Localization in Sensor Networks Rahul Jain ETH Z urich May 5, - PowerPoint PPT Presentation
Introduction Countersniper System PinPtr Radio Interferometry Conclusions Localization in Sensor Networks Rahul Jain ETH Z urich May 5, 2010 Rahul Jain Localization in Sensor Networks Introduction Countersniper System Localization
Introduction Countersniper System PinPtr Radio Interferometry Conclusions Localization in Sensor Networks Rahul Jain ETH Z¨ urich May 5, 2010 Rahul Jain Localization in Sensor Networks
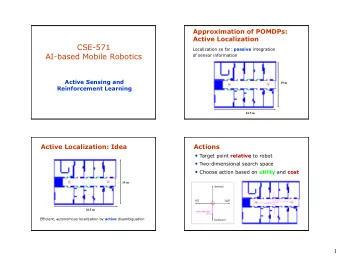
Introduction Countersniper System Localization PinPtr Motivation Radio Interferometry Conclusions Localization Active Localization System sends signals to localize target eg. Radar(non-cooperative), GPS(cooperative) Passive Localization System deduces location from observation of signals that are already present eg. Signals normally emitted by the target (eg. birdcalls) Rahul Jain Localization in Sensor Networks
Introduction Countersniper System Localization PinPtr Motivation Radio Interferometry Conclusions Motivation Many applications of WSN require the knowledge of where the individual nodes are located Motivating examples: Countersniper systems, Animal Tracking and Logistics We now look at an example of countersniper systems Rahul Jain Localization in Sensor Networks
Introduction Countersniper System Problem PinPtr Solution Radio Interferometry Acoustic Signals Conclusions Problem and Challenges To locate snipers in an urban environment Challenges of an urban terrain Multipath effects Poor coverage due to shading effect of buildings Limitations of existing systems Require direct line of sight Rely on muzzle flash that can be suppressed Centralized, thus not robust to sensor failure Cost effectiveness Rahul Jain Localization in Sensor Networks
Introduction Countersniper System Problem PinPtr Solution Radio Interferometry Acoustic Signals Conclusions Solution Use an ad-hoc wireless sensor network-based system Utilize many cheap sensors for good coverage of direct signal tolerance to failures Detect via acoustic signals like muzzle blasts and shockwaves Rahul Jain Localization in Sensor Networks
Introduction Countersniper System Problem PinPtr Solution Radio Interferometry Acoustic Signals Conclusions Acoustic Signals Shock wave front S v S Θ v B X A 1 v Θ = M = S sin v B Muzzle wave Figure 1: Acoustic events generated by a shot. The muzzle blast produces a spherical wave front, traveling at the speed of sound ( v S ) from the muzzle ( A ) to the sensor ( S ). The shock wave is generated in every point of the trajectory of the supersonic projectile producing a cone-shaped wave front, assuming the speed of the projectile is constant v B . The shockwave reaching sensor S was generated in point X . The angle of the shockwave cone is determined by the Mach number ( M ) of the projectile. Rahul Jain Localization in Sensor Networks
Overview Introduction System Architecture Countersniper System Middleware Services PinPtr Sensor Fusion Radio Interferometry Results Conclusions Remarks PinPtr Ad-hoc wireless network of inexpensive sensors Sensors can detect muzzle blasts and acoustic shockwaves measure their time of arrival (TOA) Message routing service delivers TOA to a base station User Interface through base stations or PDAs System field tested at the US Army McKenna MOUT (Military Operations in Urban Terrain) facility at Fort Nenning, GA Rahul Jain Localization in Sensor Networks
Overview Introduction System Architecture Countersniper System Middleware Services PinPtr Sensor Fusion Radio Interferometry Results Conclusions Remarks System Architecture Θ Θ = = Figure 2. System architecture Figure 2: System Architecture Rahul Jain Localization in Sensor Networks
Overview Introduction System Architecture Countersniper System Middleware Services PinPtr Sensor Fusion Radio Interferometry Results Conclusions Remarks Middleware Services Time Synchronization Flooding Time Synchronization Protocol All nodes synchronized with a root node Message Routing Gradient-based best effort converge-cast protocol All data routed to a root node Sensor Localization Estimate the sensor position using shots Current implementation places sensors by hand Rahul Jain Localization in Sensor Networks
Overview Introduction System Architecture Countersniper System Middleware Services PinPtr Sensor Fusion Radio Interferometry Results Conclusions Remarks Sensor Fusion Consistency Function C τ ( x , y , z , t ) = count ( | t i ( x , y , z , t ) − t i |≤ τ ) Search Algorithm General Bisection method Maximum 10 5 steps required Rahul Jain Localization in Sensor Networks
Overview Introduction System Architecture Countersniper System Middleware Services PinPtr Sensor Fusion Radio Interferometry Results Conclusions Remarks Setup 56 nodes 20 known shooter positions 171 shots Figure 3: PinPtr: Field Setup Rahul Jain Localization in Sensor Networks
Overview Introduction System Architecture Countersniper System Middleware Services PinPtr Sensor Fusion Radio Interferometry Results Conclusions Remarks Shooter Localization Errors 90 80 70 percentage of shots 60 50 2D error 3D error 40 30 20 10 0 1 2 3 4 5 localization error in meters Figure 4: Localization Errors in 2D and 3D Rahul Jain Localization in Sensor Networks
Overview Introduction System Architecture Countersniper System Middleware Services PinPtr Sensor Fusion Radio Interferometry Results Conclusions Remarks Error Sources 4 avgerage localization accuracy (meter) 3.5 3 2.5 2D error 2 3D error 1.5 1 0.5 0 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 timesynch error (millisec) Figure 5: Localization accuarcy vs. time synch error Rahul Jain Localization in Sensor Networks ≤
Overview Introduction System Architecture Countersniper System Middleware Services PinPtr Sensor Fusion Radio Interferometry Results Conclusions Remarks Sensor Density ≤ 120 9 8 100 7 Detection percentage 80 6 Accuracy (meter) 5 60 2D error 3D error 4 40 3 20 2 1 0 0 56 52 48 44 40 36 32 28 24 20 16 12 8 56 52 48 44 40 36 32 28 24 20 16 12 8 Number of motes used Number of motes used Figure 7: Localization accuarcy vs. number of sensor used Figure 6: Detection rate vs. number of sensors used Rahul Jain Localization in Sensor Networks ≤
Overview Introduction System Architecture Countersniper System Middleware Services PinPtr Sensor Fusion Radio Interferometry Results Conclusions Remarks Sensor Fusion Accuracy 30 20 Fusion algorithm 18 Fusion algorithm 25 Analytical solution Analytical solution 16 average localization error (m) 14 20 frequency (%) 12 15 10 8 10 6 4 5 2 0 0 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 3.2 3.4 0 5 10 15 20 25 30 35 40 45 50 localization error (m) ratio of bad measurements (% ) Figure 8: Error comparison with filtered readings Figure 9: Error comparison with unfiltered readings Rahul Jain Localization in Sensor Networks
Overview Introduction System Architecture Countersniper System Middleware Services PinPtr Sensor Fusion Radio Interferometry Results Conclusions Remarks Remarks Deployment of sensors in an urban environment is not trivial No power management Can not detect multiple shots Silencers? Rahul Jain Localization in Sensor Networks
Introduction Theory Countersniper System Implementation PinPtr Evaluation Radio Interferometry Remarks Conclusions Radio Interferometry Pair of nodes emitting radio waves simultaneously at slightly different frequencies Carrier frequency of the composite signal is between the two frequencies Neighbouring nodes can measure the energy of the envelope signal as the signal strength Rahul Jain Localization in Sensor Networks
π λ π Introduction Theory Countersniper System Implementation PinPtr Evaluation Radio Interferometry Remarks Conclusions Model B A � ✁ d BC d BD � ✁ d AD d AC � ✁ � ✁ � ✁ � ✁ D C � ✁ d − d + d − d phase offset = 2 AD BD BC AC ( mod 2 ) � ✁ carrier � ✁ � ✁ Figure 10: Radio Interferometric Ranging Technique Rahul Jain Localization in Sensor Networks
Introduction Theory Countersniper System Implementation PinPtr Evaluation Radio Interferometry Remarks Conclusions Filtered RSSI Signal Theorem 1: Let f 2 < f 1 be two close carrier frequencies with δ = ( f 1 − f 2 ) / 2 , δ << f 2 , and 2 δ < f cut . Furthermore, assume that a node receives the radio signal s ( t ) = a 1 cos (2 π f 1 t + ϕ 1 ) + a 2 cos (2 π f 2 t + ϕ 2 ) + n ( t ) , where n(t) is the Gaussian noise.Then the filtered RSSI signal r ( t ) is periodic with fundamental frequency f 1 − f 2 and absolute phase offset ϕ 1 − ϕ 2 . Rahul Jain Localization in Sensor Networks
Introduction Theory Countersniper System Implementation PinPtr Evaluation Radio Interferometry Remarks Conclusions Relative Phase Offset Theorem 2: Assume that the two nodes A and B transmit pure sine waves at two close frequncies f A > f B such that f A − f B < f cut , and two other nodes C and D measure the filtered RSSI signal. Then the relative phase offset of r C ( t ) and r D ( t ) is 2 π ( d AD − d AC + d BC − d BD ) ( mod 2 π ) c / f A c / f B Rahul Jain Localization in Sensor Networks
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.