
Image Formation Lecture 2 Motion in Robotics Evolution of the Eye - PowerPoint PPT Presentation
Image Formation Lecture 2 Motion in Robotics Evolution of the Eye Pin Hole Model + More than 50% of the human cortex involved in vision! What will we learn - Fundamentals of Image Formation Evolution of Biological Eye Projective
Image Formation Lecture 2
Motion in Robotics
Evolution of the Eye Pin Hole Model + More than 50% of the human cortex “involved” in vision!
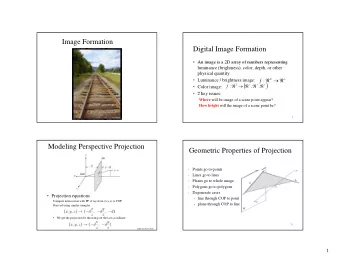
What will we learn - Fundamentals of Image Formation Evolution of Biological Eye ● Projective Geometry ● Pinhole Camera Model ○ Plumb-Bob Distortion Model ○ Camera Calibration ●
How do we see the world? slides credit to Prof. Savarese
Pinhole Camera slides credit to Prof. Savarese
First one to do it (that we know about…) slides credit to Prof. Savarese Leonardo da Vinci (1452-1519)
Pinhole Camera Model slides credit to Prof. Savarese
Pinhole Camera Model slides credit to Prof. Savarese
Pinhole Camera Model slides credit to Prof. Savarese
Digital Image v u j’ k’ slides credit to Prof. Savarese
Offset to Image Center k’ j’ u v Projective Transformation x c y c
Homogeneous Coordinates slides credit to Prof. Savarese
Projective Transformation with Homogeneous Coordinates slides credit to Prof. Savarese K
Exercise on Projective Geometry Given the intrinsic camera matrix project the point
Size of the Aperture
Camera Lenses slides credit to Prof. Savarese
Problem: Radial Distortion slides credit to Prof. Savarese
Problem: Tangential Distortion
Modeling Distortion: Plumb Bob Model Radial distance Distortion parameters
Intrinsic and Extrinsic Camera Parameters Intrinsic Camera Parameters: Extrinsic Camera Parameters:
Exercise on Projective Geometry Given the intrinsic camera matrix and the 3D point on an object positioned at Wrt. the camera, estimate the projection of the point into the camera.
Estimating Camera Parameters: Camera Calibration ● Move known pattern (size) in front of the camera and collect images ● Detect point-corners on the pattern ○ Set of images -> set of corresponding points ● Estimate: ○ Camera-to-pattern poses ○ Camera parameters that minimize the reprojection error
Calibration Procedure
Calibration Procedure
Calibration Procedure
Calibration Procedure
Questions?
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.