Practical Relative Degree in SMC systems: Frequency Domain Approach - PowerPoint PPT Presentation
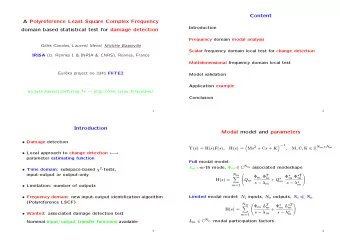
Practical Relative Degree in SMC systems: Frequency Domain Approach **Antonio Rosales, **Leonid Fridman and *Yuri Shtessel **National Autonomous University of Mexico, UNAM *University of Alabama in Huntsville, UAH July 13th International
Practical Relative Degree in SMC systems: Frequency Domain Approach **Antonio Rosales, **Leonid Fridman and *Yuri Shtessel **National Autonomous University of Mexico, UNAM *University of Alabama in Huntsville, UAH July 13th International Workshop on Variable Structure Systems Nantes, France A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 1 / 22
Outline Introduction 1 Problem Statement Practical Relative Degree 2 Performance Margins 3 Definition of Performance Margins Performance margins for conventional SMC Performance margins for 2-SM (Twisting Algorithm) Practical Relative Degree with Performance Margins Requirement 4 Conclusions 5 A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 2 / 22
Outline Introduction 1 Problem Statement Practical Relative Degree 2 Performance Margins 3 Definition of Performance Margins Performance margins for conventional SMC Performance margins for 2-SM (Twisting Algorithm) Practical Relative Degree with Performance Margins Requirement 4 Conclusions 5 A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 3 / 22
Introduction Relative Degree Unknown Model Frequency SMC Tolerance Chattering Domain Limits Unknown n Analysis Unmodeled Dynamics (Fractal) 4 Supposition Practical SMC “Sliding Relative 2-SMC Tolerance Frequency variable Degree . Limits Domain converge to ( k ) . Analysis a . Limit Cycle” 1 2 5 Tolerance k- SMC 1 Boiko, et al. TAC 2004 PRD with ( k +1)-SMC Limits Performance 2 Boiko, et al. TAC 2005 . + Margins . 3 Hernandez, CEP 2013 Performance Requirement Margins . Boiko, JFI 2013 4 5 Shtessel, et al. CDC 96 A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 4 / 22
Problem Statement Control System A1. Plant has unknown relative degree r . A2. W ( j ω ) of the linear plant may be obtained. A3. Linear plant has low pass filter properties A4. Amplitude and phase frequency characteristics of W ( j ω ) are monotonously decreasing functions, i.e. | W ( j ω 1 ) | > | W ( j ω 2 ) | and arg W ( j ω 1 ) > arg W ( j ω 2 ) for ω 1 < ω 2 A5. Describing Function of SMC may be obtained and it depends only on the amplitude A A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 5 / 22
Problem Statement Effects of Unmodeled Dynamics Presence of unmodeled dynamics in the system increase the relative degree. The output y will not converge to zero but to a limit cycle [Shtessel, et al. 96],[Boiko, et al. 05] HB equation gives a solution and limit cycles in systems controlled by SMC may be predicted. Tolerance Limits The frequency ω c and amplitude A c are the tolerance limits of the acceptable limit cycle of the output y , so that self-sustained oscillations of the output y with the amplitudes A ≤ A c and the frequencies ω ≥ ω c yield the acceptable performance of the closed loop system in the real sliding mode [Utkin 09] A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 6 / 22
Problem Statement Motivation Example Suppose system has r > 2 and it is controlled by SMC and 2-SMC Case 3. Which controller is to be selected for the implementation? Case \ Controller SMC 2-SMC Case 1 A > A c and/or ω < ω c A > A c and/or ω < ω c Case 2 A > A c and/or ω < ω c A ≤ A c , ω ≥ ω c Case 3 A ≤ A c , ω ≥ ω c A ≤ A c , ω ≥ ω c A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 7 / 22
Outline Introduction 1 Problem Statement Practical Relative Degree 2 Performance Margins 3 Definition of Performance Margins Performance margins for conventional SMC Performance margins for 2-SM (Twisting Algorithm) Practical Relative Degree with Performance Margins Requirement 4 Conclusions 5 A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 8 / 22
Practical Relative Degree Practical Relative Degree Practical Relative Degree (PRD) is understood as the smallest order r of SMC, that yields a predicted limit cycle in the closed-loop system with the amplitude A ≤ A c , A c > 0 and the frequency ω ≥ ω c , 0 < ω c < ∞ . A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 9 / 22
Outline Introduction 1 Problem Statement Practical Relative Degree 2 Performance Margins 3 Definition of Performance Margins Performance margins for conventional SMC Performance margins for 2-SM (Twisting Algorithm) Practical Relative Degree with Performance Margins Requirement 4 Conclusions 5 A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 10 / 22
Definition of Performance Margins Performance Phase Margin The Performance Phase Margin (PPM) in the system is the maximal additional phase shift in W ( j ω ) that the closed loop system can tolerate for its output y to exhibit the acceptable limit cycle with A ≤ A c , A c > 0 and ω ≥ ω c , 0 < ω c < ∞ in the real sliding mode. Performance Gain Margin The Performance Gain Margin (PGM) in the system is the maximum additional gain in W ( j ω ) that the closed loop system can tolerate for its output y to exhibit the acceptable limit cycle with A ≤ A c , A c > 0 and/or ω ≥ ω c 0 < ω c < ∞ in the real sliding mode. A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 11 / 22
Performance margins for conventional SMC DF conventional SMC Let the controller be u = − α sign( y ) (1) DF is N ( A ) = 4 α/π A , where A es the amplitude of y . Harmonic Balance equation is Re { W ( j ω ) } + j Im { W ( j ω ) } = − π A (2) 4 α where ω is the frequency of the output of system r = 1 Im r = 2 r = 3 2 A 1 A 2 A 1 Re - 1 . N(A) W 1 (j ) W 2 (j ) W 3 (j ) A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 12 / 22
Performance Phase Margin Conventional SMC Performance Phase Margin Method PPM SMC 1. Locate maximum amplitude A c and the minimum frequency ω c in − 1 / N ( A ) and W ( j ω ), respectively. 3. Plot a circle with radio A c . 3(a) If the frequency ω c is located outside of the circle, the PPM should be obtained as the angle formed between the intersection of the circle with W ( j ω ) and the negative real axis. 3(b) If the frequency ω c is located inside of the circle, the PPM should be obtained as the angle formed between the vector associated to ω c and the negative real axis. A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 13 / 22
Performance Gain Margin Conventional SMC Performance Gain Margin SMC PGM SMC Consider the gain K > 1 in the harmonic balance equation K 1 W(j ) Im K 2 W(j ) 1 K · W ( j ω ) = − K 3 W(j ) N ( A ) K 3 >K 2 > K 1 A Solve the harmonic balance equation Re ! " for K with A c and ω c known, A ! - 1 . N(A) − π A K Re ( W ( j ω )) = 4 α K Im ( W ( j ω )) = 0 Value of K ≥ 1 which satisfy HB equation system with r ≤ 2 is K → ∞ PGM → ∞ . A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 14 / 22
Performance Gain Margin Relay System PGM Relay System PGM Relay System 1. Consider the gain K > 0 in the Im harmonic balance equation 1 K · W ( j ω ) = − PGM A N ( A ) A c - 1 . A Re 2. Solve the harmonic balance N(A) equation for K with A c and ω c known, 1 1 K = − N ( A c ) W ( j ω c ) 3. The value of K is the PGM of the system for the acceptable amplitude A c . A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 15 / 22
Performance margins for 2-SM DF for Twisting Algorithm Let the controller be u = − c 1 sign ( y ) − c 2 sign (˙ y ) (3) where c 1 > c 2 > 0 . DF is N ( A ) = (4 /π A )( c 1 + jc 2 ) , where A is the amplitude of the output y Harmonic Balance equation is W ( j ω ) = − A π c 1 − jc 2 (4) 4 c 2 1 + c 2 2 where ω is the frequency of the output y . A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 16 / 22
Performance Margins for 2-SM K 1 W(j ) a) b) K 2 W(j ) A A Im Im K 3 W(j ) A c - 1 . - 1 . K 3 >K 2 > K 1 N(A) N(A) Re Re PPM PPM c c W (j ) Figure: For Twisting Algorithm. a)PPM, b)PGM A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 17 / 22
Outline Introduction 1 Problem Statement Practical Relative Degree 2 Performance Margins 3 Definition of Performance Margins Performance margins for conventional SMC Performance margins for 2-SM (Twisting Algorithm) Practical Relative Degree with Performance Margins Requirement 4 Conclusions 5 A. Rosales, L. Fridman, Y. Shtessel (UNAM) Practical Relative Degree in SMC systems July 18 / 22
Recommend

![Project: Embedded SMC What is Secure Computa1on [SMC] A B](https://c.sambuz.com/1044183/project-embedded-smc-what-is-secure-computa1on-smc-s.webp)



More recommend
Explore More Topics
Stay informed with curated content and fresh updates.