Sequential techniques for Hypothesis testing & Change detection - PowerPoint PPT Presentation
Sequential techniques for Hypothesis testing & Change detection George V. Moustakides University of Patras Outline Sequential hypothesis testing The Sequential Probability Ratio Test (SPRT) for optimum hypothesis testing
Sequential techniques for Hypothesis testing & Change detection George V. Moustakides University of Patras
Outline � Sequential hypothesis testing � The Sequential Probability Ratio Test (SPRT) for optimum hypothesis testing � Intrusion detection in wireless networks � Sequential change detection � Performance criteria and optimum detection rules � Lorden’s criterion and the CUSUM test � Decentralized detection of changes KTH: Sequential techniques for Hypothesis testing & Change detection 2
Sequential hypothesis testing Conventional binary hypothesis testing (fixed sample size): Collection of observations ξ 1 ,..., ξ K H 0 : ξ 1 ,..., ξ K ~ f 0 ( ξ 1 ,..., ξ K ); H 1 : ξ 1 ,..., ξ K ~ f 1 ( ξ 1 ,..., ξ K ); Decision rule D ( ξ 1 ,..., ξ K ) ∈ { 0,1 } P ( D =1 | H 1 ) (Correct decision) P ( D =1 | H 0 ) (Type I error) P ( D =0 | H 1 ) (Type II error) P ( D =0 | H 0 ) (Correct decision) KTH: Sequential techniques for Hypothesis testing & Change detection 3
Bayes formulation Pr. Err. ( D ) = P ( H 0 ) P ( D =1 | H 0 )+ P ( H 1 ) P ( D =0 | H 1 ) min D Pr. Err. ( D ) Neyman-Pearson formulation max D P ( D =1 | H 1 ) subject to P ( D =1 | H 0 ) 6 α Likelihood ratio test: Likelihood ratio test: For i.i.d i.i.d.: .: For KTH: Sequential techniques for Hypothesis testing & Change detection 4
Sequential binary hypothesis testing Observations ξ 1 ,..., ξ t ,... are supplied sequentially . H 0 : ξ 1 ,..., ξ t ,... ~ f 0 ( ξ 1 ,..., ξ t ,...) H 1 : ξ 1 ,..., ξ t ,... ~ f 1 ( ξ 1 ,..., ξ t ,...) Time Observations 1 ξ 1 D ( ξ 1 ) 2 ξ 1 , ξ 2 D ( ξ 1 , ξ 2 ) ... ... ... t ξ 1 ,..., ξ t D ( ξ 1 ,..., ξ t ) ... ... ... Decide reliably as soon as possible . KTH: Sequential techniques for Hypothesis testing & Change detection 5
We apply a two-rule scheme: 1 st Rule Time Observations make a 1 make a Can ξ Can ξ 1 Yes No 1 ξ 1 Stopping Rule Stopping Rule reliable decision? reliable decision? 2 ξ 1 , ξ 2 T ( ξ 1 ,..., ξ t )= { stop , continue } ... ... T ξ 1 ,..., ξ T We stop receiving Time T T is is Time observations RANDOM RANDOM 2 nd Rule Decision Rule Decision Rule D ( ξ 1 ,..., ξ T ) ∈ { 0,1 } KTH: Sequential techniques for Hypothesis testing & Change detection 6
WHY sequential? WHY sequential? For the same level of confidence with a sequential test we need , in the average, (significantly) less samples than a fixed sample size test, to reach a decision. The Sequential Probability Ratio Test (SPRT) (Wald 1947) Changes with Changes with time time For i.i.d. We define two thresholds A< 0 <B KTH: Sequential techniques for Hypothesis testing & Change detection 7
Decision in favor of H 1 B u t T t 0 A Decision in favor of H 0 Stopping rule: Decision rule: KTH: Sequential techniques for Hypothesis testing & Change detection 8
Remarkable optimality property of SPRT AND AND subject to � Optimum for i.i.d. observations (Wald and Wolfowitz, 1948) � Brownian Motion with constant drift (Shiryayev, 1967) � Homogeneous Poisson (Peskir, Shiryayev, 2000) � Open problems: Dependent observations, multiple hypothesis testing KTH: Sequential techniques for Hypothesis testing & Change detection 9
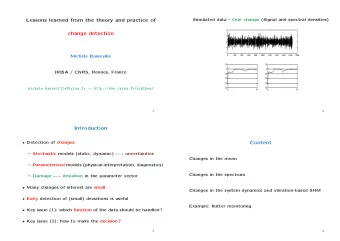
Misbehavior detection in wireless networks (with Radosavac and Baras) MAC Layer: When the channel is not in use, nodes wait a random (back-off) time and then reserve the channel. � The node with the smaller back-off time reserves the channel first. � Back-off times of legitimate nodes are distributed according to the known uniform distribution f 0 = U [0, W ] . � Attacker’s goal is to reserve the channel more often than the legitimate users. Back-off distribution f 1 =? is unknown . Use back-off time measurements to detect attacker! KTH: Sequential techniques for Hypothesis testing & Change detection 10
For each node we measure back-off times (observations) sequentially and we decide whether it is legitimate ( H 0 ) or attacker ( H 1 ) . Candidate test: SPRT Not directly applicable, since we don’t know f 1 Quantification of an “attack” N legitimate nodes have probability 1/ N of reserving the channel. A node is characterized as “attacker” if its probability of reserving the channel is at least η / N , where η > 1. Example: η = 1.1 means that a node “attacks” if it reserves the channel 10% more than a legitimate node. KTH: Sequential techniques for Hypothesis testing & Change detection 11
Probability of reserving the channel > η / N m Defines a CLASS CLASS F of possible attack densities where ² < 1 a quantity that depends on η . Optimization problem subject to SPRT with KTH: Sequential techniques for Hypothesis testing & Change detection 12
The Sequential change detection problem Also known as the Disorder problem or the Change- Point problem or the Quickest Detection problem. Change of Statistics τ Time Detect as soon as possible Detect as soon as possible KTH: Sequential techniques for Hypothesis testing & Change detection 13
Applications Monitoring of quality of manufacturing process (1930’s) Biomedical Engineering Electronic Communications Econometrics Seismology Speech & Image Processing Vibration monitoring Security monitoring (fraud detection) Spectrum monitoring Scene monitoring Network monitoring and diagnostics (router failures, intruder detection) Databases ..... KTH: Sequential techniques for Hypothesis testing & Change detection 14
Mathematical setup We are observing sequentially a process { ξ t } with the following statistics: for 0 < t 6 τ ~ f 0 ξ t ~ f 1 for τ < t Goal: Detect the change time Detect the change time τ τ “ “ as soon as possible as soon as possible ” ” Goal: � Change time τ : deterministic (but unknown) or random � Densities f 0 , f 1 : known KTH: Sequential techniques for Hypothesis testing & Change detection 15
The observation process { ξ t } is available sequentially. Interested in sequential detection schemes . � At every time instant t we perform a test to decide whether to stop (and issue an alarm) or continue sampling. � The test at time t must be based on the available information up to time t (and not any future information). Any sequential detection scheme is nothing but a stopping rule T that decides when to stop. KTH: Sequential techniques for Hypothesis testing & Change detection 16
Overview of existing results Optimality criteria They must take into account two quantities: - Detection delay T - τ - Frequency of false alarms Possible approaches: Bayesian and Min Bayesian and Min- -max max Bayesian approach (Shiryayev 1978) The change time τ is random with geometric prior. Pro[ τ = t ]=(1- $ ) $ t For any stopping rule T define the criterion: J ( T ) = c E [ ( T - τ ) + ]+ P [ T 6 τ ] KTH: Sequential techniques for Hypothesis testing & Change detection 17
Optimization problem: inf T J ( T ) Define the statistics: π t = P [ τ 6 t | ξ 1 ,..., ξ t ] Stopping rule: T S = inf t { t : π t > ν } - Discrete time: when { ξ t } is i.i.d. and there is a change in the pdf from f 0 ( ξ ) to f 1 ( ξ ). - Continuous time: when { ξ t } is a Brownian Motion and there is a change in the constant drift; or a Poisson process and there is a change in the constant rate. Stochastic differential equation KTH: Sequential techniques for Hypothesis testing & Change detection 18
Min-max approach (Pollak, 1985) The change time τ is deterministic but unknown. For any stopping rule T define the criterion: J ( T ) = sup τ E 1 [ ( T - τ ) + | T > τ ] Optimization problem: inf T J ( T ) ; subject to: E 0 [ T ] > γ Discrete time: when { ξ t } is i.i.d. and there is a change in the pdf from f 0 ( ξ ) to f 1 ( ξ ). f 1 ( ξ t ) Compute the statistics: S t = ( S t -1 + 1) . f 0 ( ξ t ) Stopping rule: T P = inf t { t : S t > ν } Mei (2006) KTH: Sequential techniques for Hypothesis testing & Change detection 19
CUSUM test and Lorden’s criterion Page (1954) introduced the CUmulative SUM (CUSUM) test for i.i.d. observations. Suppose we are given ξ 1 , ... , ξ t . Form a likelihood ratio test for the following two hypotheses: H 0 : All observations are under the nominal regime H 1 : There is a change at τ < t Assume τ unknown KTH: Sequential techniques for Hypothesis testing & Change detection 20
Define the CUSUM process y t as follows: y t = u t – m t where m t = inf 0 6 s 6 t u s . The CUSUM stopping rule: S = inf t { t : y t > ν } For the i.i.d. case we have a convenient recursion: KTH: Sequential techniques for Hypothesis testing & Change detection 21
u t m t S ML estimate of τ ML estimate of τ KTH: Sequential techniques for Hypothesis testing & Change detection 22
Min-max criterion (Lorden, 1971): Optimization problem: inf T J ( T ) ; subject to: E 0 [ T ] > γ . � For i.i.d. observations (Lorden, 1971), asymptotic optimality. c � For i.i.d. o b servations (Moustakides 1986 and Ritov 1990). � Brownian Motion with constant drift (Shiryayev 1996, Beibel 1996). Ito processes (Moustakides 2004) � Homogeneous Poisson (Moustakides, >2009) � Change-time models and performance criteria (Moustakides 2008) � Open problems: Dependency, multiple change possibilities KTH: Sequential techniques for Hypothesis testing & Change detection 23
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.