Formulating the Alternating Current Optimal Power Flow problem Leo - PowerPoint PPT Presentation
Formulating the Alternating Current Optimal Power Flow problem Leo Liberti, CNRS LIX Ecole Polytechnique liberti@lix.polytechnique.fr 191026 1 / 48 Outline Real formulations Introduction Arc formulation Complex Formulations Parallel lines
Formulating the Alternating Current Optimal Power Flow problem Leo Liberti, CNRS LIX Ecole Polytechnique liberti@lix.polytechnique.fr 191026 1 / 48
Outline Real formulations Introduction Arc formulation Complex Formulations Parallel lines Natural formulation Software Edge formulation MatPower Arc formulation AMPL 2 / 48
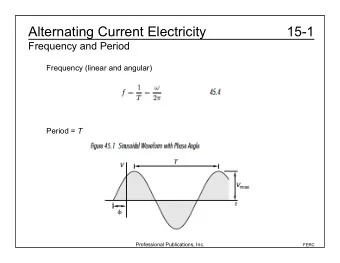
The quantities ◮ charge (basic measure) ◮ current I = charge per surface unit per second ◮ electric field = force vector at point acting on unit charge ◮ voltage V = potential energy of unit charge in electric field ◮ power S = voltage × current (in units of measure) [Bienstock 2016, p. 2] 3 / 48
Optimal Power Flow ◮ Decide power flows on electrical cables to minimize costs ◮ Alternating Current: generated by magnetic field induced by a 50-60 Hz mechanical rotation ◮ Current traverses grid 50 to 60 times per second consider average over time ◮ ACOPF: static approximation of a dynamic problem approximation yields modelling/numerical difficulties Example 1: lines directed for flow injection but undirected for admittance Example 2: voltage V , current I , power S are complex quantities ◮ Different approximations by different stakeholders ⇒ ambiguities, lack of accepted formal definitions 4 / 48
Notation ◮ Complex number: x = x r + ix c ∈ C most ACOPF literature uses j instead of i , reserved for current ◮ Complex conjugate: conj ( x ) = x r − ix c x conj ( x ) = ( x r ) 2 + ( x c ) 2 = | x | 2 ◮ Polar representation: αe iϑ = α cos ϑ + iα sin ϑ ( x r ) 2 + ( x c ) 2 � x r = α cos ϑ α = x c arccos( x r /α ) = arcsin( x c /α ) , = α sin ϑ ϑ = α called “magnitude”, ϑ “angle”/“phase” 5 / 48
On the word “flow” ◮ Power does not “flow” as does liquid or gas in a pipe electrons do not move much in cables: think more in terms of wave propagation ◮ For a line { b, a } , think of voltage difference between b and a as “influencing” the injection of power at b or a 6 / 48
The π -model of a line { b, a } r ba ix ba � � S ba S ba N ba i b ba i b ba V b V a 2 2 ground � Y bb � r ba + ix ba + i b ba 1 1 � 2 ) /τ 2 ( − � Y ba ba ( r ba + ix ba ) τe − iθba Y ba = = 1 r ba + ix ba + i b ba 1 Y ab Y aa − ( r ba + ix ba ) τ ba e iθba 2 ◮ V b , V a : voltage differences with ground ◮ � � S ba : power injected on { b, a } at b (vice versa for S ba ) ◮ Y used in Ohm’s law: current = Y ( V b , V a ) ⊤ ◮ r ba + ix ba : series impedance of the line { b, a } ◮ b ba : charging susceptange of the line { b, a } ◮ N ba = τ ba e iθ ba : tap ratio of transformer at b on line { b, a } 7 / 48
Outline Real formulations Introduction Arc formulation Complex Formulations Parallel lines Natural formulation Software Edge formulation MatPower Arc formulation AMPL 8 / 48
Subsection 1 Natural formulation 9 / 48
Sets ◮ B : set of buses (nodes) of the power grid ◮ L : set of lines (links) in the power grid edge { b, a } will index entity E as E ba ◮ G : set of generators set G b of generators at bus b , � b G b = G 10 / 48
Decision variables ◮ Voltage V b ∈ C at bus b ∈ B I ba ) ∈ C 2 on line { b, a } ∈ L ◮ Current I ba = ( � � I ba , S ba ) ∈ C 2 on line { b, a } ∈ L ◮ Power S ba = ( � � S ba , ◮ Power S bg ∈ C for a generator g ∈ G b at bus b ∈ B 11 / 48
Parameters ◮ Voltage magnitude in [ V b , V b ] ∈ IR at each bus b ∈ B ◮ Phase difference in [ ω ba , ω ba ] ⊆ [ − π, π ] at each line { b, a } ∈ L ◮ A reference bus r ∈ B s.t. V c b = 0 and V r b ≥ 0 ◮ Power demand ˜ S b ∈ C at bus b ∈ B there can be buses with negative demand ◮ Magnitude of power injected on a line { b, a } ∈ L bounded above by ¯ S ba = ¯ S ab ∈ R ◮ Power generated by g ∈ G b installed at bus b ∈ B in [ S bg , S bg ] ∈ IC ◮ Admittance matrix Y ba ∈ C 2 × 2 for a line { b, a } ∈ L ◮ Shunt admittance A b ∈ C at bus b ∈ B 12 / 48
Bounds ◮ Bounds on power | S ba | ≤ ¯ ∀{ b, a } ∈ L S ba 1 ⊤ where | S ba | = ( | � � S ba | , | S ba | ) ◮ Bounds on generated power (enforced on real/imaginary parts) ∀ b ∈ B, g ∈ G b S bg ≤ S bg ≤ S bg ◮ Bounds on voltage magnitude ∀ b ∈ B V b ≤ | V b | ≤ V b ◮ Reference bus V c r = 0 ∧ V r r ≥ 0 13 / 48
Phase difference bounds ◮ Constraints: ∀{ b, a } ∈ L ω ba ≤ θ b − θ a ≤ ω ba ( ⋆ ) ◮ Issue: we don’t use phase variables θ and cartesian → polar mapping is nonlinear ◮ Prop. tan( ω ba ) ≤ ( V b conj ( V a )) c ( V b conj ( V a )) r ≤ tan( ω ba ) ∧ ( V b conj ( V a )) r ≥ 0 � � ( ⋆ ) ≡ cos( θ b − θ a ) = | V b | | V a | sin( θ b − θ a ) sin( θ b − θ a ) Pf. tan( θ b − θ a ) = | V b | | V a | cos( θ b − θ a ) | V b | sin θ b | V a | cos θ a − | V b | cos θ b | V a | sin θ a = | V b | cos θ b | V a | cos θ a + | V b | sin θ b | V a | sin θ a V c b V r a − V r b V c = ( V b conj ( V a )) c a = V r b V r a + V c b V c ( V b conj ( V a )) r a and tan is monotonically increasing 14 / 48
Constraints ◮ Power flow equations S b = − conj ( A b ) | V b | 2 + � S ba + ˜ � � ∀ b ∈ B S g { b,a }∈ L g ∈ G b ◮ Power in terms of voltage and current ∀{ b, a } ∈ L S ba = V ba ⊙ conj ( I ba ) ⊤ where ⊙ ≡ entrywise prod. and conj ( I ) ba = ( conj ( � � I ba ) , conj ( I ba )) ◮ Ohm’s law ∀{ b, a } ∈ L I ba = Y ba V ba where V ba = ( V b , V a ) ⊤ for { b, a } ∈ L 15 / 48
Constraints ◮ Power flow equations S b = − conj ( A b ) | V b | 2 + � S ba + ˜ � � ∀ b ∈ B S g g ∈ G b { b,a }∈ L ◮ Power in terms of voltage and current � V b conj ( � ∀{ b, a } ∈ L S ba = I ba ) � � ∀{ b, a } ∈ L S ba = V a conj ( I ba ) ◮ Ohm’s law � ∀{ b, a } ∈ L I ba = Y bb V b + Y ba V a � ∀{ b, a } ∈ L I ba = Y ab V b + Y aa V a 16 / 48
Objective function ◮ Depends on application setting ◮ Often: cost of generated power r + c 0 min S H Q S + ( c H S ) r ◮ Q hermitian ⇒ S H Q S ∈ R 17 / 48
Subsection 2 Edge formulation 18 / 48
Differences ◮ A line is an edge ℓ = { b, a } ◮ Entities with a direction are indexed with b or a � E b E ba ≡ ℓ � E a E ba ≡ ℓ ◮ This formulation is used by MatPower 19 / 48
Sets, parameters, variables ◮ ∀ b ∈ B let δ ( b ) = { ℓ ∈ L | ℓ = { b, a }} set of lines adjacent to b ◮ Upper bound ¯ S ℓ to power magnitude ◮ Bounds [ ω ℓ , ω ℓ ] to phase difference ℓ ) ∈ C 2 on line ℓ = { b, a } ∈ L ◮ Current I ℓ = ( I b ℓ , I a ℓ ) ∈ C 2 on line ℓ = { b, a } ∈ L ◮ Power S ℓ = ( S b ℓ , S a 20 / 48
Constraints ◮ Power flow equations S b = − conj ( A b ) | V b | 2 + � ℓ + ˜ � S b ∀ b ∈ B S g ℓ ∈ δ ( b ) g ∈ G b ◮ Power in terms of voltage and current S b V b conj ( I b ∀ ℓ ∈ L = ℓ ) ℓ S a V a conj ( I a ∀ ℓ ∈ L = ℓ ) ℓ ◮ Ohm’s law I b ∀ ℓ ∈ L = Y bb V b + Y ba V a ℓ I a ∀ ℓ ∈ L = Y ab V b + Y aa V a ℓ 21 / 48
Subsection 3 Arc formulation 22 / 48
Differences ◮ A line is a pair of anti-parallel arcs { ( b, a ) , ( a, b ) } ◮ Entities with a direction are indexed by ( b, a ) or ( a, b ) � E ba ≡ E b ≡ E ba { b,a } � E ba ≡ E a ≡ E ab { b,a } ◮ This formulation is easier to code in AMPL 23 / 48
Sets, parameters, variables ◮ set L ′ = { ( b, a ) , ( a, b ) | { b, a } ∈ L } of all arcs ◮ set L 0 ⊂ L ′ of arcs given in data s.t. ∀{ b, a } ∈ L ( b, a ) ∈ L 0 xor ( a, b ) ∈ L 0 ◮ Upper bounds ¯ S ba = ¯ S ab to power magnitude ◮ Bounds [ ω ba = ω ab , ω ba = ω ab ] to phase difference ◮ If ( b, a ) ∈ L 0 has a transformer, it is on the side of b ∈ B ◮ Current I ba ∈ C for each ( b, a ) ∈ L ′ injected at b ∈ B ◮ Power S ba ∈ C on each ( b, a ) ∈ L ′ injected at b ∈ B 24 / 48
Constraints ◮ Power flow equations S b = − conj ( A b ) | V b | 2 + � S ba + ˜ � ∀ b ∈ B S g g ∈ G b ( b,a ) ∈ L ′ ◮ Power in terms of current ∀ ( b, a ) ∈ L ′ S ba = V b conj ( I ba ) ◮ Ohm’s law ∀ ( b, a ) ∈ L 0 I ba = Y bb V b + Y ba V a ∀ ( b, a ) ∈ L 0 I ab = Y ab V b + Y aa V a ◮ Upper bounds on power magnitude ¯ ∀ ( b, a ) ∈ L ′ | S ba | ≤ S ba 25 / 48
Outline Real formulations Introduction Arc formulation Complex Formulations Parallel lines Natural formulation Software Edge formulation MatPower Arc formulation AMPL 26 / 48
Ohm’s law matrix Diagonal components of Y ba ∈ C 2 × 2 /τ 2 = 2( r − ix ) + i b ( r 2 + x 2 ) � r + ix + i b 1 � Y bb = 2 2( r + ix )( r − ix ) τ 2 ( r 2 + x 2 ) τ 2 + i b ( r 2 + x 2 ) − 2 x r = 2( r 2 + x 2 ) τ 2 2 = 2( r − ix ) + i b ( r 2 + x 2 ) 1 r + ix + i b Y aa = 2( r + ix )( r − ix ) r 2 + x 2 + i b ( r 2 + x 2 ) − 2 x r = 2( r 2 + x 2 ) 27 / 48
Recommend



More recommend
Explore More Topics
Stay informed with curated content and fresh updates.