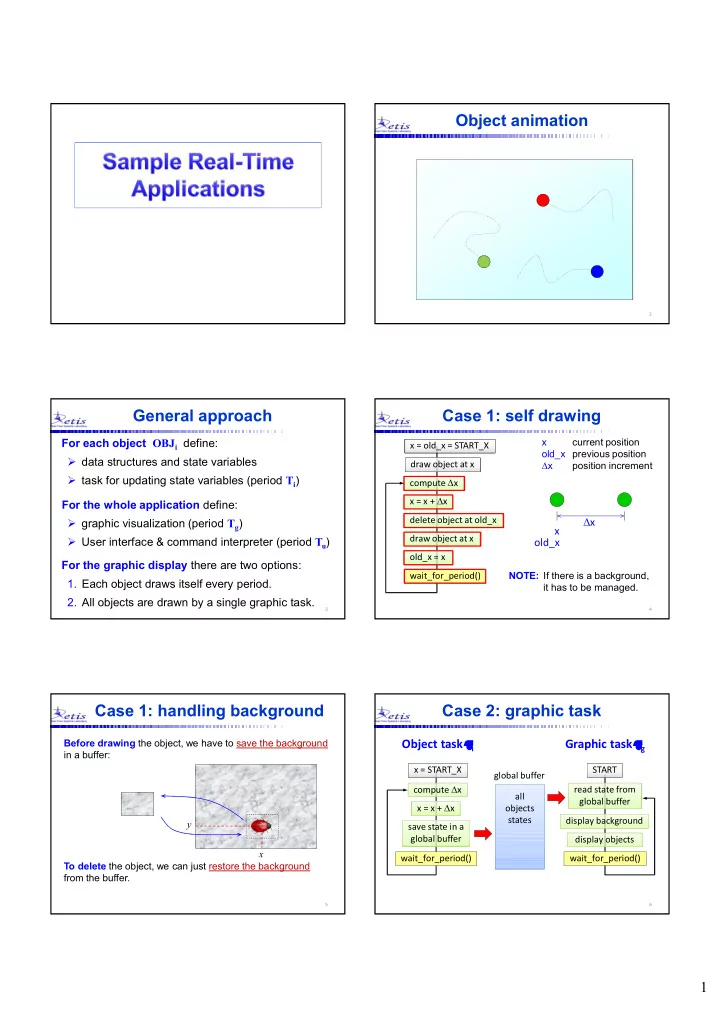
Object animation 2 General approach Case 1: self drawing For each object OBJ i define: x current position x = old_x = START_X old_x previous position data structures and state variables D x draw object at x position increment task for updating state variables (period T i ) compute D x D x = x + D x D For the whole application define: D x delete object at old_x graphic visualization (period T g ) x draw object at x User interface & command interpreter (period T u ) old_x old_x = x For the graphic display there are two options: NOTE: If there is a background, wait_for_period() 1. Each object draws itself every period. it has to be managed. 2. All objects are drawn by a single graphic task. 3 4 Case 1: handling background Case 2: graphic task Object task i Graphic task g Before drawing the object, we have to save the background in a buffer: x = START_X START global buffer compute D x read state from all global buffer x = x + D x objects states display background y save state in a global buffer display objects x wait_for_period() wait_for_period() To delete the object, we can just restore the background from the buffer. 5 6 1
Physical simulations Jumping balls Modeling Let us see how to write a program that simulates a number of jumping balls that move in a box following – Derive the system model expressing the position x as a the laws of physics: function of the other state variables. Speed must be independent of the period – compute: dx = vx * T; – For smooth motion, period should be no larger than 20 ms – If T is larger, you can multiply T by a timescale factor. Scalability – Express physical variables in MKS units using floats; – Convert to integer coordinates only for displaying; – use offset and scale factor for graphic coordinates: xg = offset + x * scale; 7 8 Things to define General description General description and requirements 1. Each ball is animated by a dedicated periodic task that updates its state every period. Application structure 2. The motion of each ball is independent on the other balls, Graphical layout but depends on its current state. User interface 3. Balls moves within a box and bounce on its borders. Motion rules 4. Balls lose some energy when bouncing on the floor. Constants of the simulation 5. The user can interact with the program and can State variables of the ball create new balls, make them jumping, vary gravity, etc. Global variables and data structures 6. The system provides information on: Auxiliary functions (divide them into categories) number of active balls, deadline misses, current gravity. 9 10 Application structure Application structure The task animating the ball must periodically update The state of multiple balls is stored in an array: the ball state from S ( t ) to S ( t+T ) : 1 state 1 graphic task graphic task S ( t+T ) ball i state var.: g state g task ( x, y, v x , v y ) array i state i S ( t ) Graphics Graphics parameters T i , D i g v 0 parameters T i , D i g v 0 fixed u u user user task 11 task 12 2
Graphical layout User interface Simulations should be done in real units (MKS) and We have to decide the inputs and the outputs: only later converted in pixels. Inputs Graphic window What variables can the user change? Menu area Pressing which keys? Virtual world Status Is the mouse used? (meters) Graphic world window (pixels) Outputs Which variables are displayed? 13 14 User interface Motion rules v y SPACE : creates a new ball with random parameters ESC : exits the program v x ( x , y ) A : makes balls jumping (provide extra energy) x new x curr v t v x = constant x 1 gt W : shows/hides the ball trail y new y curr v curr t 2 new curr v v gt y y y 2 LEFT / RIGHT : decrease/increase trail length These equations must be updated every period T i UP / DOWN : increase/decrease gravity A time scale can be used for the integration interval: Corresponding values must be shown on the state window dt = TSCALE * T i 15 16 Makefile #--------------------------------------------------- # Target file to be compiled by default #--------------------------------------------------- MAIN = balls #--------------------------------------------------- # CC will be the compiler to use #--------------------------------------------------- CC = gcc #--------------------------------------------------- # CFLAGS will be the options passed to the compiler #--------------------------------------------------- CFLAGS = -Wall -lpthread -lrt #--------------------------------------------------- # Dependencies #--------------------------------------------------- $(MAIN) : $(MAIN) .o ptask.o $(CC) $(CFLAGS) -o $(MAIN) $(MAIN) .o ptask.o `allegro-config --libs` $(MAIN) .o: $(MAIN) .c $(CC) -c $(MAIN) .c ptask.o: ptask.c $(CC) -c ptask.c 18 3
Header files Constants //----------------------------------------------------- //----------------------------------------------------- // BALLS: SIMULATION OF JUMPING BALLS // GRAPHICS CONSTANTS // with a single display task //----------------------------------------------------- //----------------------------------------------------- #define XWIN 640 // window x resolution #define YWIN 480 // window y resolution #include <stdlib.h> // include standard lib first #define BKG 0 // background color #include <stdio.h> #define MCOL 14 // menu color #include <math.h> #define NCOL 7 // numbers color #include <pthread.h> #define TCOL 15 // trail color #include <sched.h> //----------------------------------------------------- #include <allegro.h> #define LBOX 489 // X length of the ball box #include <time.h> #define HBOX 399 // Y height of the ball box #define XBOX 5 // left box X coordinate #include "ptask.h" // include own lib later #define YBOX 75 // upper box Y coordinate #include "mylib.h" #define RBOX 495 // right box X coordinate #define BBOX 475 // bottom box Y coordinate #define FLEV 5 // floor Y level (in world) 19 20 Constants State variables v y //----------------------------------------------------- // TASK CONSTANTS color //----------------------------------------------------- size v x #define PER 20 // task period in ms (x,y) #define DL 20 // relative deadline in ms #define PRI 80 // task priority struct status { // ball structure //----------------------------------------------------- int c; // color [1,15] // BALL CONSTANTS float r; // radius (m) //----------------------------------------------------- float x; // x coordinate (m) #define MAX_BALLS 20 // max number of balls float y; // y coordinate (m) #define G0 9.8 // acceleration of gravity float vx; // horizontal velocity (m/s) #define TLEN 30 // trail length float vy; // vertical velocity (m/s) #define HMIN 200 // min initial height float v0; // jumping velocity (m/s) #define HMAX 390 // max initial height }; #define VXMIN 20 // min initial hor. speed #define VXMAX 10 // max initial hor. speed struct status ball[MAX_BALLS] ; // balls status buffer #define DUMP 0.9 // dumping coefficient #define TSCALE 10 // time scale factor 21 22 Storing the trail Reading the trail It can be done using a It can be done using a circular buffer of length circular buffer of length L = max trail length: L = max trail length: top always points to top always points to x 1 x 2 x 3 x 4 x 5 x 6 x 1 x 2 x 3 x 4 x 5 x 6 the most recent data the most recent data top top next element: next element: cbuf cbuf (top + 1) % L (top + 1) % L x 1 x 2 x 3 x 4 x 5 x 6 x 2 x 3 x 4 x 5 previous element: previous element: 0 1 2 3 4 0 1 2 3 4 (top – 1 + L) % L (top – 1 + L) % L k th previous element: Getting the k th previous value : k th previous element: Store a new value x: (top – k + L) % L (top – k + L) % L top = (top + 1) % L; i = (top – k + L) % L; cbuf[top] = x; value = cbuf[i]; 23 24 4
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries