HMM, MEMM and CRF Probabilistic Graphical Models Sharif University - PowerPoint PPT Presentation
HMM, MEMM and CRF Probabilistic Graphical Models Sharif University of Technology Spring 201 7 Soleymani Sequence labeling Taking collective a set of interrelated instances 1 , , and jointly labeling them We get as
HMM, MEMM and CRF Probabilistic Graphical Models Sharif University of Technology Spring 201 7 Soleymani
Sequence labeling Taking collective a set of interrelated instances 𝒚 1 , … , 𝒚 𝑈 and jointly labeling them We get as input a sequence of observations 𝒀 = 𝒚 1:𝑈 and need to label them with some joint label 𝒁 = 𝑧 1:𝑈 2
Generalization of mixture models for sequential data [Jordan] Y: states (latent variables) X: observations 𝑎 … 𝑍 𝑍 𝑍 𝑍 1 2 𝑈−1 𝑈 𝑌 𝑌 1 𝑌 2 𝑌 𝑈−1 𝑌 𝑈 3
HMM examples Some applications of HMM Speech recognition, NLP , activity recognition Part-of-speech-tagging 𝑊𝐶 𝑊𝐶𝑂 𝑈𝑝 𝑂𝑂𝑄 𝑊𝐶𝑎 to expected Students are study 4
HMM: probabilistic model Transitional probabilities : transition probabilities between states 𝐵 𝑗𝑘 ≡ 𝑄(𝑍 𝑢 = 𝑘|𝑍 𝑢−1 = 𝑗) Initial state distribution: start probabilities in different states 𝜌 𝑗 ≡ 𝑄(𝑍 1 = 𝑗) Observation model : Emission probabilities associated with each state 𝑄(𝑌 𝑢 |𝑍 𝑢 , 𝚾) 5
𝑍 : states (latent variables) HMM: probabilistic model 𝑌 : observations Transitional probabilities : transition probabilities between states 𝑄 𝑍 𝑢 𝑍 𝑢−1 = 𝑗 = 𝑁𝑣𝑚𝑢𝑗(𝑍 𝑢 |𝐵 𝑗1 , … , 𝐵 𝑗𝑁 ) ∀𝑗 ∈ 𝑡𝑢𝑏𝑢𝑓𝑡 Initial state distribution: start probabilities in different states 𝑄 𝑍 1 = 𝑁𝑣𝑚𝑢𝑗(𝑍 1 |𝜌 1 , … , 𝜌 𝑁 ) Observation model : Emission probabilities associated with each state Discrete observations: 𝑄 𝑌 𝑢 𝑍 𝑢 = 𝑗 = 𝑁𝑣𝑚𝑢𝑗(𝑌 𝑢 |𝐶 𝑗,1 , … , 𝐶 𝑗,𝐿 )∀𝑗 ∈ 𝑡𝑢𝑏𝑢𝑓𝑡 General: 𝑄 𝑌 𝑢 𝑍 𝑢 = 𝑗 = 𝑔(. |𝜾 𝑗 ) 6
Inference problems in sequential data Decoding : argmax 𝑄 𝑧 1 , … , 𝑧 𝑈 𝑦 1 , … , 𝑦 𝑈 𝑧 1 ,…,𝑧 𝑈 Evaluation Filtering : 𝑄 𝑧 𝑢 𝑦 1 , … , 𝑦 𝑢 Smoothing : 𝑢 ′ < 𝑢, 𝑄 𝑧 𝑢 ′ 𝑦 1 , … , 𝑦 𝑢 Prediction : 𝑢′ > 𝑢 , 𝑄 𝑧 𝑢 ′ 𝑦 1 , … , 𝑦 𝑢 7
Some questions Inference 𝑄 𝑧 𝑢 |𝑦 1 , … , 𝑦 𝑢 =? 𝑄 𝑦 1 , … , 𝑦 𝑈 =? 𝑄 𝑧 𝑢 |𝑦 1 , … , 𝑦 𝑈 =? Learning: How do we adjust the HMM parameters: Complete data : each training data includes a state sequence and the corresponding observation sequence Incomplete data : each training data includes only an observation sequence 8
Forward algorithm 𝑗, 𝑘 = 1, … , 𝑁 𝛽 𝑢 𝑗 = 𝑄 𝑦 1 , … , 𝑦 𝑢 , 𝑍 𝑢 = 𝑗 𝛽 𝑢 𝑗 = 𝛽 𝑢−1 𝑘 𝑄 𝑍 𝑢 = 𝑗|𝑍 𝑢−1 = 𝑘 𝑄 𝑦 𝑢 | 𝑍 𝑢 = 𝑗 𝑘 Initialization: 𝛽 1 𝑗 = 𝑄 𝑦 1 , 𝑍 1 = 𝑗 = 𝑄 𝑦 1 |𝑍 1 = 𝑗 𝑄 𝑍 1 = 𝑗 Iterations: 𝑢 = 2 to 𝑈 𝛽 𝑢 𝑗 = 𝑘 𝛽 𝑢−1 𝑘 𝑄 𝑍 𝑢 = 𝑗|𝑍 𝑢−1 = 𝑘 𝑄 𝑦 𝑢 |𝑍 𝑢 = 𝑗 … 𝑍 𝑍 𝑍 𝑍 1 2 𝑈−1 𝑈 𝛽 𝑢 𝑗 = 𝑛 𝑢−1→𝑢 (𝑗) 𝛽 1 (. ) 𝛽 𝑈−1 (. ) 𝛽 𝑈 (. ) 𝛽 2 (. ) 𝑌 1 𝑌 2 𝑌 𝑈−1 𝑌 𝑈 9
Backward algorithm 𝑗, 𝑘 ∈ 𝑡𝑢𝑏𝑢𝑓𝑡 𝛾 𝑢 𝑗 = 𝑛 𝑢→𝑢−1 (𝑗) = 𝑄 𝑦 𝑢+1 , … , 𝑦 𝑈 |𝑍 𝑢 = 𝑗 𝛾 𝑢−1 𝑗 = 𝛾 𝑢 𝑘 𝑄 𝑍 𝑢 = 𝑘|𝑍 𝑢−1 = 𝑗 𝑄 𝑦 𝑢 | 𝑍 𝑢 = 𝑗 𝑘 Initialization: 𝛾 𝑈 𝑗 = 1 Iterations: 𝑢 = 𝑈 down to 2 𝛾 𝑢−1 𝑗 = 𝑘 𝛾 𝑢 𝑘 𝑄 𝑍 𝑢 = 𝑘|𝑍 𝑢−1 = 𝑗 𝑄 𝑦 𝑢 | 𝑍 𝑢 = 𝑗 𝛾 1 . 𝛾 2 . 𝛾 𝑈−1 . 𝛾 𝑈 . = 1 … 𝑍 𝑍 𝑍 𝑍 𝛾 𝑢 𝑗 = 𝑛 𝑢→𝑢−1 (𝑗) 1 2 𝑈−1 𝑈 10 𝑌 1 𝑌 2 𝑌 𝑈−1 𝑌 𝑈
Forward-backward algorithm 𝛽 𝑢 (𝑗) ≡ 𝑄 𝑦 1 , 𝑦 2 , … , 𝑦 𝑢 , 𝑍 𝑢 = 𝑗 𝛾 𝑢 (𝑗) ≡ 𝑄 𝑦 𝑢+1 , 𝑦 𝑢+2 , … , 𝑦 𝑈 |𝑍 𝑢 = 𝑗 𝛽 𝑢 𝑗 = 𝛽 𝑢−1 𝑘 𝑄 𝑍 𝑢 = 𝑗|𝑍 𝑢−1 = 𝑘 𝑄 𝑦 𝑢 | 𝑍 𝑢 = 𝑗 𝑘 𝛽 1 𝑗 = 𝑄 𝑦 1 , 𝑍 1 = 𝑗 = 𝑄 𝑦 1 |𝑍 1 = 𝑗 𝑄 𝑍 1 = 𝑗 𝛾 𝑢−1 𝑗 = 𝛾 𝑢 𝑘 𝑄 𝑍 𝑢 = 𝑘|𝑍 𝑢−1 = 𝑗 𝑄 𝑦 𝑢 | 𝑍 𝑢 = 𝑗 𝑘 𝛾 𝑈 𝑗 = 1 𝑄 𝑦 1 , 𝑦 2 , … , 𝑦 𝑈 = 𝛽 𝑈 𝑗 𝛾 𝑈 𝑗 = 𝛽 𝑈 𝑗 𝑗 𝑗 𝑢 = 𝑗|𝑦 1 , 𝑦 2 , … , 𝑦 𝑈 = 𝛽 𝑢 (𝑗)𝛾 𝑢 (𝑗) 𝑄 𝑍 𝑗 𝛽 𝑈 𝑗 11
Forward-backward algorithm This will also be used in the E-step of the EM algorithm to train a HMM: 𝛾 1 . 𝛾 2 . 𝛾 𝑈−1 . 𝛾 𝑈 . = 1 … 𝑍 𝑍 𝑍 𝑍 1 2 𝑈−1 𝑈 𝛽 1 (. ) 𝛽 2 (. ) 𝛽 𝑈−1 (. ) 𝛽 𝑈 (. ) 𝑌 1 𝑌 2 𝑌 𝑈−1 𝑌 𝑈 𝑄 𝑦 1 ,…,𝑦 𝑈 ,𝑍 𝑢 =𝑗 𝛽 𝑢 (𝑗)𝛾 𝑢 (𝑗) 𝑄 𝑍 𝑢 = 𝑗 𝑦 1 , … , 𝑦 𝑈 = = 𝑂 𝑄 𝑦 1 ,…,𝑦 𝑈 𝑘=1 𝛽 𝑈 (𝑘) 12
Decoding Problem Choose state sequence to maximize the observations: argmax 𝑄 𝑧 1 , … , 𝑧 𝑢 𝑦 1 , … , 𝑦 𝑢 𝑧 1 ,…,𝑧 𝑢 Viterbi algorithm: Define auxiliary variable 𝜀 : 𝜀 𝑢 𝑗 = 𝑧 1 ,…,𝑧 𝑢−1 𝑄(𝑧 1 , 𝑧 2 , … , 𝑧 𝑢−1 , 𝑍 max 𝑢 = 𝑗, 𝑦 1 , 𝑦 2 , … , 𝑦 𝑢 ) 𝜀 𝑢 (𝑗) : probability of the most probable path ending in state 𝑍 𝑢 = 𝑗 Recursive relation : 𝜀 𝑢 𝑗 = max 𝜀 𝑢−1 𝑘 𝑄(𝑍 𝑢 = 𝑗|𝑍 𝑢−1 = 𝑘) 𝑄 𝑦 𝑢 𝑍 𝑢 = 𝑗 𝑘 𝜀 𝑢 𝑗 = 𝑘=1,…,𝑂 𝜀 𝑢−1 𝑘 𝑄 𝑍 max 𝑢 = 𝑗 𝑍 𝑢−1 = 𝑘 𝑄(𝑦 𝑢 |𝑍 𝑢 = 𝑗) 13
Decoding Problem: Viterbi algorithm Initialization 𝑗 = 1, … , 𝑁 𝜀 1 𝑗 = 𝑄 𝑦 1 |𝑍 1 = 𝑗 𝑄 𝑍 1 = 𝑗 𝜔 1 𝑗 = 0 Iterations: 𝑢 = 2, … , 𝑈 𝑗 = 1, … , 𝑁 𝜀 𝑢 𝑗 = max 𝜀 𝑢−1 𝑘 𝑄 𝑍 𝑢 = 𝑗 𝑍 𝑢−1 = 𝑘 𝑄 𝑦 𝑢 𝑍 𝑢 = 𝑗 𝑘 𝜔 𝑢 𝑗 = argmax 𝜀 𝑢 𝑘 𝑄 𝑍 𝑢 = 𝑗 𝑍 𝑢−1 = 𝑘 𝑘 Final computation: 𝑄 ∗ = max 𝑘=1,…,𝑂 𝜀 𝑈 𝑘 ∗ = argmax 𝑧 𝑈 𝜀 𝑈 𝑘 𝑘=1,…,𝑂 Traceback state sequence: 𝑢 = 𝑈 − 1 down to 1 ∗ = 𝜔 𝑢+1 𝑧 𝑢+1 ∗ 𝑧 𝑢 14
Max-product algorithm 𝑛𝑏𝑦 𝑦 𝑗 = max 𝑛𝑏𝑦 (𝑦 𝑘 ) 𝑛 𝑘𝑗 𝜚 𝑦 𝑘 𝜚 𝑦 𝑗 , 𝑦 𝑘 𝑛 𝑙𝑘 𝑦 𝑘 𝑙∈𝒪(𝑘)\𝑗 𝑛𝑏𝑦 × 𝜚 𝑦 𝑗 𝜀 𝑢 𝑗 = 𝑛 𝑢−1,𝑢 15
HMM Learning Supervised learning : When we have a set of data samples, each of them containing a pair of sequences (one is the observation sequence and the other is the state sequence) Unsupervised learning : When we have a set of data samples, each of them containing a sequence of observations 16
HMM supervised learning by MLE 𝑩 𝝆 … 𝑍 𝑍 𝑍 𝑍 1 2 𝑈−1 𝑈 𝑪 𝑌 2 𝑌 𝑈−1 𝑌 𝑈 𝑌 1 Initial state probability: 𝜌 𝑗 = 𝑄 𝑍 1 = 𝑗 , 1 ≤ 𝑗 ≤ 𝑁 State transition probability: 𝐵 𝑘𝑗 = 𝑄 𝑍 𝑢+1 = 𝑗 𝑍 𝑢 = 𝑘 , 1 ≤ 𝑗, 𝑘 ≤ 𝑁 State transition probability: Discrete 𝐶 𝑗𝑙 = 𝑄 𝑌 𝑢 = 𝑙 𝑍 𝑢 = 𝑗 , 1 ≤ 𝑙 ≤ 𝐿 observations 17
HMM: supervised parameter learning by MLE 𝑂 𝑈 𝑈 (𝑜) 𝝆 (𝑜) |𝑧 𝑢−1 (𝑜) , 𝑩) (𝑜) |𝑧 𝑢 (𝑜) , 𝑪) 𝑄 |𝜾 = 𝑄 𝑧 𝑄(𝑧 𝑢 𝑄(𝒚 𝑢 1 𝑢=2 𝑢=1 𝑜=1 (𝑜) = 𝑗, 𝑧 𝑢 (𝑜) = 𝑘 𝑂 𝑈 𝑜=1 𝑢=2 𝐽 𝑧 𝑢−1 𝐵 𝑗𝑘 = (𝑜) = 𝑗 𝑂 𝑈 𝑜=1 𝑢=2 𝐽 𝑧 𝑢−1 (𝑜) = 𝑗 𝑂 𝑜=1 𝐽 𝑧 1 𝜌 𝑗 = 𝑂 (𝑜) = 𝑗, 𝑦 𝑢 (𝑜) = 𝑙 𝑂 𝑈 𝑜=1 𝑢=1 𝐽 𝑧 𝑢 Discrete 𝐶 𝑗𝑙 = observations (𝑜) = 𝑗 𝑂 𝑈 𝑜=1 𝑢=1 𝐽 𝑧 𝑢 18
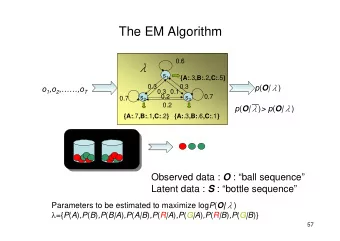
Learning Problem: how to construct an HHM given only observations? Find 𝜾 = (𝑩, 𝑪, 𝝆) , maximizing 𝑄(𝒚 1 , … , 𝒚 𝑈 |𝜾) Incomplete data EM algorithm 19
Recommend


![A Talk on Protein Homology Detection by HMM-HMM comparisons[1] Sding, J Qing Ye Department of](https://c.sambuz.com/139484/a-talk-on-protein-homology-detection-by-hmm-hmm-s.webp)

More recommend
Explore More Topics
Stay informed with curated content and fresh updates.