IBM Watson example https://www.youtube.com/watch?v=DywO4zksfXw - PowerPoint PPT Presentation
Knowledge Representation Knowledge Representation IBM Watson example https://www.youtube.com/watch?v=DywO4zksfXw VOLUME 56, NUMBER 3/4, MAY/JUL. 2012 Journal of Research and Development Including IBM Systems Journal Knowledge Representation
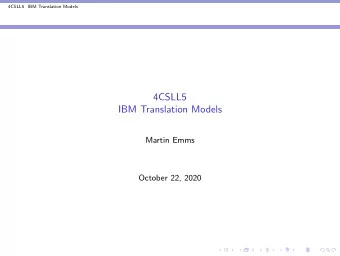
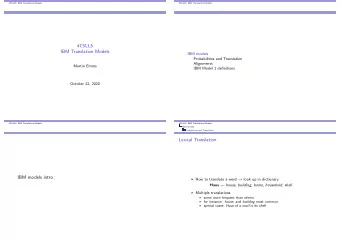
Knowledge Representation Knowledge Representation IBM Watson example https://www.youtube.com/watch?v=DywO4zksfXw VOLUME 56, NUMBER 3/4, MAY/JUL. 2012 Journal of Research and Development Including IBM Systems Journal Knowledge Representation A very brief intro Jacek Malec Dept. of Computer Science, Lund University February 8, 2017 This Is Watson Jacek Malec, Computer Science, Lund University 1(39) Jacek Malec, Computer Science, Lund University 2(39) Knowledge Representation Knowledge Representation Knowrob: Why is knowledge so important? Knowrob: Ontology (knowrob.owl) if the robot does not know about the task, the environment, or the robot, then the programmer has to hardcode everything programming/instructing at an abstract/semantic level put the bolt into the nut and fasten it pour water into the glass . . . Jacek Malec, Computer Science, Lund University 3(39) Jacek Malec, Computer Science, Lund University 4(39)
Knowledge Representation Knowledge Representation Knowrob: A task ontology Knowrob: A task ontology Jacek Malec, Computer Science, Lund University 5(39) Jacek Malec, Computer Science, Lund University 6(39) Knowledge Representation Knowledge Representation Knowrob: Knowledge types KnowRob Components Jacek Malec, Computer Science, Lund University 7(39) Jacek Malec, Computer Science, Lund University 8(39)
Knowledge Representation Knowledge Representation Knowrob: Procedural attachments Knowrob: Inferring storage location Compute symbolic knowledge on demand from data structures that already exist on the robot by attaching procedures to semantic classes and properties Re-use existing information and make sure abstract knowledge is grounded Jacek Malec, Computer Science, Lund University 9(39) Jacek Malec, Computer Science, Lund University 10(39) Knowledge Representation Knowledge Representation Knowrob: Summary Plan for today Knowledge-based systems 1 declarative knowledge: ontologies Tacit knowledge Inferred knowledge procedural attachment Domain-specific stuff logical inference Changing premises multi-modal representation Uncertainty Semantic anchoring Video (13 mins): Architectures 2 https://www.youtube.com/watch?v=4usoE981e7I Self-awareness 3 Jacek Malec, Computer Science, Lund University 11(39) Jacek Malec, Computer Science, Lund University 12(39)
Knowledge Representation Knowledge Representation Tacit knowledge Tacit knowledge Facts about: Facts about: objects Jacek Malec, Computer Science, Lund University 13(39) Jacek Malec, Computer Science, Lund University 13(39) Knowledge Representation Knowledge Representation Tacit knowledge Tacit knowledge Facts about: Facts about: objects objects places places times Jacek Malec, Computer Science, Lund University 13(39) Jacek Malec, Computer Science, Lund University 13(39)
Knowledge Representation Knowledge Representation Tacit knowledge Tacit knowledge Facts about: Facts about: objects objects places places times times events events processes processes behaviours behaviours vehicle dynamics rigid body interactions traffic laws . . . Jacek Malec, Computer Science, Lund University 13(39) Jacek Malec, Computer Science, Lund University 13(39) Knowledge Representation Knowledge Representation Tacit knowledge Tacit knowledge Background knowledge for all this includes: Background knowledge for all this includes: ontologies Jacek Malec, Computer Science, Lund University 14(39) Jacek Malec, Computer Science, Lund University 14(39)
Knowledge Representation Knowledge Representation Tacit knowledge Tacit knowledge Background knowledge for all this includes: Background knowledge for all this includes: ontologies ontologies theories theories physics mereology . . . Jacek Malec, Computer Science, Lund University 14(39) Jacek Malec, Computer Science, Lund University 14(39) Knowledge Representation Knowledge Representation Tacit knowledge Inferred knowledge Background knowledge for all this includes: ontologies (or: turning implicit into explicit) theories logics (language) 1 physics theorem proving (mechanics) 2 mereology modes of reasoning 3 . . . Not everything needs to be explicit, nor expressed in one monolithic formalism Jacek Malec, Computer Science, Lund University 14(39) Jacek Malec, Computer Science, Lund University 15(39)
Knowledge Representation Knowledge Representation Logics: modal Logics: modal take a logical language, let α be a wff take a logical language, let α be a wff 1 1 ⇤ α is a wff ⇤ α is a wff 2 2 ⌃ α is a wff ⌃ α is a wff 3 3 normally ⇤ α $ ¬ ⌃ ¬ α normally ⇤ α $ ¬ ⌃ ¬ α 4 4 Intended meaning? Intended meaning? ⇤ α means Necessarily α 1 Jacek Malec, Computer Science, Lund University 16(39) Jacek Malec, Computer Science, Lund University 16(39) Knowledge Representation Knowledge Representation Logics: modal Logics: modal take a logical language, let α be a wff take a logical language, let α be a wff 1 1 ⇤ α is a wff ⇤ α is a wff 2 2 ⌃ α is a wff ⌃ α is a wff 3 3 normally ⇤ α $ ¬ ⌃ ¬ α normally ⇤ α $ ¬ ⌃ ¬ α 4 4 Intended meaning? Intended meaning? ⇤ α means Necessarily α ⇤ α means Necessarily α 1 1 ⇤ α means Agent knows α ⇤ α means Agent knows α 2 2 ⇤ α means Agent believes α 3 Jacek Malec, Computer Science, Lund University 16(39) Jacek Malec, Computer Science, Lund University 16(39)
Knowledge Representation Knowledge Representation Logics: modal Logics: modal take a logical language, let α be a wff take a logical language, let α be a wff 1 1 ⇤ α is a wff ⇤ α is a wff 2 2 ⌃ α is a wff ⌃ α is a wff 3 3 normally ⇤ α $ ¬ ⌃ ¬ α normally ⇤ α $ ¬ ⌃ ¬ α 4 4 Intended meaning? Intended meaning? ⇤ α means Necessarily α ⇤ α means Necessarily α 1 1 ⇤ α means Agent knows α ⇤ α means Agent knows α 2 2 ⇤ α means Agent believes α ⇤ α means Agent believes α 3 3 ⇤ α means Always in the future α ⇤ α means Always in the future α 4 4 G α means Always in the future (or: Globally) α 5 Jacek Malec, Computer Science, Lund University 16(39) Jacek Malec, Computer Science, Lund University 16(39) Knowledge Representation Knowledge Representation Logics: Kripke semantics Logics: temporal Globally (always): 1 Actually, meaning of modal formulae is defined on graph structures ⇤ Φ Nodes: possible worlds Finally (eventually): 2 ⌃ Φ Edges: reachability relation Next: 3 � Φ ~p,q,~r p,q,~r ~p,q,r Until: 4 Ψ U Φ p,q,r p,q,~r ~p,~q,r p,q,r p,~q,r Jacek Malec, Computer Science, Lund University 17(39) Jacek Malec, Computer Science, Lund University 18(39)
Knowledge Representation Knowledge Representation Logics: temporal Logics: description Earlier known as semantic networks. Formal version of semantic Globally (always): 1 web languages (OIL, DAML, OWL). ⇤ Φ Finally (eventually): 2 ⌃ Φ Next: 3 � Φ Until: 4 Ψ U Φ Effective reasoning: inheritance via SubsetOf (SubClass) and MemberOf (isA) links Cf. Richard Murray’s verification of autonomous car controller: intersection paths special meaning of some links (e.g. cardinality constraints) ( Φ e init ^ ⇤ Φ e safe ^ ⇤⌃ Φ e prog ) ! ( Φ s init ^ ⇤ Φ s safe ^ ⇤⌃ Φ s prog ) classification, consistency, subsumption Jacek Malec, Computer Science, Lund University 18(39) Jacek Malec, Computer Science, Lund University 19(39) Knowledge Representation Knowledge Representation Representation: ontologies Modes of reasoning: Deduction RedLightAt ( intersection 1 ) 8 ( x ) RedLightAt ( x ) ! � StopBefore ( x ) thus � StopBefore ( intersection 1 ) General Pattern: prior facts 1 Lots of robot-related ontologies: domain knowledge 2 knowrob, IEEE CORA (Standard 1872-2015), intelligent systems observations 3 ontology (2005, NIST), ... Jacek Malec, Computer Science, Lund University 20(39) Jacek Malec, Computer Science, Lund University 21(39)
Knowledge Representation Knowledge Representation Modes of reasoning: Deduction Modes of reasoning: Deduction RedLightAt ( intersection 1 ) RedLightAt ( intersection 1 ) 8 ( x ) RedLightAt ( x ) ! � StopBefore ( x ) 8 ( x ) RedLightAt ( x ) ! � StopBefore ( x ) thus thus � StopBefore ( intersection 1 ) � StopBefore ( intersection 1 ) General Pattern: General Pattern: prior facts prior facts 1 1 domain knowledge domain knowledge 2 2 observations observations 3 3 conclusions conclusions 4 4 Sound. Sound. But note: Birds fly. Tweety is a penguin. Penguins are birds. Jacek Malec, Computer Science, Lund University 21(39) Jacek Malec, Computer Science, Lund University 21(39) Knowledge Representation Knowledge Representation Modes of reasoning: Induction Modes of reasoning: Abduction OnDesk ( monitor 1 ) ^ Monitor ( monitor 1 ) , General pattern: OnDesk ( monitor 2 ) ^ Monitor ( monitor 2 ) , prior facts 1 OnDesk ( monitor 3 ) ^ Monitor ( monitor 3 ) , domain knowledge 2 OnDesk ( monitor 4 ) ^ Monitor ( monitor 4 ) , OnDesk ( monitor 5 ) ^ Monitor ( monitor 5 ) observations 3 thus 8 ( x ) Monitor ( x ) ! OnDesk ( x ) General pattern: Observe 1 Generalize 2 Fallible. Constructs hypotheses, not true facts. However, most of our practical reasoning, in particular learning, is of this kind. Jacek Malec, Computer Science, Lund University 22(39) Jacek Malec, Computer Science, Lund University 23(39)
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.