LENSES INEL 6088 Computer Vision LENSES The function of the lens - PowerPoint PPT Presentation
LENSES INEL 6088 Computer Vision LENSES The function of the lens is to collect more light Image sensor size determines camera format Lens should be chosen so that all features to be measured are covered in the image sensor, plus 10%
LENSES INEL 6088 Computer Vision
LENSES • The function of the lens is to collect more light • Image sensor size determines camera format • Lens should be chosen so that all features to be measured are covered in the image sensor, plus 10% for extra margin • Features must be at least 3 pixels across • If there are more than 100 features use a second camera 2
• Magnification = W camera /W FOV • FOV: Field of view = object area that is imaged by the lens onto the image sensor • W FOV =width of the FOV • W camera = width of the camera sensor • Working distance = distance from lens to object • Thin-lens approximation: lens thickness is neglected • Pinhole camera: no lens; images through a small hole 3
PINHOLE CAMERAS � Pinhole cameras work in practice • Abstract camera model - box with a small hole 4
Pinhole too big - many directions are averaged, blurring the image Pinhole too small- diffraction effects blur the image Generally, pinhole cameras are dark , because a very small set of rays from a particular point hits the screen. 5
THE REASON FOR LENSES 6
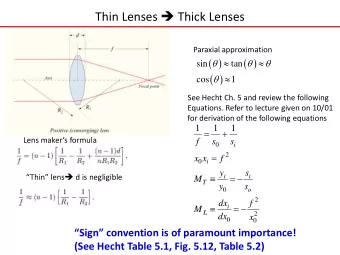
THE THIN Basic Properties: (1) Any ray entering the lens parallel to the axis goes through the focus on the other side; (2) any ray entering the lens from the LENS focus in one side emerges parallel to the axis on the other side Focal length: distance β α α between lens and β camera plane when the object is at infinity Magnification: Lens maker’s formula: m = z/z’ 7
(ignoring signs so -z ⇒ z and -y’ ⇒ y) z − f = P 0 P tan α = f P 0 tan β = P f = z 0 − f P 0 = z − f P f = f z 0 − f ( z − f )( z 0 − f ) = z 2 − z 0 f − zf + f 2 = f 2 zz 0 = z 0 f + zf f = 1 1 z + 1 z 0
SPHERICAL ABERRATION 9
LENS SYSTEMS 10
VIGNETTING 11
OTHER (POSSIBLY ANNOYING) PHENOMENA • Chromatic aberration � Light at different wavelengths follows different paths; hence, some wavelengths are defocussed � Machines: coat the lens � Humans: live with it • Scattering at the lens surface � Some light entering the lens system is reflected off each surface it encounters (Fresnel’s law gives details) � Machines: coat the lens, interior � Humans: live with it (various scattering phenomena are visible in the human eye) • Geometric phenomena (Barrel distortion, etc.) 12
Chromatic aberration
Light scattering (image flair)
Barrel distortion
RESOLUTION • Listed as resolving power in units of lines per inch/millimeter RP=1/2d lines/mm d = spacing between pixels in the image plane This equation neglects lens distortion – usually not an issue in M.V. 16
F/NUMBER • Cone angle of the rays that form an image • Determines • Brightness of image • Depth of field • Resolution of the lens • In MV the f/number can be taken as the ratio of the focal lens to the diameter of the aperture; large aperture -> small f/number 17
DEPTH OF FIELD • Larger aperture ↔ more light ↔ reduced depth of field • Depth of field: range of scene (object) distances with scene points that are in focus to an acceptable degree • Out of focus points are imaged to circles. If the diameter of the circle b is below the resolution of the sensor then defocusing is not significant 18
DEPTH OF FOCUS D b: maximum acceptable blur diameter d: lens’ diameter f: focal length z: scene distance (nominal plane of focus) Near plane distance Far plane distance 19
EXPOSURE E = Et • E : amount of light collected by the camera • E : image irradiance; intensity of light falling on the image plane • t : duration of exposure (shutter speed) 20
POLARIZATION • Some objects have certain features that are extremely bright, reflective or objects may be illuminated from an angle that produces intense reflection. • Polarize filters are a solution. 21
POLARIZATION • Normally light is linearly polarized: 22
POLARIZATION • A linear polarizer filter absorb E along some directions and transmit orthogonal to the direction of absorption. 23
POLARIZER AND TRANSMISSION AXIS (TA) 24
POLARIZERS 25
POLARIZERS 26
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.