On the Improvement of the Phased Array Weather Radar Data - - PowerPoint PPT Presentation
On the Improvement of the Phased Array Weather Radar Data - Advantage and Disadvantage - Tomoo Ushio, H. Kikuchi, T. Mega (Tokyo Metropolitan University, Osaka University) S. Satoh, T. Iguchi (NICT), F. Mizutani, M. Wada (Toshiba) Phased Array
On the Improvement of the Phased Array Weather Radar Data - Advantage and Disadvantage - Tomoo Ushio, H. Kikuchi, T. Mega (Tokyo Metropolitan University, Osaka University) S. Satoh, T. Iguchi (NICT), F. Mizutani, M. Wada (Toshiba)
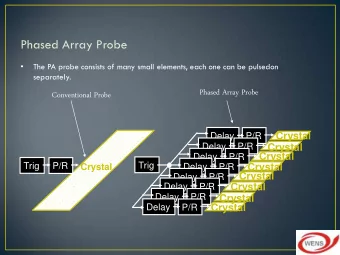
Phased Array RADAR in Osaka University, 2012 • Achieves high speed volume scan of 30 sec to detect severe storms instantaneously in urban area Scan system Elevation: Electronic scan Azimuth: Mechanical scan Coverage 3D scan (100 elevations) / 10 sec (- 1 min) Parameters Z h , v h , σ vh (single-polarization)
Dual Polarimetric Phased Array Radar System in 2017 Toshiba NIED etc Terminal Internet data Warning Real time Transfer Users Antenna Control/Signal Processing Units (Patch Antenna with RF-CMOS) (MMSE algorithm) MP-PAWR Dome
Fast Scanning Strategy Parabolic Radar Phased Array Radar PARABOLIC TYPE PHASED ARRAY TYPE Pencil beam ・ Fan beam • →mechanically scanning both in → electrically scan in elevation elevation and azimuth Parabolic antenna goes around • in a certain elevation angle
Dual Polarimetric obs. by MP-PAWR Zdr Zh V φdp Kdp ρhv 気象学会 2018 年度秋季大会 C460 5
Vh Zh Zdr ρ hv
PPI(Pr) Clear Sky (2018/08/02 12:00) Rainy (2018/07/28 16:00) 7
PPI(Φdp) Clear Sky (2018/08/02 12:00) Rainy (2018/07/28 16:00) 8
Advantages and Disadvantages • Advantage – Fast scanning and dense observation – Early and accurate warning • Disadvantage – Ground clutter contamination – ghost precipitation in data assimilation – less accurate warning • How can we reduce this disadvantage?
Problem 2-way beam pattern is poor Receiving beam pattern Fan beam pattern for transmitting by uniform phase shift 2-way beam pattern -13.6 dB High side lobe level The received signal from precipitation is seriously contaminated by the relatively high received power from ground and strong precipitation echoes 10 near by through the side lobes of the 2 way beam pattern.
Masking Problem High side lobe level from the two way beam pattern Transmitting Broad Beam Strong Ground Clutter A beam forming technique using the MMSE (Minimum Mean Square Error) formulation has been proposed and tested. This approach can adaptively mitigate the masking interference that results from the standard digital beam forming method in the vicinity of ground clutter and strong precipitation area
Signal Processing in PAWR unknown known M associated complex amplitudes [ ] Range = r 0 = T Î ´ M 1 x x x ! x C - l 0 , l 1 , l M 1 , l N received complex amplitude [ ] T ´ = Î N 1 y y y ! y C - l 0 , l 1 , l M 1 , l Steering vector T é p p ù 2 2 - q - - q j d cos j ( M 1 ) d cos q = s ( ) 1 e l ! e l ê ú ë û λ : wave length, l : pulse number 12
Signal Processing in PAWR unknown known Range = r 0 M y = S x + v N [ ] ´ = q q q Î N M S s ( ) s ( ) ! s ( ) C 1 2 N ´ Î N 1 v C : Additive Gaussian noise vector 13
Signal Processing in PAWR = H ˆ x w y Beam forming m , l m l [ ] ´ = Î M 1 ˆ ˆ ˆ ˆ x x x ! x C - l 0 , l 1 , l M 1 , l Range = r 0 [ ] = - Î ´ N 1 w w w ! w C m 0 1 N 1 : Complex weighting vector Phased array beam forming is … – to calculate a weighting average of received signals in each element – to calculate an optimal weights 14
Fourier Method Fourier Beam Forming (FR) q d sin ( ) q q s n m = w m m m N d – Equivalent to a Fourier n transform of y vector Origin Amplitude Phase Shifter E n ( t ) S E sum ( t ) 15
Minimum Mean Square Error Formulation Weighting factor is calculated by minimizing the residuals, defined as the difference between the reference and the weighting average of the received signal é ù 2 = - H J E x w y ê ú ë û m m MMSE m Lower sidelobes x q : Reference signal m m y : Received signal 16
Minimum Mean Square Error Formulation Weighting factor is calculated by minimizing the residuals, defined as the difference between the reference and the weighting average of the received signal { ( ) } é ù 2 = - + l q - H H J E x w y Re w s ( ) 1 ê ú ë û m m MMSE MMSE m m m Lower sidelobes Preserve power in main lobe x q : Reference signal ( λ : Lagrange Multiplier) m m y : Received signal 17
Minimum Mean Square Error Formulation Weighting factor is calculated by minimizing the residuals, defined as the difference between the reference and the weighting average of the received signal { ( ) } é ù 2 = - + l q - H H J E x w y Re w s ( ) 1 ê ú ë û m m MMSE MMSE m m m minimize - q 1 R s ( ) = w m MMSE m - q q H 1 s ( ) R s ( ) m m = + H R SR S R x v R : Covariance of x x R : Covariance of noise v 18
Minimum Mean Square Error Formulation Weighting factor is calculated by minimizing the residuals, defined as the difference between the reference and the weighting average of the received signal { ( ) } é ù 2 = - + l q - H H J E x w y Re w s ( ) 1 ê ú ë û m m MMSE MMSE m m m minimize - q 1 R s ( ) = w m MMSE m - q q H 1 s ( ) R s ( ) m m unknown = + H R SR S R x v R : Covariance of x x R : Covariance of noise v 19
Minimum Mean Square Error Formulation Weighting factor is calculated by minimizing the residuals, defined as the difference between the reference and the weighting average of the received signal { ( ) } é ù 2 = - + l q - H H J E x w y Re w s ( ) 1 ê ú ë û m m MMSE MMSE m m m minimize - q 1 R s ( ) = w m MMSE m - q q H 1 s ( ) R s ( ) 1) Initial value m m = + H R SR S R = H ˆ x w y x v BF BF l R : Covariance of x l , m m x Beam former R : Covariance of noise v method 20
Minimum Mean Square Error Formulation Weighting factor is calculated by minimizing the residuals, defined as the difference between the reference and the weighting average of the received signal { ( ) } é ù 2 = - + l q - H H J E x w y Re w s ( ) 1 ê ú ë û m m MMSE MMSE m m m minimize - q 1 R s ( ) = w m MMSE m - q q H 1 s ( ) R s ( ) 1) Initial value m m = + H R SR S R = H ˆ x w y x v BF BF l R : Covariance of x l , m m x R : Covariance of noise v 2) Calculation of weighting vector - q ( i ) 1 R s ( ) = ( i ) w m MMSE - q q m H ( i ) 1 s ( ) R s ( ) m m 21
Minimum Mean Square Error Formulation Weighting factor is calculated by minimizing the residuals, defined as the difference between the reference and the weighting average of the received signal { ( ) } é ù 2 = - + l q - H H J E x w y Re w s ( ) 1 ê ú ë û m m MMSE MMSE m m m minimize - q 1 R s ( ) = w m MMSE m - q q H 1 s ( ) R s ( ) 1) Initial value m m = + H R SR S R = H ˆ x w y x v BF BF l R : Covariance of x l , m m x R : Covariance of noise v 2) Calculation of weighting vector 3) Weighting average - q ( i ) 1 R s ( ) = ( i ) w m H = ( i ) ( i ) ˆ x w y MMSE - q q m H ( i ) 1 s ( ) R s ( ) MMSE MMSE l m m m 22 22 l
MMSE Beam Forming Re-iterative super resolution (RISR) algorithm 1) Initialization (i=0) As a prior information, FR solution is calculated. ( ) º = q w w s m FR m m 0 [ ] = H = ˆ x w y , ˆ ˆ ˆ ˆ x x x ! x - m , l m l l 0 , l 1 , l M 1 , l 0 0 0 0 2) Determination of MMSE weights 2 - = q + q H 1 w E [ x ( ) ]( S R S R ) s ( ) m m x v m i i i 3) Gain control = g : gain control factor w g w , m m i i 4) Computation of MMSE solution and Re-iteration [ ] = H + = ˆ x w y , ˆ ˆ ˆ ˆ x x x ! x - m , l m l l 0 , l 1 , l M 1 , l + i 1 i 1 + i i 1 23
Numerical Calculations x : 60dB from 30[deg] wave source 0 x : 28dB from 25[deg] 1 DBF Results
MMSE-4 Simulation results MMSE-1 Capon (CP) With a strong clutter Fourier (FR) Truth Precipitation Clutter • MMSEs properly suppresses strong clutter • The iteration in MMSE improves the solution. 25
Application to real data FR:elv=3 ° FR:elv=0 ° FR:elv=5 ° FR method MMSE:elv=0 ° MMSE:elv=3 ° MMSE:elv=5 ° MMSE MMSE with correction MMSE with correction MMSE with correction elv=0 ° elv=3 ° elv=5 ° Corrected MMSE
Application to real data Clear Sky Rainy Condition FR method MMSE method Corrected MMSE
Clutter mitigation with MMSE technique in doppler domain 除去なし Filtered image (0 deg. ) Original image
Summary • PAWR has rapid scanning and dense observation capabilities. • It also has the advantage of observing without any ground clutters. • The only drawback would be a cost.
Kikuchi et al. IEEE TGRS, 2017
Flow –Transmission Fan beam is transmitted by feeding power into 24 elements (max) (with about 10 deg beam width) 31
Flow –Reception Scattered signals are received by all 128 antennas 128 data are stored by 128 ADCs
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.