Stabilization of TS fuzzy systems with time-delay and nonlinear - PowerPoint PPT Presentation
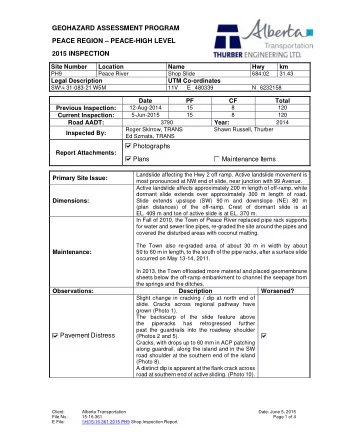
Stabilization of TS fuzzy systems with time-delay and nonlinear consequents Zolt an Nagy, Am alia M aty as, Zs ofia Lendek Technical University of Cluj-Napoca, Romania 11-17 July 2020, IFAC World Congress Online (Berlin, Germany)
Stabilization of TS fuzzy systems with time-delay and nonlinear consequents Zolt´ an Nagy, Am´ alia M´ aty´ as, Zs´ ofia Lendek Technical University of Cluj-Napoca, Romania 11-17 July 2020, IFAC World Congress Online (Berlin, Germany)
Background Fuzzy system with nonlinear consequents Controller design Example Summary 2nd year MSc student Technical University of Cluj-Napoca ROCON research group
Background Fuzzy system with nonlinear consequents Controller design Example Summary Outline Background 1 Fuzzy system with nonlinear consequents 2 Controller design 3 Example 4 Summary 5
Background Fuzzy system with nonlinear consequents Controller design Example Summary Outline Background 1 Fuzzy system with nonlinear consequents 2 Controller design 3 Example 4 Summary 5
Background Fuzzy system with nonlinear consequents Controller design Example Summary Problem statement Controller design method for Takagi-Sugeno (TS) systems with nonlinear consequents Time-delayed input The membership functions may depend on both current and delayed states Slope-bounded local nonlinearities LMI conditions for stabilization of the TS systems
Background Fuzzy system with nonlinear consequents Controller design Example Summary Fuzzy state-space model Model: s � � �� � x ( t ) = ˙ h i z ( t ) A i x ( t ) + B i u ( t ) i =1 x ( t ) ∈ R n x state vector u ( t ) ∈ R n u input vector s - number of rules z ( t ) - premise vector, available h i ( z ) - membership function convex sum: h i ( z ) ∈ [0 , 1], � s i =1 h i ( z ) = 1 A i and B i are local linear models
Background Fuzzy system with nonlinear consequents Controller design Example Summary Fuzzy delayed state-space model Model: s s � � � � � �� � x ( t ) = ˙ z ( t ) z ( t − τ ( t )) A ij x ( t ) + D ij x ( t − τ ( t )) + B ij u ( t − τ ( t )) h i h j i =1 j =1 τ ( t ) - time dependent delay h i ( z ( t − τ ( t ))) - membership function that depends on the delayed states Notation τ ( t ) := τ s s � � � � � � F zz τ := h i z ( t ) h j z ( t − τ ( t )) F ij i =1 j =1 Model x ( t ) = A zz τ x ( t ) + D zz τ x ( t − τ ) + B zz τ u ( t − τ ) ˙
Background Fuzzy system with nonlinear consequents Controller design Example Summary Fuzzy state-space models Disadvantage The number of fuzzy rules increases exponentially with the number of nonlinearities.
Background Fuzzy system with nonlinear consequents Controller design Example Summary Fuzzy state-space models Disadvantage The number of fuzzy rules increases exponentially with the number of nonlinearities. Idea Keep some of the nonlinearities in their original form.
Background Fuzzy system with nonlinear consequents Controller design Example Summary Outline Background 1 Fuzzy system with nonlinear consequents 2 Controller design 3 Example 4 Summary 5
Background Fuzzy system with nonlinear consequents Controller design Example Summary Fuzzy system with time-delayed input and nonlinear consequents Model: x ( t ) = A zz τ x ( t ) + D zz τ x ( t − τ ) + B zz τ G ψ ( Hx ( t )) + B zz τ u ( t − τ ) ˙ x ( t − τ ) is the time-delayed state vector u ( t − τ ) is the time-delayed input vector ψ 1 ( · ) ψ 2 ( · ) ψ ( Hx ( t )) is a vector function, ψ ( · ) = ... ψ r ( · ) each entry is a function of a linear combination of x ( t ) G system matrix Advantages Fewer fuzzy rules Measured-state & unmeasured-state nonlinearities separated
Background Fuzzy system with nonlinear consequents Controller design Example Summary Slope-bound condition For each ψ i , i = 1 , ..., r there exist b i such that 0 ≤ ψ i ( v ) − ψ i ( w ) ≤ b i v − w There exist a δ i ( t ) ∈ [0 , b i ], so that ψ i ( v ) − ψ i ( w ) = δ i ( t )( v − w ) , ∀ v , w ∈ R , v � = w
Background Fuzzy system with nonlinear consequents Controller design Example Summary Example x 1 ( t ) = − 2 x 1 ( t ) + 2 x 1 ( t − τ ) + x 2 ( t − τ ) ˙ x 2 ( t ) = ( ˙ − 6+ sin ( x 1 ( t ))) x 2 ( t )+ ( 0 . 9+0 . 1sin( x 1 ( t ))) x 1 ( t − τ ) + ( 4+sin( x 1 ( t − τ ))) x 2 ( t − τ )+(0 . 75+0 . 25sin( x 1 ( t )))( u ( t − τ )+ α 1 ( x 1 )+ α 2 ( x 2 ) ) � �� � α 1 ( v )= α 2 ( v )= cos ( v )+ v Rearranging the system: � − 2 � � � 0 2 1 x ( t )= ˙ x ( t ) + x ( t − τ ) 0 − 6+sin( x 1 ( t )) 0 . 9+0 . 1sin( x 1 ( t )) 4+sin( x 1 ( t − τ )) � �� � � �� � � s � s � s � s j =1 h i ( z ) h j ( z − τ ) A ij j =1 h i ( z ) h j ( z − τ ) D ij i =1 i =1 � � � � 0 + u ( t − τ ) + α 1 ( x 1 ) + α 2 ( x 2 ) 0 . 75+0 . 25sin( x 1 ( t )) � �� � � �� � ψ ( · ) � s � s j =1 h i ( z ) h j ( z − τ ) B ij i =1
Background Fuzzy system with nonlinear consequents Controller design Example Summary Outline Background 1 Fuzzy system with nonlinear consequents 2 Controller design 3 Example 4 Summary 5
Background Fuzzy system with nonlinear consequents Controller design Example Summary Controller design Model x ( t ) = A zz τ x ( t ) + D zz τ x ( t − τ ) + B zz τ G ψ ( Hx ( t )) + B zz τ u ( t − τ ) ˙ Proposed controller structure u ( t ) = − K z x ( t ) − G ψ ( Hx ( t )) Delayed in time u ( t − τ ) = − K z τ x ( t − τ ) − G ψ ( Hx ( t − τ ))
Background Fuzzy system with nonlinear consequents Controller design Example Summary Controller design cont x ( t ) = A zz τ x ( t ) + ( D zz τ − B zz τ K z τ ) x ( t − τ ) + B zz τ G ( ψ ( Hx ( t )) − ψ ( Hx ( t − τ ))) ˙ Closed-loop system ψ ( Hx ( t )) − ψ ( Hx ( t − τ )) = δ ( t )( Hx ( t ) − Hx ( t − τ )) = δ ( t ) H ( x ( t ) − x ( t − τ )) , Notation η := H ( x ( t ) − x ( t − τ )) Closed-loop system x ( t ) = A zz τ x ( t ) + ( D zz τ − B zz τ K z τ ) x ( t − τ ) + B zz τ G δ ( t ) η ˙
Background Fuzzy system with nonlinear consequents Controller design Example Summary Stabilization Lyapunov functional � t V ( t , x ) = x T ( t ) Px ( t ) + x T ( s ) Qx ( s ) ds t − τ P = P T > 0, Q = Q T > 0 delay-independent conditions
Background Fuzzy system with nonlinear consequents Controller design Example Summary Main result System: x ( t ) = A zz τ x ( t ) + D zz τ x ( t − τ ) + B zz τ G ψ ( Hx ( t )) + B zz τ u ( t − τ ) ˙ Controller: u ( t ) = − K z τ x ( t ) − G ψ ( Hx ( t )) Closed-loop system: x ( t ) = A zz τ x ( t ) + ( D zz τ − B zz τ K z τ ) x ( t − τ ) + B zz τ G δ ( t ) η ˙
Background Fuzzy system with nonlinear consequents Controller design Example Summary Main result Theorem (1) Assume that τ is differentiable, ˙ τ ≤ d and d ∈ [0 , 1) is a given constant. If there exist P = P T > 0 , Q = Q T > 0 , M = diag ( m 1 , ..., m r ) > 0 , N i , for i = 1 , ..., s and constant ǫ > 0 so that F ijj ≤ 0 and 2 s − 1 F ijj + F ijk + F ikj ≤ 0 ∀ i , j , k = 1 , ..., s , j � = k . where PA T B ij GM + PH T ij + ∗ + Q D ij P − B ij N k P − PH T − (1 − d ) Q 0 ∗ F ijk = , ∗ ∗ ν ( M ) 0 ∗ ∗ ∗ − ǫ I and ν ( M ) = − 2 M diag ( 1 b 1 , ..., 1 b 1 ) then the closed-loop system is asymptotically stable. Controller gains are recovered: N i = K i P − 1 .
Background Fuzzy system with nonlinear consequents Controller design Example Summary Outline Background 1 Fuzzy system with nonlinear consequents 2 Controller design 3 Example 4 Summary 5
Background Fuzzy system with nonlinear consequents Controller design Example Summary Numerical example x 1 ( t ) = − 2 x 1 ( t ) + 2 x 1 ( t − τ ) + x 2 ( t − τ ) ˙ x 2 ( t ) = ( ˙ − 6+ sin ( x 1 ( t ))) x 2 ( t )+ ( 0 . 9+0 . 1sin( x 1 ( t ))) x 1 ( t − τ ) + ( 4+sin( x 1 ( t − τ ))) x 2 ( t − τ )+(0 . 75+0 . 25sin( x 1 ( t )))( u ( t − τ )+ α 1 ( x 1 )+ α 2 ( x 2 ) ) � �� � α 1 ( v )= α 2 ( v )= cos ( v )+ v Rearranging the system: � − 2 � � � 0 2 1 x ( t )= ˙ x ( t ) + x ( t − τ ) 0 − 6+sin( x 1 ( t )) 0 . 9+0 . 1sin( x 1 ( t )) 4+sin( x 1 ( t − τ )) � �� � � �� � � s � s � s � s j =1 h i ( z ) h j ( z − τ ) A ij j =1 h i ( z ) h j ( z − τ ) D ij i =1 i =1 � � � � 0 + u ( t − τ ) + α 1 ( x 1 ) + α 2 ( x 2 ) 0 . 75+0 . 25sin( x 1 ( t )) � �� � � �� � ψ ( · ) � s � s j =1 h i ( z ) h j ( z − τ ) B ij i =1
Background Fuzzy system with nonlinear consequents Controller design Example Summary Numerical example Model: x ( t ) = A zz τ x ( t ) + D zz τ x ( t − τ ) + B zz τ G ψ ( Hx ( t )) + B zz τ u ( t − τ ) ˙ Matrices � − 2 � � − 2 � 0 0 A 11 = A 12 = , A 21 = A 22 = , 0 − 5 0 − 7 � 2 � 2 � � � 2 � � 2 � 1 1 1 1 D 11 = , D 12 = , D 21 = , D 22 = , 0 . 8 3 0 . 8 5 1 3 1 5 � 0 � 1 � � � 0 � 0 � � G = 1 1 , H = , B 11 = B 12 = , B 21 = B 22 = , 0 1 0 . 5 1 h 1 ( z ) = 1 − sin ( z ) , h 2 ( z ) = 1 − h 1 ( z ) , z = x 1 . 2
Background Fuzzy system with nonlinear consequents Controller design Example Summary Numerical example Slowly varying time-delay function: τ ≤ d = 0 . 01 ˙ τ ( t ) = 1 + 0 . 5 cos (0 . 01 t ) Controller gains: � � K 1 = 5 . 62 6 . 99 � � K 2 = 2 . 38 5 . 06
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.