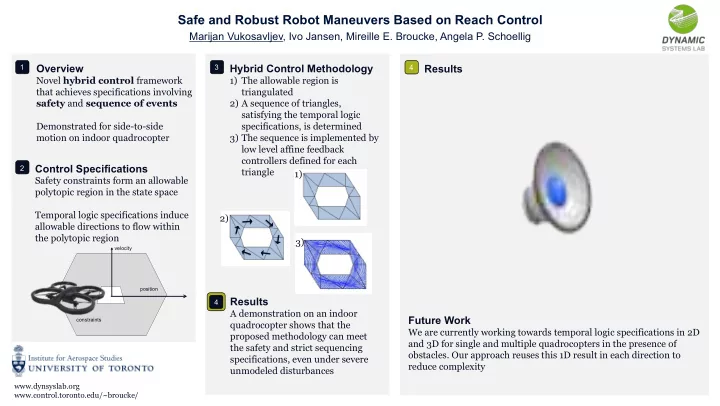
Safe and Robust Robot Maneuvers Based on Reach Control Marijan Vukosavljev, Ivo Jansen, Mireille E. Broucke, Angela P. Schoellig Overview Hybrid Control Methodology Results 1 3 4 Novel hybrid control framework 1) The allowable region is that achieves specifications involving triangulated safety and sequence of events 2) A sequence of triangles, satisfying the temporal logic Demonstrated for side-to-side specifications, is determined motion on indoor quadrocopter 3) The sequence is implemented by low level affine feedback controllers defined for each Control Specifications 2 triangle 1) Safety constraints form an allowable polytopic region in the state space Temporal logic specifications induce 2) allowable directions to flow within the polytopic region 3) velocity position Results 4 A demonstration on an indoor Future Work constraints quadrocopter shows that the We are currently working towards temporal logic specifications in 2D proposed methodology can meet and 3D for single and multiple quadrocopters in the presence of the safety and strict sequencing obstacles. Our approach reuses this 1D result in each direction to specifications, even under severe reduce complexity unmodeled disturbances www.dynsyslab.org www.control.toronto.edu/~broucke/
Safe and Robust Robot Maneuvers Based on Reach Control Marijan Vukosavljev, Ivo Jansen, Mireille E. Broucke, Angela P. Schoellig Overview Hybrid Control Methodology Control Specifications - Application 1 3 2 Novel hybrid control framework 1) The allowable region is Modeling : Objective : transport the quadrocopter that achieves specifications involving triangulated Reduced dynamics back and forth along the x -direction safety and sequence of events 2) A sequence of triangles, in x -direction are Safety : satisfying the temporal logic • (S1) room wall boundaries Demonstrated for side-to-side specifications, is determined x = g tan θ := u, ¨ • (S2) speed limit motion on indoor quadrocopter 3) The sequence is implemented by • (S3) deceleration towards walls where the input to low level affine feedback Liveness : design is the pitch controllers defined for each θ • (L1) minimum cruise speed angle, Control Specifications 2 triangle 1) • (L2) and (L3) turnaround acceleration Safety constraints form an allowable Desired Temporal Sequence : The other directions polytopic region in the state space • (T1) pass through B right and B left are stabilized in a alternatingly standard way Temporal logic specifications induce 2) allowable directions to flow within ˙ the polytopic region x 3) velocity (S2) (S3) position (L1) Results 4 B left (L2) A demonstration on an indoor x constraints B right (L3) quadrocopter shows that the proposed methodology can meet the safety and strict sequencing (S1) (T1) specifications, even under severe unmodeled disturbances www.dynsyslab.org www.control.toronto.edu/~broucke/
Safe and Robust Robot Maneuvers Based on Reach Control Marijan Vukosavljev, Ivo Jansen, Mireille E. Broucke, Angela P. Schoellig Overview Hybrid Control Methodology Hybrid Control Methodology - Application 1 3 3 Novel hybrid control framework 1) The allowable region is 1) Triangulation into 20 v 2 ˆ v 3 ˆ v 4 ˆ 2 that achieves specifications involving triangulated triangles S 3 S 5 1.5 safety and sequence of events 2) A sequence of triangles, S 6 S 4 satisfying the temporal logic 1 S 2 2) A sequence of triangles to v 5 ˆ , S 1 Demonstrated for side-to-side specifications, is determined v 12 ˆ v 13 ˆ 0.5 S 7 S 8 S 18 reach the right side. x ( m/s ) S 17 motion on indoor quadrocopter 3) The sequence is implemented by v 1 ˆ v 11 ˆ v 14 ˆ v 6 ˆ Symmetry is used to 0 , S 19 low level affine feedback S 16 ˙ S 20 implement moving to the S 15 -0.5 v 16 ˆ v 15 ˆ controllers defined for each S 9 v 10 ˆ left. Automation of this S 10 Control Specifications 2 -1 triangle S 12 1) S 14 procedure is formalized in Safety constraints form an allowable -1.5 S 13 S 11 [1] polytopic region in the state space . v 9 ˆ v 8 ˆ v 7 ˆ -2 -3 -2 -1 0 1 2 3 x ( m ) 3) Affine feedback controllers Temporal logic specifications induce 2) 2.5 constructed on each allowable directions to flow within 2 triangle. Overall results in the polytopic region 3) 1.5 a closed-loop behavior velocity 1 satisfying the safety and 0.5 x ( m/s ) temporal specifications 0 ˙ -0.5 position -1 Results 4 -1.5 A demonstration on an indoor -2 constraints quadrocopter shows that the -2.5 proposed methodology can meet -3 -2 -1 0 1 2 3 x ( m ) the safety and strict sequencing Nominal closed-loop response Left-to-right closed-loop response specifications, even under severe unmodeled disturbances [1] M. Kloetzer and C. Belta, “A fully automated framework for control of linear systems from temporal logic specifications,” IEEE Transactions www.dynsyslab.org on Automatic Control, vol. 53, no. 1, pp. 287-297, 2008. www.control.toronto.edu/~broucke/
Safe and Robust Robot Maneuvers Based on Reach Control Marijan Vukosavljev, Ivo Jansen, Mireille E. Broucke, Angela P. Schoellig Overview Hybrid Control Methodology Hybrid Control Methodology – Reach Control Problem 1 3 3 Novel hybrid control framework 1) The allowable region is The Reach Control Problem (RCP) that achieves specifications involving triangulated safety and sequence of events 2) A sequence of triangles, Given a simplex with a specified exit facet satisfying the temporal logic F 0 (e.g. F 0 ) and restricted facets (e.g. F 1 and Demonstrated for side-to-side specifications, is determined F 1 F 2 ), solving the RCP determines an affine motion on indoor quadrocopter 3) The sequence is implemented by feedback controller such that trajectories low level affine feedback starting in the simplex only leave through controllers defined for each the exit facet Control Specifications 2 F 2 triangle 1) Safety constraints form an allowable polytopic region in the state space Quadropter Application Temporal logic specifications induce Affine feedback control law in terms of 2) allowable directions to flow within position and velocity: the polytopic region . 3) u = k 1 x + k 2 ˙ x + k 3 . velocity Gains determined by interpolating feasible control values selected at simplex vertices position Results 4 A demonstration on an indoor L.C.G.J.M. Habets and J.H. van Schuppen, “A control problem for affine dynamical systems constraints quadrocopter shows that the on a full-dimensional polytope,” Automatica, vol. 40, no. 1, pp. 21-35, 2004. proposed methodology can meet B. Roszak and M. E. Broucke, “Necessary and sufficient conditions for reachability on a the safety and strict sequencing simplex,” Automatica, vol. 42, no. 11, pp. 1913-1918, 2006. specifications, even under severe M.E. Broucke and M. Ganness, “Reach control on simplices by piecewise affine feedback,” unmodeled disturbances SIAM Journal on Control and Optimization, vol. 52, no. 5, pp. 3261 - 3286, 2014. www.dynsyslab.org www.control.toronto.edu/~broucke/
Safe and Robust Robot Maneuvers Based on Reach Control Marijan Vukosavljev, Ivo Jansen, Mireille E. Broucke, Angela P. Schoellig Overview Hybrid Control Methodology Results 1 3 4 Novel hybrid control framework 1) The allowable region is Standard Tracking Aproach that achieves specifications involving triangulated 3 safety and sequence of events 2) A sequence of triangles, Right side 1: Nominal . ight Reference Trajectory 3. Manually pushed 2 satisfying the temporal logic 1 Demonstrated for side-to-side specifications, is determined x ( m ) Landed 0 Take-o , motion on indoor quadrocopter 3) The sequence is implemented by -1 Left side low level affine feedback -2 2. Manually held controllers defined for each -3 0 50 100 Control Specifications 2 triangle t ( s ) 1) Hybrid Control Approach Safety constraints form an allowable polytopic region in the state space 3 Right side 3. Manually pushed 1: Nominal . ight 2 1 Temporal logic specifications induce 2) x ( m ) Landed 0 Take-o , allowable directions to flow within -1 Left side the polytopic region -2 2. Manually held RCP started 3) -3 velocity 0 20 40 60 80 100 t ( s ) 2. & 3. Manual Holds and Push 2 1.5 position Results 1 4 A demonstration on an indoor 0.5 x ( m=s ) constraints quadrocopter shows that the 0 proposed methodology can meet _ -0.5 the safety and strict sequencing -1 specifications, even under severe -1.5 unmodeled disturbances -2 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 www.dynsyslab.org x ( m ) www.control.toronto.edu/~broucke/
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries