Low Level RF feedback loop design CSEM-EIC/EOn/Sep02 1 Main - PowerPoint PPT Presentation
Low Level RF feedback loop design CSEM-EIC/EOn/Sep02 1 Main variables the instantaneous phase deviation of the bunch from the synchronous phase. R the variations of the beam radius rf the RF frequency b the variations of the beam
Low Level RF feedback loop design CSEM-EIC/EOn/Sep02 1
Main variables ϕ the instantaneous phase deviation of the bunch from the synchronous phase. δ R the variations of the beam radius ω rf the RF frequency δω b the variations of the beam frequency ϕ b the phase of the beam with respect to the RF CSEM-EIC/EOn/Sep02 3
Transfer functions ϕ s = = B ( s ) B scaling factor, ϕ δω 2 + ω 2 s rf s ω s the synchronousfrequency. R b = = B ( s ) R δω 2 + ω 2 s rf s tt δω s = = synchronization system rb B ( s ) ω δω 2 + ω 2 s rf s Phase and radial system CSEM-EIC/EOn/Sep02 4
Phase and radial loop x 0 1 x 0 d 1 1 = + U − ω 2 dt x 0 x k s 0 2 2 � � � � � � B A s s ϕ 0 1 x 0 1 = = + y U R b 0 x 0 2 � � � � D C s s CSEM-EIC/EOn/Sep02 5
Discrete representation, pole placement Add an integral action A 0 sdiscr = F − C 1 sdiscr [ ] K K K ϕ R int Set of gains ( ) = − ϕ + − Feedback: U K K R K Z ϕ R int CSEM-EIC/EOn/Sep02 6
Pole placement Poles of a 3rd order Bessel filter Non overshooting behaviour 200 Hz (20 ms) CSEM-EIC/EOn/Sep02 7
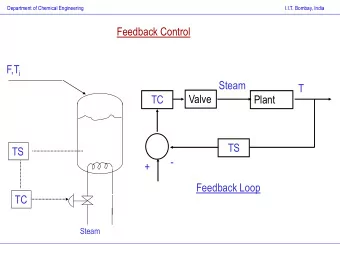
Feedback structure Cascaded implementation plus antiwindup CSEM-EIC/EOn/Sep02 8
Closed loop response 1 mm step -3 Phase and radial loop response Phase and radial loop response 1.2 x 10 12 150 100 10 1 mag, [dB] 50 8 Radius and its reference [m] 0.8 0 6 Phase [deg] -50 0 1 2 3 4 0.6 10 10 10 10 10 4 freq, [Hz] -50 0.4 2 -100 phase [deg] 0 -150 0.2 -200 -2 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 0 -250 time [s] 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 time [s] -300 0 1 2 3 4 10 10 10 10 10 freq, [Hz] CSEM-EIC/EOn/Sep02 9
Synchronization Beam rigidly phase with its reference ϕ b - ϕ ref = ϕ set Phase reference can be incremented at each clock cycle Output of the phase detector: sawtooth corresponding to the freq difference CSEM-EIC/EOn/Sep02 10
Synchronization Force the output of the phase detector to a ct value during acceleration using an offset (Moving reference) CSEM-EIC/EOn/Sep02 11
Synchronization Moving reference Error: diff between an extrapolated rf phase and the ref. Allows the closing of the synchron CSEM-EIC/EOn/Sep02 12
State space model 1 = ϕ = ω x 1 b b s ω 2 = ω = ω s x 2 b rf + ω 2 2 s s s = ϕ = ω x 3 rf + ω 2 2 s s CSEM-EIC/EOn/Sep02 13
Loop gains After going to discrete, set of gains: ( ) = − ϕ + ω + ϕ − ϕ − ϕ ∫ U K K K K ( ) ϕ ω ϕ b b int ref b b b Using pole placement CSEM-EIC/EOn/Sep02 14
Closed loop behaviour Synchronization loop response 1.4 150 100 1.2 mag, [dB] 50 Beam phase and its reference [rad] 1 0 -50 0.8 0 1 2 3 4 10 10 10 10 10 freq, [H z] 0.6 -50 -100 0.4 phase [deg] -150 -200 0.2 -250 0 -300 0 1 2 3 4 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 10 10 10 10 10 tim e [s] freq, [H z] CSEM-EIC/EOn/Sep02 15
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.