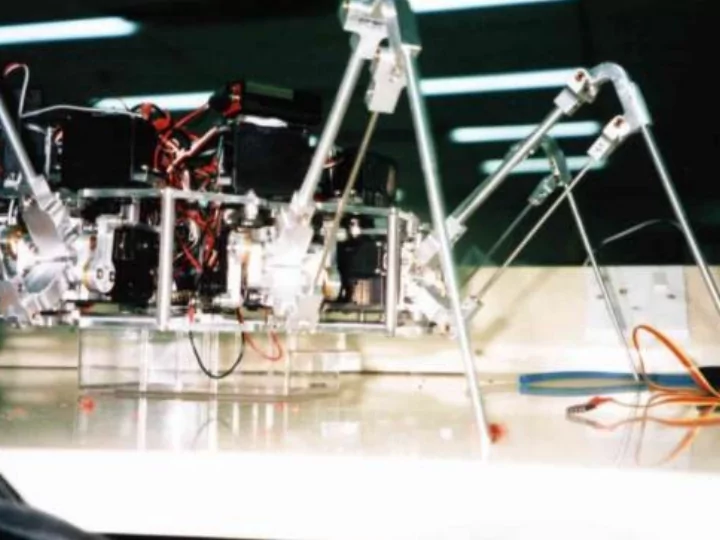
Control of an 8-legged, 24 DOF, Control of an 8-legged, 24 DOF, Mechatronic Robot Mechatronic Robot Brian Lim Youliang Kuvesvaran s/o Paramasivan National Junior College Assoc. Prof. Dr. Malcolm Francis John Nickols Nanyang Technological University 07/31/07 2
Project Goals Project Goals To investigate into biomimetics – mimicking of biological organisms To apply legged motion to robots – advantageous for traversing over undulating terrain
Body Body Structure Structure
Leg Leg Structure Structure
Plan View of Plan View of 0 ° Motion Motion 135 ° 45 ° 0 7 1 -90 ° 90 ° 6 2 3 5 4 -135 ° -45 ° 180 °
Phase Difference Phase Difference leg air ground 0 1 2 3 4 5 6 7 time sequence
Circuitry Circuitry
Future Developments Future Developments Motion extension to: – movement in 7 other directions – rotation about centre Applications: – as reconnaissance vehicles – as toys
Demonstration The End
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries










![arXiv:cs/0009007v1 [cs.LG] 13 Sep 2000 Abstract In real-world environments it usually is](https://c.sambuz.com/799877/arxiv-cs-0009007v1-cs-lg-13-sep-2000-s.webp)