CSE-571 Robot moves from to . Probabilistic - PowerPoint PPT Presentation
Probabilistic Kinematics CSE-571 Robot moves from to . Probabilistic Robotics x , y , x ' , y ' , ' Odometry information . u , , = rot 1 rot 2 trans
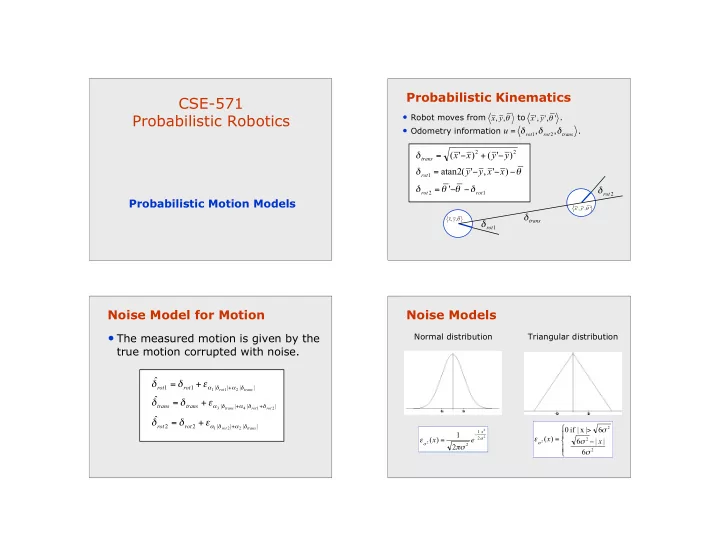
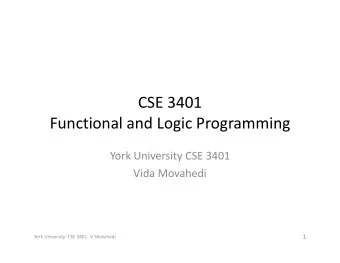
Probabilistic Kinematics CSE-571 • Robot moves from to . Probabilistic Robotics x , y , x ' , y ' , ' � � • Odometry information . u , , = � � � rot 1 rot 2 trans 2 2 ( x ' x ) ( y ' y ) � = � + � trans atan2 ( y ' y , x ' x ) � = � � � � rot 1 ' � = � � � � � � rot 2 rot 1 rot 2 Probabilistic Motion Models x ' , y ' , ' � � x , y , � trans � rot 1 Noise Model for Motion Noise Models • The measured motion is given by the Normal distribution Triangular distribution true motion corrupted with noise. ˆ � = � + � rot 1 rot 1 | | | | � � + � � 1 rot 1 2 trans ˆ � = � + � trans trans | | | | � � + � � + � 3 trans 4 rot 1 rot 2 ˆ � = � + � rot 2 rot 2 | | | | � � + � � � 2 1 rot 2 2 trans 0 if | x | 6 > � 1 x 2 1 � � ( x ) ( x ) e 2 2 � � = � = � � 6 2 | x | � � 2 2 � 2 2 �� � 2 6 � �
Sample-based Density Representation Probabilistic Kinematics • Odometry information is inherently noisy. • How can we model this uncertainty? p ( x|u,x’ ) x’ x’ u u Sample-based Motion Sample Odometry Motion Model 1. Algorithm sample_motion_model (u, x): u , , , x x , y , = � � � = � rot 1 rot 2 trans ˆ 1. sample( | | ) � = � + � � + � � rot 1 rot 1 1 rot 1 2 trans ˆ sample( (| | | |)) 2. � = � + � � + � � + � trans trans 3 trans 4 rot 1 rot 2 ˆ 3. sample( | | ) � = � + � � + � � rot 2 rot 2 1 rot 2 2 trans ˆ ˆ 4. x ' x cos( ) = + � � + � trans rot 1 ˆ ˆ y ' y sin( ) 5. = + � � + � Start trans rot 1 ˆ ˆ 6. ' � = � + � + � rot 1 rot 2 7. Return x ' , y ' , ' �
Examples (odometry based) Examples (velocity based) Motion Model with Map P ( x | u , x ' , m ) P ( x | m ) P ( x | u , x ' ) P ( x | u , x ' ) = � • When does this approximation fail?
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.