for the given pairs (matching) with a given Δ > 0 chose combination with minimum possible number of modules 10 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
IP for FRAMA 11 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
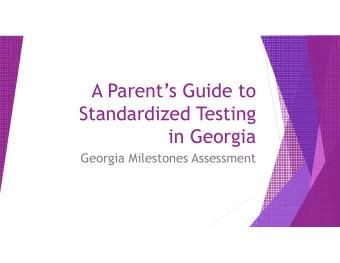
Decision variables A = set of airports x am : airport a assigned to module m M = set of modules z m : module m is used T = set of time slots y atf : flight f arrives/departs at/from airport a in time slot t V a = flights at airport a w ab : conflict between airport a and airport b (some t ) p atf = cost to move flight f at airport a to time slot t s af = scheduled time for flight f at airport a i 𝜀 maximum shift distance for scheduled aircraft in terms of time slots: 𝜀 = Δ / 5. 12 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision variables A = set of airports x am : airport a assigned to module m M = set of modules z m : module m is used T = set of time slots y atf : flight f arrives/departs at/from airport a in time slot t V a = flights at airport a w ab : conflict between airport a and airport b (some t ) p atf = cost to move flight f at airport a to time slot t s af = scheduled time for flight f at airport a i min # shifts: p atf =1 if t ≠ s af ; p atf =0 if t=s af 𝜀 maximum shift distance for scheduled aircraft in min total amount of shifts: p atf =|t-s af | terms of time slots: 𝜀 = Δ / 5. 12 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision variables A = set of airports x am : airport a assigned to module m M = set of modules z m : module m is used T = set of time slots y atf : flight f arrives/departs at/from airport a in time slot t V a = flights at airport a w ab : conflict between airport a and airport b (some t ) p atf = cost to move flight f at airport a to time slot t s af = scheduled time for flight f at airport a i min # shifts: p atf =1 if t ≠ s af ; p atf =0 if t=s af 𝜀 maximum shift distance for scheduled aircraft in min total amount of shifts: p atf =|t-s af | terms of time slots: 𝜀 = Δ / 5. X X X X min c 1 z m + c 2 p atf y atf (1) m ∈ M a ∈ A t ∈ T f ∈ V a s.t. x am 6 z m ∀ ( a, m ) ∈ A × M (2) X x am = 1 ∀ a ∈ A (3) m ∈ M X 6 1 ∀ ( a, t ) ∈ A × T (4) y atf f ∈ V a min( | T | ,s af + δ ) X = 1 ∀ ( a, f ) ∈ A × V a (5) y atf t =max(1 ,s af − δ ) X X y atf + y btf 6 1 + w ab ∀ ( a, b, t ) ∈ A × A × T, a < b (6) f ∈ V a f ∈ V b x am + x bm 6 2 − w ab ∀ ( a, b, m ) ∈ A × A × M, a < b (7) X x am 6 MAP ∀ m ∈ M (8) a ∈ A (9) x, y, w, z binary 12 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision variables A = set of airports x am : airport a assigned to module m M = set of modules z m : module m is used T = set of time slots y atf : flight f arrives/departs at/from airport a in time slot t V a = flights at airport a w ab : conflict between airport a and airport b (some t ) p atf = cost to move flight f at airport a to time slot t s af = scheduled time for flight f at airport a i min # shifts: p atf =1 if t ≠ s af ; p atf =0 if t=s af 𝜀 maximum shift distance for scheduled aircraft in min total amount of shifts: p atf =|t-s af | terms of time slots: 𝜀 = Δ / 5. c 1 *#modules + c 2 * sum of shifts X X X X min c 1 z m + c 2 p atf y atf (1) m ∈ M a ∈ A t ∈ T f ∈ V a s.t. x am 6 z m ∀ ( a, m ) ∈ A × M (2) X x am = 1 ∀ a ∈ A (3) m ∈ M X 6 1 ∀ ( a, t ) ∈ A × T (4) y atf f ∈ V a min( | T | ,s af + δ ) X = 1 ∀ ( a, f ) ∈ A × V a (5) y atf t =max(1 ,s af − δ ) X X y atf + y btf 6 1 + w ab ∀ ( a, b, t ) ∈ A × A × T, a < b (6) f ∈ V a f ∈ V b x am + x bm 6 2 − w ab ∀ ( a, b, m ) ∈ A × A × M, a < b (7) X x am 6 MAP ∀ m ∈ M (8) a ∈ A (9) x, y, w, z binary 12 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision variables A = set of airports x am : airport a assigned to module m M = set of modules z m : module m is used T = set of time slots y atf : flight f arrives/departs at/from airport a in time slot t V a = flights at airport a w ab : conflict between airport a and airport b (some t ) p atf = cost to move flight f at airport a to time slot t s af = scheduled time for flight f at airport a i min # shifts: p atf =1 if t ≠ s af ; p atf =0 if t=s af 𝜀 maximum shift distance for scheduled aircraft in min total amount of shifts: p atf =|t-s af | terms of time slots: 𝜀 = Δ / 5. c 1 *#modules + c 2 * sum of shifts X X X X min c 1 z m + c 2 p atf y atf (1) m ∈ M a ∈ A t ∈ T f ∈ V a Some airport assigned to module m s.t. x am 6 z m ∀ ( a, m ) ∈ A × M (2) X x am = 1 ∀ a ∈ A (3) m ∈ M X 6 1 ∀ ( a, t ) ∈ A × T (4) y atf f ∈ V a min( | T | ,s af + δ ) X = 1 ∀ ( a, f ) ∈ A × V a (5) y atf t =max(1 ,s af − δ ) X X y atf + y btf 6 1 + w ab ∀ ( a, b, t ) ∈ A × A × T, a < b (6) f ∈ V a f ∈ V b x am + x bm 6 2 − w ab ∀ ( a, b, m ) ∈ A × A × M, a < b (7) X x am 6 MAP ∀ m ∈ M (8) a ∈ A (9) x, y, w, z binary 12 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision variables A = set of airports x am : airport a assigned to module m M = set of modules z m : module m is used T = set of time slots y atf : flight f arrives/departs at/from airport a in time slot t V a = flights at airport a w ab : conflict between airport a and airport b (some t ) p atf = cost to move flight f at airport a to time slot t s af = scheduled time for flight f at airport a i min # shifts: p atf =1 if t ≠ s af ; p atf =0 if t=s af 𝜀 maximum shift distance for scheduled aircraft in min total amount of shifts: p atf =|t-s af | terms of time slots: 𝜀 = Δ / 5. c 1 *#modules + c 2 * sum of shifts X X X X min c 1 z m + c 2 p atf y atf (1) m ∈ M a ∈ A t ∈ T f ∈ V a Some airport assigned to module m → module m used s.t. x am 6 z m ∀ ( a, m ) ∈ A × M (2) X x am = 1 ∀ a ∈ A (3) m ∈ M X 6 1 ∀ ( a, t ) ∈ A × T (4) y atf f ∈ V a min( | T | ,s af + δ ) X = 1 ∀ ( a, f ) ∈ A × V a (5) y atf t =max(1 ,s af − δ ) X X y atf + y btf 6 1 + w ab ∀ ( a, b, t ) ∈ A × A × T, a < b (6) f ∈ V a f ∈ V b x am + x bm 6 2 − w ab ∀ ( a, b, m ) ∈ A × A × M, a < b (7) X x am 6 MAP ∀ m ∈ M (8) a ∈ A (9) x, y, w, z binary 12 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision variables A = set of airports x am : airport a assigned to module m M = set of modules z m : module m is used T = set of time slots y atf : flight f arrives/departs at/from airport a in time slot t V a = flights at airport a w ab : conflict between airport a and airport b (some t ) p atf = cost to move flight f at airport a to time slot t s af = scheduled time for flight f at airport a i min # shifts: p atf =1 if t ≠ s af ; p atf =0 if t=s af 𝜀 maximum shift distance for scheduled aircraft in min total amount of shifts: p atf =|t-s af | terms of time slots: 𝜀 = Δ / 5. c 1 *#modules + c 2 * sum of shifts X X X X min c 1 z m + c 2 p atf y atf (1) m ∈ M a ∈ A t ∈ T f ∈ V a Some airport assigned to module m → module m used s.t. x am 6 z m ∀ ( a, m ) ∈ A × M (2) X Each airport assigned to 1 module x am = 1 ∀ a ∈ A (3) m ∈ M X 6 1 ∀ ( a, t ) ∈ A × T (4) y atf f ∈ V a min( | T | ,s af + δ ) X = 1 ∀ ( a, f ) ∈ A × V a (5) y atf t =max(1 ,s af − δ ) X X y atf + y btf 6 1 + w ab ∀ ( a, b, t ) ∈ A × A × T, a < b (6) f ∈ V a f ∈ V b x am + x bm 6 2 − w ab ∀ ( a, b, m ) ∈ A × A × M, a < b (7) X x am 6 MAP ∀ m ∈ M (8) a ∈ A (9) x, y, w, z binary 12 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision variables A = set of airports x am : airport a assigned to module m M = set of modules z m : module m is used T = set of time slots y atf : flight f arrives/departs at/from airport a in time slot t V a = flights at airport a w ab : conflict between airport a and airport b (some t ) p atf = cost to move flight f at airport a to time slot t s af = scheduled time for flight f at airport a i min # shifts: p atf =1 if t ≠ s af ; p atf =0 if t=s af 𝜀 maximum shift distance for scheduled aircraft in min total amount of shifts: p atf =|t-s af | terms of time slots: 𝜀 = Δ / 5. c 1 *#modules + c 2 * sum of shifts X X X X min c 1 z m + c 2 p atf y atf (1) m ∈ M a ∈ A t ∈ T f ∈ V a Some airport assigned to module m → module m used s.t. x am 6 z m ∀ ( a, m ) ∈ A × M (2) X Each airport assigned to 1 module x am = 1 ∀ a ∈ A (3) m ∈ M At most 1 flight arrives/departs at airport X 6 1 ∀ ( a, t ) ∈ A × T (4) y atf time slot t f ∈ V a min( | T | ,s af + δ ) X = 1 ∀ ( a, f ) ∈ A × V a (5) y atf t =max(1 ,s af − δ ) X X y atf + y btf 6 1 + w ab ∀ ( a, b, t ) ∈ A × A × T, a < b (6) f ∈ V a f ∈ V b x am + x bm 6 2 − w ab ∀ ( a, b, m ) ∈ A × A × M, a < b (7) X x am 6 MAP ∀ m ∈ M (8) a ∈ A (9) x, y, w, z binary 12 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Decision variables A = set of airports x am : airport a assigned to module m M = set of modules z m : module m is used T = set of time slots y atf : flight f arrives/departs at/from airport a in time slot t V a = flights at airport a w ab : conflict between airport a and airport b (some t ) p atf = cost to move flight f at airport a to time slot t s af = scheduled time for flight f at airport a i min # shifts: p atf =1 if t ≠ s af ; p atf =0 if t=s af 𝜀 maximum shift distance for scheduled aircraft in min total amount of shifts: p atf =|t-s af | terms of time slots: 𝜀 = Δ / 5. c 1 *#modules + c 2 * sum of shifts X X X X min c 1 z m + c 2 p atf y atf (1) m ∈ M a ∈ A t ∈ T f ∈ V a Some airport assigned to module m → module m used s.t. x am 6 z m ∀ ( a, m ) ∈ A × M (2) X Each airport assigned to 1 module x am = 1 ∀ a ∈ A (3) m ∈ M At most 1 flight arrives/departs at airport X 6 1 ∀ ( a, t ) ∈ A × T (4) y atf time slot t f ∈ V a min( | T | ,s af + δ ) Each flight ± 𝜀 from scheduled time X = 1 ∀ ( a, f ) ∈ A × V a (5) y atf t =max(1 ,s af − δ ) X X y atf + y btf 6 1 + w ab ∀ ( a, b, t ) ∈ A × A × T, a < b (6) f ∈ V a f ∈ V b x am + x bm 6 2 − w ab ∀ ( a, b, m ) ∈ A × A × M, a < b (7) X x am 6 MAP ∀ m ∈ M (8) a ∈ A (9) x, y, w, z binary 12 30.11.2017 SID 2017 - Stakeholder Cooperation for Improved Predictability and Lower Cost Remote Services
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.