Partial Orders for Reconstructing Open . . . Representing - PowerPoint PPT Presentation
Partial Orders are . . . Uncertainty is . . . First Result: Possible . . . Uncertainty- . . . Partial Orders for Reconstructing Open . . . Representing Uncertainty, Extending Allens . . . When Special- . . . Causality, and Decision
Partial Orders are . . . Uncertainty is . . . First Result: Possible . . . Uncertainty- . . . Partial Orders for Reconstructing Open . . . Representing Uncertainty, Extending Allen’s . . . When Special- . . . Causality, and Decision Describing All Possible . . . Combining Orders: . . . Making: General Properties, Home Page Operations, and Algorithms Title Page ◭◭ ◮◮ Francisco Zapata ◭ ◮ Department of Computer Science University of Texas at El Paso Page 1 of 62 500 W. University El Paso, TX 79968, USA Go Back fazg74@gmail.com Full Screen Close Quit
Partial Orders are . . . Uncertainty is . . . 1. Partial Orders are Important First Result: Possible . . . • One of the main objectives of science and engineering Uncertainty- . . . is to select the most beneficial decisions. For that: Reconstructing Open . . . Extending Allen’s . . . – we must know people’s preferences, When Special- . . . – we must have the information about different events Describing All Possible . . . (possible consequences of different decisions), and Combining Orders: . . . – since information is never absolutely accurate, we Home Page must have information about uncertainty. Title Page • All these types of information naturally lead to partial ◭◭ ◮◮ orders: ◭ ◮ – For preferences, a � b means that b is preferable to a . This relation is used in decision theory. Page 2 of 62 – For events, a � b means that a can influence b . This Go Back causality relation is used in space-time physics. Full Screen – For uncertain statements, a � b means that a is Close less certain than b (fuzzy logic etc.). Quit
Partial Orders are . . . Uncertainty is . . . 2. Overview First Result: Possible . . . • In each of the three areas, there is a lot of research Uncertainty- . . . about studying the corresponding partial orders. Reconstructing Open . . . Extending Allen’s . . . • This research has revealed that some ideas are common When Special- . . . in all three applications of partial orders. Describing All Possible . . . • In our research, we analyze: Combining Orders: . . . Home Page – general properties, operations, and algorithms – related to partial orders for representing uncertainty, Title Page causality, and decision making. ◭◭ ◮◮ • In our analysis, we will be most interested in uncer- ◭ ◮ tainty – the computer-science aspect of partial orders. Page 3 of 62 • In our presentation: Go Back – we first give a general outline, Full Screen – then present the main algorithmic result in detail. Close Quit
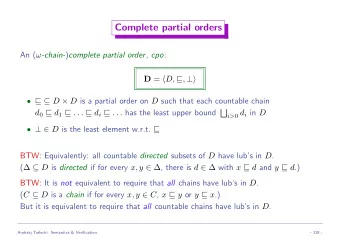
Partial Orders are . . . Uncertainty is . . . 3. Brief Outline First Result: Possible . . . • Introduction: partial orders are important Uncertainty- . . . Reconstructing Open . . . • Uncertainty is ubiquitous in applications of partial or- Extending Allen’s . . . ders When Special- . . . • Original order relation and the uncertainty-motivated Describing All Possible . . . experimentally confirmable relation Combining Orders: . . . Home Page • From potentially confirmable relation to actually con- firmable one: extending Allen’s interval algebra Title Page • Properties of ordered spaces: when is the resulting or- ◭◭ ◮◮ dered space a lattice ◭ ◮ • How to combine ordered sets Page 4 of 62 • How to tell when a product of two partially ordered Go Back spaces has a certain property Full Screen Close Quit
Partial Orders are . . . Uncertainty is . . . 4. Uncertainty is Ubiquitous in Applications of First Result: Possible . . . Partial Orders Uncertainty- . . . • Uncertainty is explicitly mentioned only in the computer- Reconstructing Open . . . science example of partial orders. Extending Allen’s . . . When Special- . . . • However, uncertainty is ubiquitous in describing our Describing All Possible . . . knowledge about all three types of partial orders. Combining Orders: . . . • For example, we may want to check what is happening Home Page exactly 1 second after a certain reaction. Title Page • However, in practice, we cannot measure time exactly. ◭◭ ◮◮ • So, we can only observe an event which is close to b – ◭ ◮ e.g., that occurs 1 ± 0 . 001 sec after the reaction. Page 5 of 62 • In general, we can only guarantee that the observed event is within a certain neighborhood U b of the event b . Go Back Full Screen • In decision making, we similarly know the user’s pref- erences only with some accuracy. Close Quit
Partial Orders are . . . Uncertainty is . . . 5. First Result: Possible and Necessary Orders First Result: Possible . . . • Due to uncertainty, there is usually a whole class C of Uncertainty- . . . different ordering relations consistent with data. Reconstructing Open . . . Extending Allen’s . . . • It is desirable to check when it is possible that a � b , When Special- . . . i.e., when a r b for some r from a given class C of orders. Describing All Possible . . . • It is desirable to check when it is necessary that a � b , Combining Orders: . . . i.e., when a r b for all r from a given class of orders. Home Page • A relation a R b is called a possible order if for some Title Page class C of orders, a R b ⇔ ∃ r ∈ C ( a r b ). ◭◭ ◮◮ • A relation a R b is called a necessary order if for some ◭ ◮ class C of orders, a R b ⇔ ∀ r ∈ C ( a r b ). Page 6 of 62 • Theorem. R is a possible order ⇔ R is reflexive. Go Back • Theorem. R is a necessary order ⇔ R is an order. Full Screen Close Quit
Partial Orders are . . . Uncertainty is . . . 6. Uncertainty-Motivated Experimentally First Result: Possible . . . Confirmable Relation Uncertainty- . . . • Because of the uncertainty: Reconstructing Open . . . Extending Allen’s . . . – the only possibility to experimentally confirm that When Special- . . . a precedes b (e.g., that a can causally influence b ) Describing All Possible . . . – is when for some neighborhood U b of the event b , we have a � � b for all � Combining Orders: . . . b ∈ U b . Home Page • In topological terms, this “experimentally confirmable” Title Page relation a ≺ b means that: ◭◭ ◮◮ – the element b is contained in the future cone C + a = { c : a � c } of the event a ◭ ◮ – together with some neighborhood. Page 7 of 62 • In other words, b belongs to the interior K + a of the Go Back closed cone C + a . Full Screen • Such relation, in which future cones are open, are called Close open . Quit
Partial Orders are . . . Uncertainty is . . . 7. Uncertainty-Motivated Experimentally First Result: Possible . . . Confirmable Relation (cont-d) Uncertainty- . . . • In usual space-time models: Reconstructing Open . . . Extending Allen’s . . . – once we know the open cone K + a , When Special- . . . – we can reconstruct the original cone C + a as the clo- Describing All Possible . . . sure of K + a : C + a = K + a . Combining Orders: . . . • A natural question is: vice versa, Home Page – can we uniquely reconstruct an open order Title Page – if we know the corresponding closed order? ◭◭ ◮◮ • In Chapter 3, we prove that this reconstruction is pos- ◭ ◮ sible. Page 8 of 62 • This result provides a partial solution to a known open Go Back problem. Full Screen Close Quit
Partial Orders are . . . Uncertainty is . . . 8. Reconstructing Open Order from the Closed First Result: Possible . . . Order Uncertainty- . . . • A set X with a partial order ≺ is called a kinematic Reconstructing Open . . . space if is satisfies the following conditions: Extending Allen’s . . . When Special- . . . ∀ a ∃ a − , a + ( a − ≺ a ≺ a + ); ∀ a, b ( a ≺ b → ∃ c ( a ≺ c ≺ b )); Describing All Possible . . . ∀ a, b, c ( a ≺ b, c → ∃ d ( a ≺ d ≺ b, c )); Combining Orders: . . . Home Page ∀ a, b, c ( b, c ≺ a → ∃ d ( b, c ≺ d ≺ a )) . Title Page • A kinematic space is called separable if there exists a ◭◭ ◮◮ countable set { x n } such that ◭ ◮ ∀ a, b ( a ≺ b ⇒ ∃ i ( a ≺ x i ≺ b )) . Page 9 of 62 • For every separable kinematic space, we define conver- Go Back gence s n → a as follows: Full Screen ∀ a − , a + ( a − ≺ a ≺ a + ⇒ ∃ N ∀ n ( n ≥ N ⇒ a − ≺ s n ≺ a + ))) . Close Quit
Partial Orders are . . . Uncertainty is . . . 9. Reconstructing Open Order from the Closed First Result: Possible . . . Order (cont-d) Uncertainty- . . . • For each set S , its closure S is defined as the set of all Reconstructing Open . . . the points a for which s n → a for some { s n } ⊆ S . Extending Allen’s . . . When Special- . . . • A kinematic space is called normal if Describing All Possible . . . b ∈ { c : a ≺ c } ⇔ a ∈ { c : c ≺ b } . Combining Orders: . . . Home Page • This relation is called closed order and denoted by Title Page a � b. ◭◭ ◮◮ • We say that a separable kinematic space is complete if ◭ ◮ every � -decreasing bounded sequence has a limit. Page 10 of 62 • Theorem. If � = � ′ for two complete separable normal Go Back kinematic orders ≺ and ≺ ′ , then ≺ = ≺ ′ . Full Screen Close Quit
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.