SAT Approximations of PSPACE Problems for Cellular Reprogramming Loïc Paulevé CNRS/LRI, Univ. Paris-Sud, Univ. Paris-Saclay – BioInfo team loic.pauleve@lri.fr http://loicpauleve.name Journées BIOSS-IA - 23 Juin 2017
SAT Approximations of PSPACE Problems for Cellular Reprogramming Cellular Dynamics Cell state of interest Cell state at t=0 Initial state(s)/Goal state(s) • Trajectory existence (reachability) • Reasoning on all trajectories: e.g., common features • Control : perturbations to avoid/enforce goal reachability Loïc Paulevé 2/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Cellular Dynamics Cell state of interest Cell state at t=0 Initial state(s)/Goal state(s) • Trajectory existence (reachability) • Reasoning on all trajectories: e.g., common features • Control : perturbations to avoid/enforce goal reachability Loïc Paulevé 2/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Cellular Dynamics Cell state of interest Cell state at t=0 Initial state(s)/Goal state(s) • Trajectory existence (reachability) • Reasoning on all trajectories: e.g., common features • Control : perturbations to avoid/enforce goal reachability Loïc Paulevé 2/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Cellular Dynamics Cell state of interest Cell state at t=0 Initial state(s)/Goal state(s) • Trajectory existence (reachability) • Reasoning on all trajectories: e.g., common features • Control : perturbations to avoid/enforce goal reachability Loïc Paulevé 2/9
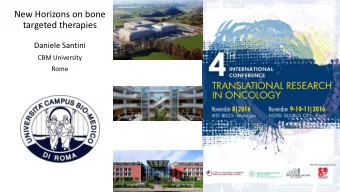
SAT Approximations of PSPACE Problems for Cellular Reprogramming Qualitative Models for Cellular Reprogramming (source: Crespo et al. Stem cells 2013; 31:2127-2135) 011 111 b 010 110 a c 001 101 f a ( x ) = x c ∨ ( ¬ x a ∧ ¬ x b ) 000 100 f b ( x ) = ¬ x a ∨ x b f c ( x ) = x c ∨ ( x a ∧ ¬ x b ) Loïc Paulevé 3/9
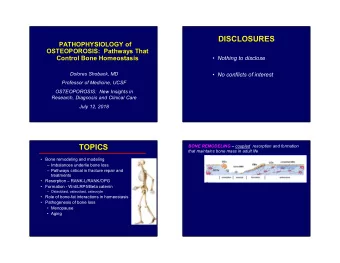
SAT Approximations of PSPACE Problems for Cellular Reprogramming PSPACE problems for cellular reprogramming Examples {a=0,b=1} goal state(s) goal state(s) initial state(s) initial state(s) reachability cut sets KO b c 0 -> 1 when b=1 (lock b=0) c 0 -> 1 when b=1 goal state(s) goal state(s) initial state(s) initial state(s) mutations bifurcations Loïc Paulevé 4/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming State Transition Graph initial state state reaching goal goal state (e.g., c=2) ⇒ avoid building it! (even symbolically): abstractions Loïc Paulevé 5/9
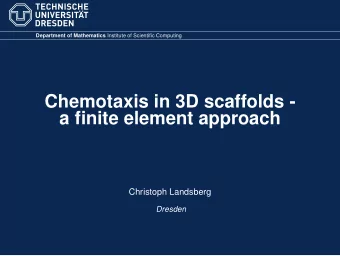
SAT Approximations of PSPACE Problems for Cellular Reprogramming Local Causality Graph (LCG) • Initial state s = { a �→ 0 ; b �→ 0 ; c �→ 0 ; d �→ 0 } . c 2 Node state State change c 0 � c 2 Local cause - prior steps a 1 a 0 � a 1 d 1 b 0 a 1 � a 1 d 0 � d 1 b 0 � b 0 e 1 e 0 � e 1 Loïc Paulevé 6/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Local Causality Graph (LCG) • Initial state s = { a �→ 0 ; b �→ 0 ; c �→ 0 ; d �→ 0 } . c 2 Node state State change c 0 � c 2 Local cause - prior steps a 1 a 0 � a 1 d 1 b 0 Necessary condition for reachability OA( s → ∗ c 2 ) ≡ there is an acyclic traversal from c 2 s.t. • node state change → follow at least one child; a 1 � a 1 d 0 � d 1 b 0 � b 0 • other nodes → follow all children; • terminates on empty “local cause” (leafs). e 1 e 0 � e 1 (can be verified linearly in the size of the LCG). Loïc Paulevé 6/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Local Causality Graph (LCG) • Initial state s = { a �→ 0 ; b �→ 0 ; c �→ 0 ; d �→ 0 } . c 2 Node state State change c 0 � c 2 Local cause - prior steps a 1 a 0 � a 1 d 1 b 0 a 1 � a 1 d 0 � d 1 b 0 � b 0 e 1 e 0 � e 1 Loïc Paulevé 6/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Local Causality Graph (LCG) • Initial state s = { a �→ 0 ; b �→ 0 ; c �→ 0 ; d �→ 0 } . c 2 Node state State change c 0 � c 2 Local cause - prior steps a 1 a 0 � a 1 d 1 b 0 a 1 � a 1 d 0 � d 1 b 0 � b 0 Sufficient condition for reachability UA( s → ∗ c 2 ) ≡ ∃ particular acyclic sub-LCG e 1 e 0 � e 1 NP formulation (find the right combination of local paths). Loïc Paulevé 6/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Local Causality Graph (LCG) • Initial state s = { a �→ 0 ; b �→ 0 ; c �→ 0 ; d �→ 0 } . c 2 Node state State change c 0 � c 2 Local cause - prior steps a 1 a 0 � a 1 d 1 b 0 a 1 � a 1 d 0 � d 1 b 0 � b 0 Formal approximations of reachability UA( s → ∗ c 2 ) ⇒ s → ∗ c 2 ⇒ OA( s → ∗ c 2 ) e 1 e 0 � e 1 Loïc Paulevé 6/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Summary of the approach Abstract interpretation of automata networks (1-bounded Petri nets) • LCG is P w/ nb automata; EXP w/ nb discrete levels (generally 2-5). note: if from Boolean networks, translation is EXP w/ in-degree • Verifying OA is P; UA is NP (with LCG size) • SAT implementation of LCG generation and UA / OA . • Very low number of variables compared to nb reachable states ⇒ highly tractable for large networks of small automata Compared to Bounded Model-Checking (BMC): • BMC is an under-approximation only, no necessary condition • Can lead to a huge, when not intractable, number of variables (states reachable in less than n transitions) • Incomplete capture of trajectories (important for control) Loïc Paulevé 7/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Summary of the approach Abstract interpretation of automata networks (1-bounded Petri nets) • LCG is P w/ nb automata; EXP w/ nb discrete levels (generally 2-5). note: if from Boolean networks, translation is EXP w/ in-degree • Verifying OA is P; UA is NP (with LCG size) • SAT implementation of LCG generation and UA / OA . • Very low number of variables compared to nb reachable states ⇒ highly tractable for large networks of small automata Compared to Bounded Model-Checking (BMC): • BMC is an under-approximation only, no necessary condition • Can lead to a huge, when not intractable, number of variables (states reachable in less than n transitions) • Incomplete capture of trajectories (important for control) Loïc Paulevé 7/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Examples of Formal Approximations Reachability [LP, M Magnin, O Roux in MSCS 2012; M Folschette, LP, M Magnin, O Roux in TCS 2015] • Over-approximation (necessary condition): OA( s → ∗ g ) • Under-approximation (sufficient condition): UA( s → ∗ g ) Cut-sets [LP, G Andrieux, H Koeppl at CAV 2013] • UA: a i , b j , · · · : disable( a i , b j , · · · ) ∧ ¬ OA( s → ∗ g ) Mutations for blocking g • UA: a i , b j , · · · : lock( a i , b j , · · · ) ∧ ¬ OA( s → ∗ g ) Bifurcations [L F Fitime, C Guziolowski, O Roux, LP in BMC Algorithms for Mol Bio, 2017] • UA: s b , t b : UA( s → ∗ s b ) ∧ UA( s b → ∗ g ) ∧ ¬ OA( s b · t b → ∗ g ) Implemented in Pint - http://loicpauleve.name/pint • Input: Boolean/discrete networks; automata networks; 1-bounded Petri nets • ASP implementation for solution enumeration (clingo) • Scalable to networks between 100 to 10,000 variables Loïc Paulevé 8/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Examples of Formal Approximations Reachability [LP, M Magnin, O Roux in MSCS 2012; M Folschette, LP, M Magnin, O Roux in TCS 2015] • Over-approximation (necessary condition): OA( s → ∗ g ) • Under-approximation (sufficient condition): UA( s → ∗ g ) Cut-sets [LP, G Andrieux, H Koeppl at CAV 2013] • UA: a i , b j , · · · : disable( a i , b j , · · · ) ∧ ¬ OA( s → ∗ g ) Mutations for blocking g • UA: a i , b j , · · · : lock( a i , b j , · · · ) ∧ ¬ OA( s → ∗ g ) Bifurcations [L F Fitime, C Guziolowski, O Roux, LP in BMC Algorithms for Mol Bio, 2017] • UA: s b , t b : UA( s → ∗ s b ) ∧ UA( s b → ∗ g ) ∧ ¬ OA( s b · t b → ∗ g ) Implemented in Pint - http://loicpauleve.name/pint • Input: Boolean/discrete networks; automata networks; 1-bounded Petri nets • ASP implementation for solution enumeration (clingo) • Scalable to networks between 100 to 10,000 variables Loïc Paulevé 8/9
SAT Approximations of PSPACE Problems for Cellular Reprogramming Current projects and perspectives ANR-FNR 2017-2020 “AlgoReCell” (porteur) Computational Models and Algorithms for the Prediction of Cell Reprogramming Determinants • Partners: LRI, LSV, Curie, Univ Luxembourg • Application to trans-differentiation from adipocytes to osteoblasts • Experimental validations Towards predictions for Temporal Reprogramming of Boolean networks [H Mandon, S Haar, LP at CMSB 2017] • Theoretical framework for Boolean network control • Explore use of incremental SAT and Just-in-time compilation of knowledge bases Other research directions: • Parametric models (uncertainty on model specification), • .. combine with model reduction which preserves reachability properties [LP at CMSB 2016; T Chatain, LP at CONCUR 2017] • Quantify number of trajectories from abstraction, . . . Loïc Paulevé 9/9
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries

![Interactive Proofs Lecture 19 And Beyond 1 So far 2 So far IP = PSPACE = AM[poly] 2 So far](https://c.sambuz.com/1028644/interactive-proofs-s.webp)