11 Fuzzy Rule-Based Models Fuzzy Systems Engineering Toward - PowerPoint PPT Presentation
11 Fuzzy Rule-Based Models Fuzzy Systems Engineering Toward Human-Centric Computing Contents 11.1 Fuzzy rules as a vehicle of knowledge representation 11.2 General categories of fuzzy rules and their semantics 11.3 Syntax of fuzzy rules 11.4
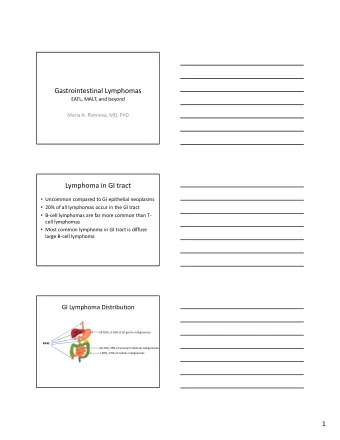
Examples of fuzzy implications Name Definition Comment f � ( A ( x ), B ( y )) = min [1, 1 − A ( x ) + B ( y )] Lukasiewicz − + λ + 1 ( ) ( 1 ) ( ) A x B y = λ > -1 ( ( ) ( )) min 1 f A x , B y , Pseudo-Lukasiewicz λ + λ 1 ( ) A x 1 w = − w + w / ( ( ) ( )) min [ 1 ( 1 ( ) ( ) ) ] f A x , B y , A x B y Pseudo-Lukasiewicz w > 0 w ≤ 1 if ( ) ( ) A x B y = ( ( ) ( )) f a A x , B y Gaines 0 otherwise ≤ 1 if ( ) ( ) A x B y = ( ( ) ( )) f g A x , B y Gödel ( ) otherwise B y ≤ 1 if ( ) ( ) A x B y = Goguen ( ) ( ( ) ( )) B y f e A x , B y otherwise ( ) A x Kleene = − f b ( A ( x ) , B ( y )) max [ 1 A ( x ) , B ( y )] = − + Reichenbach ( ( ) ( )) 1 ( ) ( ) ( )] f r A x , B y A x A x B y = − f z ( A ( x ) , B ( y )) max [ 1 A ( x ) , min ( A ( x ) , B ( y ))] Zadeh = − + 2 Klir-Yuan f k ( A ( x ) , B ( y )) 1 A ( x ) A ( x ) B ( y ) Pedrycz and Gomide, FSE 2007
Example: f � = Lukasiewicz R � ( x,y ) = min{1, 1– A ( x )+ B ( y )} R � ( x,y ) = min{1, 1– A ( x )+ B ( y )} A ( x ) = A ( x ,4,5,6) ∀ ( A ( x ), B ( y )) ∈ [0,1] 2 B ( y ) = B ( y ,4,5,6) Pedrycz and Gomide, FSE 2007
Example: f k = Klir–Yuan R k ( x,y ) = 1– A ( x )+ A ( x ) 2 B ( y ) R k ( x,y ) = 1– A ( x )+ A ( x ) 2 B ( y ) A ( x ) = A ( x ,4,5,6) ∀ ( A ( x ), B ( y )) ∈ [0,1] 2 B ( y ) = B ( y ,4,5,6) Pedrycz and Gomide, FSE 2007
� Categories of fuzzy implications: 1. s-implications X Y = ∀ ∈ × ( ( ), ( )) ( ) ( ) ( ) f A x B y A x sB y x , y is = − ( ( ), ( )) max[ 1 ( ) ( )] Kleene f A x B y A x , B y b = − + ( ( ), ( )) min{ 1 1 ( ) ( )} Lukasiewic z f A x B y , A x B y g 2. r-implications X Y = ∈ ≤ ∀ ∈ × ( ( ), ( )) sup[ [ 0 1 ] | ( ) ( )] ( ) f A x B y c , A x t c B y x , y ir = min t ≤ 1 if ( ) ( ) A x B y = ( ( ), ( )) Gödel f A x B y g > ( ) ( ) ( ) B y A x B y Pedrycz and Gomide, FSE 2007
Semantics of gradual rules B ( y ) ≥ A ( x ) ∀ x ∈ X and ∀ y ∈ Y the more X is A , the more Y is B ⇒ B ( y ) 1.0 1.0 A ( x ) B Rd x y B Rd = { y ∈ Y | B ( y ) ≥ A ( x )} for each x ∈ X Pedrycz and Gomide, FSE 2007
Example: R d = f a = Gaines ≥ 1 if ( ) ( ) B y A x = ( , ) R d x y 0 otherwise (a) Gradual rule Rd = fa 1 0.8 0.6 0.4 0.2 0 1 B(y) 1 A(x) 0.8 0.5 0.6 0.4 0.2 0 0 R d ( x,y ) R d ( x,y ) ∀ ( A ( x ), B ( y )) ∈ [0,1] 2 A ( x ) = A ( x ,3,5,7) B ( y ) = B ( y ,3,5,7) Pedrycz and Gomide, FSE 2007
Main types of rule bases � Fuzzy rule base ≡ { R 1 , R 2 ,...., R N } ≡ finite family of fuzzy rules � Fuzzy rule base can assume various formats: 1. fuzzy graph R i : If X is A i then Y is B i is a fuzzy granule in X × Y , i = 1,..., N 2. fuzzy implication rule base R i : If X is A i then Y is B i is fuzzy implication , i = 1,..., N 3. functional fuzzy rule base R i : If X is A i then y = f i ( x ) is a functional fuzzy rule , i = 1,..., N Pedrycz and Gomide, FSE 2007
Fuzzy graph � Fuzzy rule base R ≡ collection of rules R 1 , R 2 ,...., R N � Each fuzzy rule R i is a fuzzy granule (point) � Fuzzy graph ≡ R is a collection of fuzzy granules – granular approximation of a function N N = = × ( ) R � R � A B i i i = = i 1 i 1 – R = R 1 or R 2 or .... or R N – general form N = ( , ) [ ( ) ( )] R x y S A x tB y i i i = 1 Pedrycz and Gomide, FSE 2007
Point (a) (b) 10 10 8 8 6 6 y P 4 4 B Point P in X × Y 2 2 0 0 P = A × B 1 0 0 2 4 6 8 x 10 B(y) A is a singleton in X (c) B is a singleton in Y 1 A A(x) 0 0 2 4 6 8 10 x Pedrycz and Gomide, FSE 2007
Granule (a) (b) 10 10 8 8 B G 6 6 y 4 4 2 2 Granule G in X × Y 0 0 G = A × B 1 0 0 2 4 6 8 10 x B(y) (c) A is an interval in X B is an interval in Y 1 A A(x) 0 0 2 4 6 8 10 x Pedrycz and Gomide, FSE 2007
Fuzzy granules ≡ fuzzy points (a) (b) Fuzzy granule R 10 10 8 8 R B 6 6 y 4 4 2 2 fuzzy granule R in X × Y 0 0 R = A × B 1 0 0 5 10 x B(y) (c) A is a fuzzy set on X B is a fuzzy set on Y 1 A A(x) 0 0 2 4 6 8 10 x Pedrycz and Gomide, FSE 2007
Fuzzy rule base as a set fuzzy granules (b) Fuzzy granules Ri (a) 10 10 y 9 y R1 8 8 B1 R2 7 B2 R3 6 6 B3 R4 5 B4 R5 4 4 B5 3 2 2 1 0 1 0 0 B(y) 0 1 2 3 4 5 6 7 8 9 10 x (c) 1 A1 A2 A3 A4 A5 R i = A i × B i 0 0 2 4 6 8 x 10 Pedrycz and Gomide, FSE 2007
Graph of a function f and its granular approximation R (a) function y = f(x) (b)Granular approximation of y = f(x) 12 12 y y 11 10 10 R i = A i × B i R1 9 8 8 R2 7 R3 6 6 R4 5 f 4 4 R5 R6 R7 3 R R8 2 2 1 0 1 2 3 4 5 6 7 8 9 10 11 12 0 2 4 6 8 10 12 x x f R Pedrycz and Gomide, FSE 2007
Fuzzy rule base and fuzzy graph Example 1 (b)Fuzzy rule base as a fuzzy graph (t = min) 10 y 9 8 7 R = Union Ri 6 5 4 3 2 1 0 0 1 2 3 4 5 6 7 8 9 10 x R i = A i × B i ⇒ R i ( x , y ) = min [ A i ( x ), B i ( y )] R = ∪ R i ⇒ R ( x , y ) = max [ R i ( x , y ), i = 1,..., N ] Pedrycz and Gomide, FSE 2007
Fuzzy rule base and fuzzy graph Example 2 (d) Fuzzy rule base as a fuzzy graph (t = product) 10 y 9 8 7 R = Union Ri 6 5 4 3 2 1 0 0 1 2 3 4 5 6 7 8 9 10 x R i = A i t B i ⇒ R i ( x , y ) = A i ( x ) B i ( y ) R = ∪ R i ⇒ R ( x , y ) = max [ R i ( x , y ), i = 1,..., N ] Pedrycz and Gomide, FSE 2007
Fuzzy implication • Fuzzy rule base R ≡ collection of rules R 1 , R 2 ,...., R N • Each fuzzy rule R i is a fuzzy implication • Fuzzy rule base R is a collection of fuzzy relations • relation R is obtained using intersection N N N = = = ⇒ ( ) R � R � f � A B i i i i = = = i 1 i 1 i 1 • R = R 1 and R 2 and .... and R N • general form N = ( ( ) ( )) R T f A x , B y i i i i = 1 Pedrycz and Gomide, FSE 2007
Fuzzy rule as an implication (a) (b) Lukasiewicz implication R 10 10 8 8 B 6 6 R y 4 4 2 2 fuzzy rule R in X × Y 0 0 1 0 0 2 4 6 8 10 B(y) x R = f � ( A , B ) (c) Lukasiewicz implication 1 A A(x) 0 0 2 4 6 8 10 x Pedrycz and Gomide, FSE 2007
Fuzzy rule base and fuzzy implication Example 1a (b) Fuzzy rule base as Lukasiewicz implication (t = min) 10 9 8 7 6 5 y 4 3 2 1 0 0 1 2 3 4 5 6 7 8 9 10 x R i = f � ( A , B ) ⇒ R i ( x , y ) = min [1, 1 – A i ( x ) + B i ( y )] Lukasiewicz implication R = ∩ R i ⇒ R ( x , y ) = min [ R i ( x , y ), i = 1,..., 5] min t-norm Pedrycz and Gomide, FSE 2007
Fuzzy rule base and fuzzy implication Example 1b (b) Fuzzy rule base as Lukasiewicz implication (t = min) 10 9 8 7 6 5 y 4 3 2 1 0 0 1 2 3 4 5 6 7 8 9 10 x R i = f � ( A , B ) ⇒ R i ( x , y ) = min [1, 1 – A i ( x ) + B i ( y )] Lukasiewicz implication R = ∩ R i ⇒ R ( x , y ) = R 1 ( x , y ) t l R 2 ( x , y ) t l .... t l R i ( x , y ) Lukasiewicz t-norm Pedrycz and Gomide, FSE 2007
Fuzzy rule base and fuzzy implication Example 2a (b) Fuzzy rule base as Zadeh implication (t = min) 10 y 9 8 7 6 5 4 3 2 1 0 0 1 2 3 4 5 6 7 8 9 10 x R i = f z ( A , B ) ⇒ R i ( x , y ) = max [1 – A i ( x ), min( A i ( x ), B i ( y )] Zadeh implication R = ∩ R i ⇒ R ( x , y ) = min [ R i ( x , y ), i = 1,..., 5] min t-norm Pedrycz and Gomide, FSE 2007
Fuzzy rule base and fuzzy implication Example 2b (d) Fuzzy rule base as Zadeh implication (t = Lukasiewicz) 10 y 9 8 7 6 5 4 3 2 1 0 0 1 2 3 4 5 6 7 8 9 x 10 R i = f z ( A , B ) ⇒ R i ( x , y ) = max [1 – A i ( x ), min( A i ( x ), B i ( y )] Zadeh implication R = ∩ R i ⇒ R ( x , y ) = R 1 ( x , y ) t l R 2 ( x , y ) t l .... t l R i ( x , y ) Lukasiewicz t-norm Pedrycz and Gomide, FSE 2007
Data base � Data base contains definitions of: – universes – scaling functions of input and output variables – granulation of the universes membership functions � Granulation – granular constructs in the form of fuzzy points – granules along different regions of the universes � Construction of membership functions – expert knowledge – learning from data Pedrycz and Gomide, FSE 2007
Granulation X X granular constructs in granules along different the form of fuzzy points regions of the universes Pedrycz and Gomide, FSE 2007
Fuzzy inference � Basic idea of inference (a) 12 x = a y ac y = f ( x ) 10 y = b 8 6 I b b = Proj Y ( a c ∩ f ) 4 f ⇓ 2 b = Proj Y ( I ) 0 a 0 2 4 6 8 10 12 x Pedrycz and Gomide, FSE 2007
� Inference involves operations with sets (b) 12 x = A y y = f ( x ) 10 Ac B = f ( A ) ={ f ( x ), x ∈ A } 8 6 d I B = Proj Y ( A c ∩ f ) B 4 c f ⇓ 2 A B = Proj Y ( I ) 0 a 0 2 4 6 8 10 x 12 b Pedrycz and Gomide, FSE 2007
� Inference involving sets and relations (a) 12 x is A y ( x , y ) is R 10 Ac y is B 8 6 B I B = Proj Y ( A c ∩ R ) 4 R f ⇓ 2 A B = Proj Y ( I ) 0 0 2 4 6 8 10 12 x Pedrycz and Gomide, FSE 2007
Fuzzy inference ands operations with fuzzy sets and relations (b) 12 y Ac 10 8 ( fuzzy set on X ) X is A ( X , Y ) is R ( fuzzy relation on X × Y ) R 6 B I Y is B ( fuzzy set on Y ) 4 f 2 A 2 4 6 8 10 x 12 B = Proj Y ( A c ∩ R ) ⇓ = ⇒ ( ) sup { ( ) ( )} B y A x tR x , y B = Proj Y ( I ) x X ∈ Pedrycz and Gomide, FSE 2007
Fuzzy inference � Compositional rule of inference X is A ( X , Y ) is R Y is B = � B A R X is A ( X , Y ) is R Y is A o R Pedrycz and Gomide, FSE 2007
Fuzzy inference procedure procedure FUZZY-INFERENCE ( A , R ) returns a fuzzy set input : fuzzy relation: R fuzzy set: A local : x , y : elements of X and Y t : t-norm for all x and y do A c ( x , y ) ← A ( x ) for all x and y do I ( x , y ) ← A c ( x , y ) t R ( x , y ) B ( y ) ← sup x I ( x , y ) return B Pedrycz and Gomide, FSE 2007
Example: compositional rule of inference Pedrycz and Gomide, FSE 2007
Example: fuzzy inference with fuzzy graph Pedrycz and Gomide, FSE 2007
11.5 Types of rule-based systems and architectures Pedrycz and Gomide, FSE 2007
Linguistic fuzzy models X is A and Y is B P : input If X is A 1 and Y is B 1 then Z is C 1 R 1 : ...................... If X is A i and Y is B i then Z is C i R i : rule base ....................... If X is A N and Y is B N then Z is C N R N : Z : Z is C output � all fuzzy sets A , B , A i ,s and B i ,s are given � rule and connectives ( and , or ) with known semantics � membership function of fuzzy set C = ?? Pedrycz and Gomide, FSE 2007
min-max models Assume P : X is A and Y is B P ( x , y ) = min{ A ( x ), B ( y )} R i : If X is A i and Y is B i then Z is C i R i ( x , y , z ) = min{ A i ( x ), B i ( y ), C i ( z )} i = 1,..., N Using the compositional rule of inference (t = min) N = = � � C P R P � R i = 1 i = = ( ) sup {min[ ( ), max( ( ), 1 )]} C z P x , y R x , y , z i ,...,N i x , y Pedrycz and Gomide, FSE 2007
N N N ′ = = = = � � � � � ( � ) C P R P R P R C i i i = = = 1 1 1 i i i ′ = � C P R i i ′ = = ∧ ∧ ∧ ∧ ( ) sup {min[ ( ), ( )]} sup { ( ) ( ) ( ) ( ) ( )]} C z P x , y R x , y , z A x B y A x B y C z i i i i i x , y x , y ∧ = = sup [ ( ) ( )] Poss( ) A x A x A , A m i i i x ∧ = = sup [ ( ) ( )] Poss( ) B y B y B , B n i i i y ′ = ∧ ∧ ( ) ( ) C z m n C z i i i i = ∧ = = ∧ = λ � � ( ) max{( ) 1 } max{ ( ), 1 } C z m n C , i , , N C z i , , N i i i i i − λ is the degree of activation of i th rule i Pedrycz and Gomide, FSE 2007
min-max fuzzy model processing procedure MIN-MAX-MODEL ( A , B ) returns a fuzzy set local : fuzzy sets: A i , B i , C i , i =1,.., N activation degrees: λ i Initialization C = ∅ for i = 1: N do m i = max (min ( A , A i )) n i = max (min ( B , B i )) λ i = min ( m i , n i ) if λ i ≠ 0 then C i ’ = min ( λ i , C i ) and C = max( C , C i ’ ) return C Pedrycz and Gomide, FSE 2007
Example: min-max fuzzy model processing A i A j A B i B B j C i C j 1 1 1 m j ’ C j n j n j n i ’ C i m i m i x y z Pedrycz and Gomide, FSE 2007
min-max fuzzy model architecture A 1 , B 1 C 1 λ 1 ’ Poss Min C 1 A i , B i C i C λ i Poss ( A , B ) Min Max ’ C i A N , B N C N λ N ’ Poss Min C N Pedrycz and Gomide, FSE 2007
� Special case: numeric inputs = = 1 if 1 if x x y y o o = = ( ) ( ) A x and B y 0 otherwise 0 otherwise � Numeric output ∫ ( ) zC z dz Z = centroid defuzzific ation z ∫ ( ) C z dz Z N ∑ ∧ ( ) m n v i i i = 1 = i weighted average modal values z v i N ∑ ∧ ( ) m n i i = 1 i Pedrycz and Gomide, FSE 2007
Example ( x o , y o ), ∀ x o , y o ∈ [-2, 2] X is x o and Y is y o P : inputs If X is A 1 and Y is B 1 then Z is C 1 R 1 : rules If X is A 2 and Y is B 2 then Z is C 2 R 2 : N = 2, centroid defuzzification (a) Input and output fuzzy sets (b) Input-output mapping A1 A2 1 Ai(x) 0.5 0.5 0 z -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 x 0 B2 B2 1 -0.5 Bi(y) 0.5 0 -2 y -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 y -1 C1 C2 1 0 Ci(z) 0.5 -2 x 1 -1 0 0 1 2 -2 -1.5 -1 -0.5 0 0.5 1 1.5 z 2 2 Pedrycz and Gomide, FSE 2007
min-sum models � Assume P : X is A and Y is B P ( x , y ) = min{ A ( x ), B ( y )} R i : If X is A i and Y is B i then Z is C i R i ( x , y , z ) = min{ A i ( x ), B i ( y ), C i ( z )} i = 1,..., N � Using the compositional rule of inference (t = min) ′ = ∧ ∧ ∧ ∧ ( ) sup [ ( ) ( ) ( ) ( ) ( )] C z A x B y A x B y C z i i i i x , y Additive fuzzy models N (Kosko, 1992) ∑ ′ = ( ) C z w C i i = i 1 Pedrycz and Gomide, FSE 2007
Example: min-sum fuzzy model processing A i A j A B i B B j C i C j 1 1 1 ∑ C i m j ’ n j n j n i ’ ’ C j C i m i m i x y z Pedrycz and Gomide, FSE 2007
min-sum fuzzy model architecture A 1 , B 1 C 1 λ 1 Poss Min C 1 ’ A i , B i w 1 C i C w i λ i Poss ∑ ( A , B ) Min C i ’ A N , B N C N w N λ N Poss Min C N ’ Pedrycz and Gomide, FSE 2007
Example ( x o , y o ), ∀ x o , y o ∈ [-2, 2] X is x o and Y is y o P : inputs If X is A 1 and Y is B 1 then Z is C 1 R 1 : rules If X is A 2 and Y is B 2 then Z is C 2 R 2 : N = 2 w 1 = w 2 = 1, centroid defuzzification (a) Input and output fuzzy sets (b) Input-output mapping A1 A2 1 Ai(x) 0.5 0.5 0 z -2 -1.5 -1 -0.5 0 0.5 1 1.5 x 2 0 B2 B2 1 -0.5 Bi(y) 0.5 0 -2 -2 -1.5 -1 -0.5 0 0.5 1 1.5 y 2 y -1 C1 C2 1 0 Ci(z) 0.5 -2 x 1 -1 0 0 1 2 z -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2 Pedrycz and Gomide, FSE 2007
product-sum models 1- Product–probabilistic sum (b) Input-output mapping of product-probabilistic sum model ′ = ( ) ( ) C z m n C z 0.5 i i i i z 0 -0.5 N ′ = ( ) ( ) C z S C z -2 p i y = -1 1 i 0 -2 x 1 -1 0 1 2 2 2- Product–sum (d) Input-output mapping of product-sum model 0.5 ′ = ( ) ( ) C z m n C z z i i i i 0 -0.5 N -2 ∑ = ′ y ( ) ( ) C z C z i -1 = 1 i 0 -2 x 1 -1 0 1 2 2 Pedrycz and Gomide, FSE 2007
3 - Bounded product-bounded sum ′ = ⊗ ⊗ (c) Input-output mapping of bounded product-bounded sum model ( ) ( ) C z m n C z i i i i 1 N z ′ = ⊕ 0.5 ( ) ( ) C z C z i = 1 i 0 -0.5 ⊗ = + − max{ 0 1 } a b , a b -1 -2 y ⊕ = + -1 min{ 1 } a b , a b 0 -2 1 x -1 ∈ [ 0 1 ] a,b , 0 1 2 2 Pedrycz and Gomide, FSE 2007
Functional fuzzy models X is x and Y is y P : input If X is A 1 and Y is B 1 then z = f 1 ( x , y ) R 1 : ...................... If X is A i and Y is B i then z = f i ( x , y ) R i : rule base ....................... If X is A N and Y is B N then z = f N ( x , y ) R N : λ i ( x , y ) = A i ( x ) t B i ( y ) t = t-norm degree of activation N λ ∑ = = i ( ) ( ) z w x , y f x , y , w i i i output N = 1 ∑ i λ ( ) x , y i = 1 i Pedrycz and Gomide, FSE 2007
Functional fuzzy model architecture f 1 ( x , y ) A 1 , B 1 w 1 × ⊗ f 2 ( x , y ) A i , B i z w i ⊗ × ∑ ( x , y ) f N ( x , y ) A N , B N w N ⊗ × Pedrycz and Gomide, FSE 2007
Example 1 x ∈ [0, 3] P : X is x inputs If X is A 1 then z = x R 1 : rules If X is A 2 then z = – x + 3 R 2 : (a) Antecedent fuzzy sets (b) Consequent functions 1.2 3 Ai A1 A2 y 1 2.5 0.8 2 f2 f1 0.6 1.5 0.4 1 0.5 0.2 0 0 x 0 0.5 1 1.5 2 2.5 x 3 0 0.5 1 1.5 2 2.5 3 Pedrycz and Gomide, FSE 2007
∈ if ( 0 1 ] x x , = + − + ∈ ( ) ( )( 3 ) if [ 1 2 ] z A x x A x x x , 1 2 − + ∈ 3 if [ 2 3 ) x x , (b) Output of the functional model 2 y 1.8 1.6 1.4 1.2 output 1 0.8 0.6 0.4 0.2 0 0 0.5 1 1.5 2 2.5 x 3 Pedrycz and Gomide, FSE 2007
Example 2 x ∈ [0, 3] P : X is x inputs If X is A 1 then y = – sin(2 x ) R 1 : If X is A 2 then y = – 0 . 5 x rules R 2 : If X is A 3 then y = sin( 3x ) R 3 : output (a) Antecedent fuzzy sets (b) output of the functional fuzzy model 1.2 1.5 y y A2 A3 A1 1 1 0.8 0.5 0.6 0 0.4 -0.5 0.2 -1 0 -1.5 -5 -4 -3 -2 -1 0 1 2 3 4 x 5 -5 -4 -3 -2 -1 0 1 2 3 4 5 x Pedrycz and Gomide, FSE 2007
Example 2 x ∈ [0, 3] P : X is x inputs If X is A 1 then y = – 1 R 1 : If X is A 2 then y = x R 2 : rules If X is A 3 then y = 1 R 3 : output (a) Antecedent fuzzy sets (c) output of the functional fuzzy model 1.2 1.5 y y A2 A3 A1 1 1 0.8 0.5 0.6 0 0.4 -0.5 0.2 -1 0 -1.5 -5 -4 -3 -2 -1 0 1 2 3 4 x 5 -5 -4 -3 -2 -1 0 1 2 3 4 5 x Pedrycz and Gomide, FSE 2007
Gradual fuzzy models R i : The more X is A i the more Z is C i i = 1,..., N ≥ 1 if ( ) ( ) C z A x i i = ( , ) R x y i 0 otherwise N N ′ = = � � ( ) C C C α α i i i = = 1 1 i i Pedrycz and Gomide, FSE 2007
Gradual fuzzy model architecture A 1 C 1 α 1 ’ Poss C 1 C α 1 A i C i C α i Poss C α 1 Min x ’ C i A N C N α N ’ Poss C N C α 1 Pedrycz and Gomide, FSE 2007
Example: gradual fuzzy model processing A 1 A 2 C 1 C 2 1 1 α 1 α 1 ’ ’ C 1 C 2 α 2 α 2 x z Pedrycz and Gomide, FSE 2007
Example inputs x ∈ [0, 3] P : X is x R 1 : The more X is A 1 the more Z is C 1 rules R 2 : The more X is A 1 the more Z is C 1 output 4 A1 A2 1 z 0.8 3.5 0.6 Ai 0.4 3 0.2 0 1 1.5 2 2.5 3 3.5 x 4 2.5 C1 C2 1 2 0.8 0.6 Ci 1.5 0.4 0.2 0 1 z 1 1.5 2 2.5 3 3.5 4 1 1.5 2 2.5 3 3.5 4 x Pedrycz and Gomide, FSE 2007
11.6 Approximation properties of fuzzy rule-based models Pedrycz and Gomide, FSE 2007
� FRBS uniformly approximates continuous functions – any degree of accuracy – closed and bounded sets � Universal approximation with (Wang & Mendel, 1992): – algebraic product t-norm in antecedent – rule semantics via algebraic product – rule aggregation via ordinary sum – Gaussian membership functions – sup-min compositional rule of inference – pointwise inputs – centroid defuzzification Pedrycz and Gomide, FSE 2007
� Universal approximation when (Kosko, 1992): – min t-norm in antecedent – rule aggregation via ordinary sum – symmetric consequent membership functions – sup-min compositional rule of inference – pointwise inputs – centroid defuzzification (additive models) Pedrycz and Gomide, FSE 2007
� Universal approximation with (Castro, 1995): – arbitrary t-norm in antecedent – rule semantics: r-implications or conjunctions – triangular or trapezoidal membership functions – sup-min compositional rule of inference – pointwise inputs – centroid defuzzification Pedrycz and Gomide, FSE 2007
11.7 Development of rule-based systems Pedrycz and Gomide, FSE 2007
Expert-based development � Knowledge provided by domain experts – basic concepts and variables – links between concepts and variables to form rules � Reflects existing knowledge – can be readily quantified – short development time Pedrycz and Gomide, FSE 2007
Example: fuzzy control y u e + Fuzzy r Process Controller − R i : If Error is A i and Change of Error is B i then Control is C i R i : If e is A i and de is B i then u is C i Pedrycz and Gomide, FSE 2007
R i : If e is A i and de is B i then u is C i y r e t Change of Error ( de ) / Error ( e ) NM NS ZE PS PM NB PM NB NB NB NM NM PM NB NS NM NM NS PM NS Z NS NM Z PM NS Z NS NM PS PM PS Z NS NM PM PM PM PS PM NM PB PM PM PM PM NM Pedrycz and Gomide, FSE 2007
Data-driven development � Given a finite set of input/output pairs {( x k , y k ), k = 1,..., M } x k = [ x 1 k , x 2 k ,...., x nk ] ∈ R n z k = [ x k , y k ] ∈ R n +1 , k = 1,..., M � Clustering z k = [ x k , y k ] ∈ R n +1 , k = 1,..., M (e.g. using FCM) v 1 , v 2 ,...., v N prototypes/cluster centers v i ∈ R n +1 , i = 1,..., N � Idea: fuzzy clusters ≡ fuzzy rules Pedrycz and Gomide, FSE 2007
Example R 3 R 2 v 3 v 2 R 4 R 1 v 4 v 1 Pedrycz and Gomide, FSE 2007
� Projecting the prototypes in the input and output spaces v 1 [ y ], v 2 [ y ],...., v N [ y ] projections of prototypes in Y v 1 [ x ], v 2 [ x ],...., v N [ x ] projections of prototypes in X � R i : If X is A i then Y is C i , i = 1,..., N y y y x x x Pedrycz and Gomide, FSE 2007
11.8 Parameter estimation for functional rule-based systems Pedrycz and Gomide, FSE 2007
� Functional fuzzy rules � R i : If X i 1 is A i 1 and ... and X in is A in then z = a i o + a i 1 x 1 + ....+ a in x n i = 1,..., N � Given input/output data: {( x 1 , y 1 ), ( x 2 , y 2 ),....,( x M , y M )} � Let a i = [ a i o , a i 1 , a i 2 ,...., a in ] T � Output of functional models N λ ( ) x ∑ = x a = i k ( ) ˆ y w f , , w k ik i k i ik N = ∑ 1 i λ ( ) x i k = 1 i � Output for linear consequents N = ∑ T T T z a z = x [ 1 ] y ˆ , , w k i ik ik ik k = 1 i Pedrycz and Gomide, FSE 2007
Let a a 1 1 [ ] a a 2 2 T T T a z z z = = � y ˆ k 1 2 k k Nk � � a a N N and T T T z z z � y ˆ 1 11 12 1 N T T T z z z ˆ y � 2 y = = 12 22 2 Z N � � � � � T T T z z z y ˆ � M NM 1 2 M M then y = Z a Pedrycz and Gomide, FSE 2007
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.