
SLIDE 1
Navigation Meshes and Real‐Time Dynamic Planning for Interactive Virtual Worlds
Marcelo Kallmann University of California Merced
mkallmann@ucmerced.edu
Mubbasir Kapadia Disney Research Zurich
mubbasir.kapadia@disneyresearch.com
Course Introduction
- Main Objectives
– Overview of the classical computational geometry and AI algorithms for path planning and navigation – Overview of recent advances in navigation meshes and real-time dynamic planning for interactive virtual worlds
Course Introduction
- Topics
1) Geometric Path Planning (Marcelo) (20min) 2) Discrete Search (Mubbasir) (20min) 3) Navigation Meshes (Marcelo) (20min) 4) Planning in Complex Domains (Mubbasir) (20min)
(Quick questions after each part, 10min at the end for questions)
Course Topics
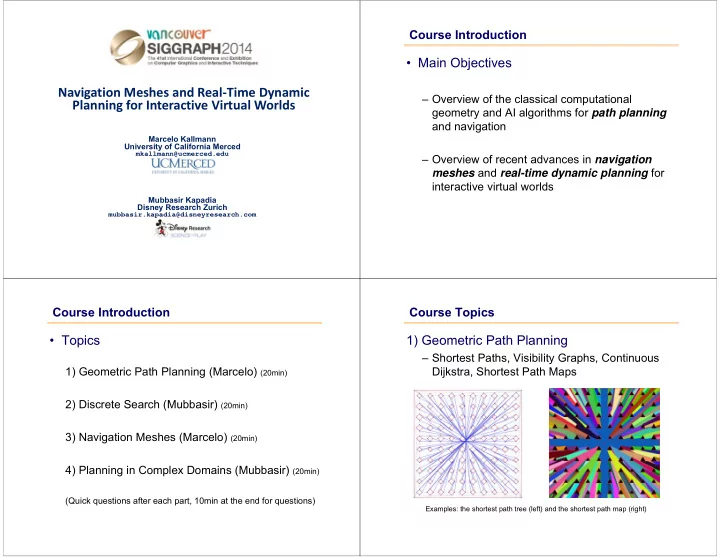
1) Geometric Path Planning
– Shortest Paths, Visibility Graphs, Continuous Dijkstra, Shortest Path Maps
Examples: the shortest path tree (left) and the shortest path map (right)