Probabilistic Fundamentals in Robotics Pr Pr obabilistic Mode ls - PDF document
21/05/2012 Probabilistic Fundamentals in Robotics Pr Pr obabilistic Mode ls of Mobile Robots obabilistic Mode ls of Mobile Robots Robot Motion Robot Motion Basilio Bona DAUIN Politecnico di Torino Course Outline Basic mathematical
21/05/2012 Probabilistic Fundamentals in Robotics Pr Pr obabilistic Mode ls of Mobile Robots obabilistic Mode ls of Mobile Robots Robot Motion Robot Motion Basilio Bona DAUIN – Politecnico di Torino Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot localization problem Robotic mapping Probabilistic planning and control Reference textbook Thrun, Burgard, Fox, “Probabilistic Robotics”, MIT Press, 2006 http://www.probabilistic ‐ robotics.org/ Basilio Bona 2 1
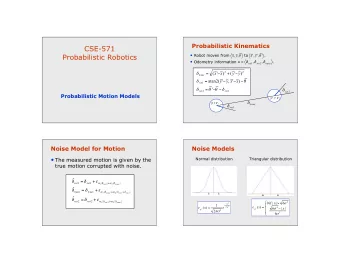
21/05/2012 Probabilistic models of mobile robots Robot motion – Kinematics – Velocity motion model Velocity motion model – Odometry motion model Robot perception – Maps – Beam model of laser range finders – Correlation ‐ based measurement models Correlation based measurement models – Feature ‐ based measurement models Basilio Bona 3 Introduction Basilio Bona 4 2
21/05/2012 Kinematic states y t ( ) orientation q ( ) t x t ( ) Basilio Bona 5 Probabilistic kinematics control State (pose or location) In applications, controls are sometimes provided by rover odometry From Wikipedia: Odometry is the use of data from the movement of actuators to estimate change in position over time. Odometry is used by some robots to estimate their position relative to a starting location. The method is sensitive to errors due to the integration of velocity measurements over time The method is sensitive to errors due to the integration of velocity measurements over time to give position estimates. Rapid and accurate data collection, equipment calibration, and processing are required in most cases for odometry to be used effectively. Basilio Bona 6 3
21/05/2012 Example y y x x darker points show higher probabilities of being there the orientation is not shown, but contributes to the uncertainty of the final location Basilio Bona 7 Motion models Velocity model: the simplest one, assumes that the control is given as a velocity command to the motors; velocity remain constant in the sampling interval [ t ‐ 1 t ) sampling interval [ t 1, t ) Acceleration model: is slightly more complicated, assuming a constant acceleration motion, i.e., a linearly increasing velocity Odometric model: assumes the accessibility to odometric Odometric model: assumes the accessibility to odometric information, usually provided by wheel sensors, but often also by other means (i.e., visual odometry) Basilio Bona 8 4
21/05/2012 Motion models Odometric models are usually more accurate than velocity models, but odometry is available only after the motion command has been executed, while velocity commands are available before performing the actual motion Odometric models are good for estimation, while velocity models are better suited for path planning Basilio Bona 9 Velocity motion model Basilio Bona 10 5
21/05/2012 Velocity motion model: noise ‐ free ( ) T = q x x y t t t t ( ( ) ) T T u = v w t t t y t r q t t y c q - 90 t x x c t Basilio Bona 11 Velocity motion model: noise ‐ free x t v = r t x t w t - 1 D q t c D is negative D is negative q q Basilio Bona 12 6
21/05/2012 Exact velocity model Basilio Bona 13 Velocity models Exact Euler Runge ‐ Kutta Basilio Bona 14 7
21/05/2012 Velocity models Exact Euler R Runge ‐ Kutta K tt Basilio Bona 15 Odometry errors Basilio Bona 16 8
21/05/2012 Error noise Basilio Bona 17 Velocity model with error noise Basilio Bona 18 9
21/05/2012 Velocity motion model algorithm Basilio Bona 19 Example Basilio Bona 20 10
21/05/2012 Odometry motion model Odometry is obtained integrating sensor reading from wheel encoders, or from other sources (e.g., visual odometry) Odometry provides the information of the relative motion of y p the robot. Odometry is more accurate than velocity Odometry measurements are available only AFTER a control has been supplied to the robot, then they should be better considered as measurements, … but usually the are included , y as control signals u t For this reason odometry cannot be used for planning and control Basilio Bona 21 Odometry motion model Odometry model considers the motion in the time interval motion in the time interval 1. A first rotation 2. A translation 3. A second rotation Each of them is noisy Basilio Bona 22 11
21/05/2012 Odometry model Basilio Bona 23 Example Repeated application of the sensor model for short movements Typical banana ‐ shaped distributions obtained for 2D ‐ yp p projection of 3D posterior Basilio Bona 24 12
21/05/2012 Example Basilio Bona 25 Sampling One can use normal (Gaussian) distributions or triangular distributions for describing uncertainty and for sampling Normal distribution Normal distribution Triangular distribution Triangular distribution Basilio Bona 26 13
21/05/2012 How to Sample from Normal or Triangular Distributions? Sampling from a normal distribution Sampling from a triangular distribution Basilio Bona 27 Normally distributed samples Basilio Bona 28 14
21/05/2012 Triangular distributed samples 10 3 samples 10 4 samples 10 6 samples 10 5 samples Basilio Bona 29 Sample odometry motion model Sample normal distribution Basilio Bona 30 15
21/05/2012 Example Start Basilio Bona 31 Motion and maps In many cases we have a map m that represents the environment where the robot moves Occupacy maps distinguish free ( traversable ) from p y p g ( ) occupied space: robot pose shall be always in free space A motion model that takes into consideration a map computes Map ‐ based motion model If the map m carries information relevant to pose If the map m carries information relevant to pose estimation Basilio Bona 32 16
21/05/2012 Approximation Map ‐ free estimate Consistency on the pose with the map This is the result of checking model consistency at the final pose, instead of verifying it on the entire path to the goal Basilio Bona 33 Thank you. Any question? Basilio Bona 34 17
Recommend
















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.