Extreme functions with an arbitrary number of slopes Amitabh Basu - PowerPoint PPT Presentation
Extreme functions with an arbitrary number of slopes Amitabh Basu Michele Conforti Marco Di Summa Joseph Paat Johns Hopkins University Dipartimento di Matematica, Universita degli Studi di Padova, Italy. Aussois 2016
Extreme functions with an arbitrary number of slopes Amitabh Basu ∗ Michele Conforti † Marco Di Summa † Joseph Paat ∗ ∗ Johns Hopkins University † Dipartimento di Matematica, Universit‘a degli Studi di Padova, Italy. Aussois 2016 J.Paat JHU
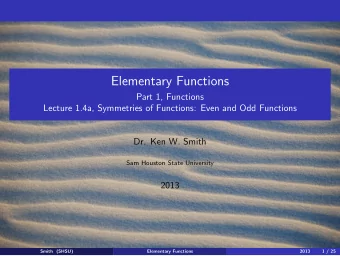
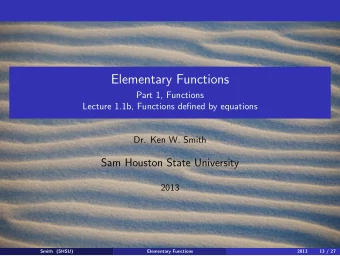
1 0.8 0.6 0.4 0.2 0.2 0.4 0.6 0.8 1 The Problem Let b ∈ (0 , 1) , k ∈ N with k ≥ 2 . Find π : [0 , 1] → R + so that (i) π (0) = π (1) = 0 , (ii) (Subadditivity) π ( r 1 + r 2 ) ≤ π ( r 1 ) + π ( r 2 ) , for all r 1 , r 2 ∈ [0 , 1] , (iii) (Symmetry) π ( r ) + π ( b − r ) = 1 , for all r ∈ [0 , 1] , (iv) (Extreme) If π 1 , π 2 satisfy (i)-(iii) and π = π 1 + π 2 then π = π 1 = π 2 . 2 (v) (k-slopes) Piecewise linear, continuous and has k different slopes. J.Paat JHU
The Problem Let b ∈ (0 , 1) , k ∈ N with k ≥ 2 . Find π : [0 , 1] → R + so that (i) π (0) = π (1) = 0 , (ii) (Subadditivity) π ( r 1 + r 2 ) ≤ π ( r 1 ) + π ( r 2 ) , for all r 1 , r 2 ∈ [0 , 1] , (iii) (Symmetry) π ( r ) + π ( b − r ) = 1 , for all r ∈ [0 , 1] , (iv) (Extreme) If π 1 , π 2 satisfy (i)-(iii) and π = π 1 + π 2 then π = π 1 = π 2 . 2 (v) (k-slopes) Piecewise linear, continuous and has k different slopes. 1 Ex. k = 2 , b = 1 / 2 0.8 0.6 Why do we care? 0.4 0.2 0.2 0.4 0.6 0.8 1 J.Paat JHU
The Problem Let b ∈ (0 , 1) , k ∈ N with k ≥ 2 . Find π : [0 , 1] → R + so that (i) π (0) = π (1) = 0 , (ii) (Subadditivity) π ( r 1 + r 2 ) ≤ π ( r 1 ) + π ( r 2 ) , for all r 1 , r 2 ∈ [0 , 1] , (iii) (Symmetry) π ( r ) + π ( b − r ) = 1 , for all r ∈ [0 , 1] , (iv) (Extreme) If π 1 , π 2 satisfy (i)-(iii) and π = π 1 + π 2 then π = π 1 = π 2 . 2 (v) (k-slopes) Piecewise linear, continuous and has k different slopes. 1 Ex. k = 2 , b = 1 / 2 0.8 0.6 Why do we care? 0.4 0.2 0.2 0.4 0.6 0.8 1 J.Paat JHU
Let’s start by relaxing an integer linear program— Let A ∈ R n × m . Consider the feasible region Let A B be a basis from col( A ) Ax = b A B x B + A N x N = b x ∈ Z m x ≥ 0, x B ∈ Z n , x N ∈ Z m − n x ≥ 0, − A − 1 B A N x N = x B − A − 1 − A − 1 B A N x N = x B − A − 1 B b B b x B , x N ≥ 0, x N ≥ 0, x B ∈ Z n , x N ∈ Z m − n x B ∈ Z n , x N ∈ Z m − n � � · The convex hull of Step 4 is B A N x ∈ Z n − A − 1 x ∈ Z m − n : − A − 1 B A N x N ∈ Z n − A − 1 − A − 1 B b B b + Gomory’s corner polyhedron x N ≥ 0, b b �∈ Z n (i.e. x N = 0) then we · If A − 1 x N ∈ Z m − n want to separate it from the solutions J.Paat JHU
Let’s start by relaxing an integer linear program— Let A ∈ R n × m . Consider the feasible region Let A B be a basis from col( A ) Ax = b A B x B + A N x N = b x ∈ Z m x ≥ 0, x B ∈ Z n , x N ∈ Z m − n x ≥ 0, − A − 1 B A N x N = x B − A − 1 − A − 1 B A N x N = x B − A − 1 B b B b x B , x N ≥ 0, x N ≥ 0, x B ∈ Z n , x N ∈ Z m − n x B ∈ Z n , x N ∈ Z m − n � � · The convex hull of Step 4 is B A N x ∈ Z n − A − 1 x ∈ Z m − n : − A − 1 B A N x N ∈ Z n − A − 1 − A − 1 B b B b + Gomory’s corner polyhedron x N ≥ 0, b b �∈ Z n (i.e. x N = 0) then we · If A − 1 x N ∈ Z m − n want to separate it from the solutions J.Paat JHU
Let’s start by relaxing an integer linear program— Let A ∈ R n × m . Consider the feasible region Let A B be a basis from col( A ) Ax = b A B x B + A N x N = b x ∈ Z m x ≥ 0, x B ∈ Z n , x N ∈ Z m − n x ≥ 0, Rearrange − A − 1 B A N x N = x B − A − 1 − A − 1 B A N x N = x B − A − 1 B b B b x B , x N ≥ 0, x N ≥ 0, x B ∈ Z n , x N ∈ Z m − n x B ∈ Z n , x N ∈ Z m − n � � · The convex hull of Step 4 is B A N x ∈ Z n − A − 1 x ∈ Z m − n : − A − 1 B A N x N ∈ Z n − A − 1 − A − 1 B b B b + Gomory’s corner polyhedron x N ≥ 0, b b �∈ Z n (i.e. x N = 0) then we · If A − 1 x N ∈ Z m − n want to separate it from the solutions J.Paat JHU
Let’s start by relaxing an integer linear program— Let A ∈ R n × m . Consider the feasible region Let A B be a basis from col( A ) Ax = b A B x B + A N x N = b x ∈ Z m x ≥ 0, x B ∈ Z n , x N ∈ Z m − n x ≥ 0, Rearrange Drop nonnegativity − A − 1 B A N x N = x B − A − 1 − A − 1 B A N x N = x B − A − 1 B b B b on x B x B , x N ≥ 0, x N ≥ 0, x B ∈ Z n , x N ∈ Z m − n x B ∈ Z n , x N ∈ Z m − n � � · The convex hull of Step 4 is B A N x ∈ Z n − A − 1 x ∈ Z m − n : − A − 1 B A N x N ∈ Z n − A − 1 − A − 1 B b B b + Gomory’s corner polyhedron x N ≥ 0, b b �∈ Z n (i.e. x N = 0) then we · If A − 1 x N ∈ Z m − n want to separate it from the solutions J.Paat JHU
Let’s start by relaxing an integer linear program— Let A ∈ R n × m . Consider the feasible region Let A B be a basis from col( A ) Ax = b A B x B + A N x N = b x ∈ Z m x ≥ 0, x B ∈ Z n , x N ∈ Z m − n x ≥ 0, Rearrange Drop nonnegativity − A − 1 B A N x N = x B − A − 1 − A − 1 B A N x N = x B − A − 1 B b B b on x B x B , x N ≥ 0, x N ≥ 0, x B ∈ Z n , x N ∈ Z m − n x B ∈ Z n , x N ∈ Z m − n ∼ = � � · The convex hull of Step 4 is B A N x ∈ Z n − A − 1 x ∈ Z m − n : − A − 1 B A N x N ∈ Z n − A − 1 B A N x N ∈ Z n − A − 1 − A − 1 − A − 1 B b B b B b + Gomory’s corner polyhedron x N ≥ 0, x N ≥ 0, b b �∈ Z n (i.e. x N = 0) then we · If A − 1 x N ∈ Z m − n x N ∈ Z m − n want to separate it from the solutions J.Paat JHU
Let’s start by relaxing an integer linear program— Let A ∈ R n × m . Consider the feasible region Let A B be a basis from col( A ) Ax = b A B x B + A N x N = b x ∈ Z m x ≥ 0, x B ∈ Z n , x N ∈ Z m − n x ≥ 0, Rearrange Drop nonnegativity − A − 1 B A N x N = x B − A − 1 − A − 1 B A N x N = x B − A − 1 B b B b on x B x B , x N ≥ 0, x N ≥ 0, x B ∈ Z n , x N ∈ Z m − n x B ∈ Z n , x N ∈ Z m − n ∼ = · The convex hull of Step 4 is B A N x N ∈ Z n − A − 1 − A − 1 B b Gomory’s corner polyhedron x N ≥ 0, b b �∈ Z n (i.e. x N = 0) then we · If A − 1 x N ∈ Z m − n want to separate it from the solutions J.Paat JHU
So for R ∈ R n × k and b ∈ R n we have the feasible region � + : Rx ∈ Z n + b � x ∈ Z k . J.Paat JHU
So for R ∈ R n × k and b ∈ R n we have the feasible region � + : Rx ∈ Z n + b � x ∈ Z k . If R = ( r 1 , r 2 , . . . , r k ) then R n R= . . . r 1 r 2 . . . r k . . . x = . . . ← 0 [ x ( r 1 ) x ( r 2 ) . . . x ( r k )] 0 → . . . J.Paat JHU
So for R ∈ R n × k and b ∈ R n we have the feasible region � + : Rx ∈ Z n + b � x ∈ Z k . If R = ( r 1 , r 2 , . . . , r k ) then R n R= . . . r 1 r 2 . . . r k . . . x = . . . ← 0 [ x ( r 1 ) x ( r 2 ) . . . x ( r k )] 0 → . . . J.Paat JHU
So for R ∈ R n × k and b ∈ R n we have the feasible region � + : Rx ∈ Z n + b � x ∈ Z k . If R = ( r 1 , r 2 , . . . , r k ) then R n R= . . . r 1 r 2 . . . r k . . . x = . . . ← 0 [ x ( r 1 ) x ( r 2 ) . . . x ( r k )] 0 → . . . Gomory and Johnson introduced the n-row infinite group relaxation � � x : R n → Z + : rx r ∈ Z n + b , x has finite support � R b ( R n , Z n ) := r ∈ R n J.Paat JHU
Idea of a cut-generating function— Recall: For a fixed R , we want to separate x = 0 from + : Rx ∈ Z n + b �� x ∈ Z k �� conv . A valid inequality looks like k � γ i x i ≥ 1 , i =1 where γ i ≥ 0 for each i ∈ [ k ]. J.Paat JHU
Idea of a cut-generating function— Recall: For a fixed R , we want to separate x = 0 from + : Rx ∈ Z n + b �� x ∈ Z k �� conv . A valid inequality looks like k � γ i x i ≥ 1 , i =1 where γ i ≥ 0 for each i ∈ [ k ]. We can write γ i =: π ( r i ). J.Paat JHU
Idea of a cut-generating function— Recall: For a fixed R , we want to separate x = 0 from + : Rx ∈ Z n + b �� x ∈ Z k �� conv . A valid inequality looks like k � γ i x i ≥ 1 , i =1 where γ i ≥ 0 for each i ∈ [ k ]. We can write γ i =: π ( r i ). A cut-generating function π : R n → R + satisfies � π ( r i ) x i ≥ 1 , r ∈ R n for every x ∈ R b ( R n , Z n ). J.Paat JHU
Idea of a cut-generating function— Recall: For a fixed R , we want to separate x = 0 from + : Rx ∈ Z n + b �� x ∈ Z k �� conv . A valid inequality looks like k � γ i x i ≥ 1 , i =1 where γ i ≥ 0 for each i ∈ [ k ]. We can write γ i =: π ( r i ). A cut-generating function π : R n → R + satisfies � π ( r i ) x i ≥ 1 , r ∈ R n for every x ∈ R b ( R n , Z n ). Andersen, Averkov, Balas, Basu, Borozan, Campelo, Conforti, Cornu´ ejols, Daniilidis, Dash, Dey, Gomory, G¨ unl¨ uk, Hildebrand, Hong, Johnson, K¨ oppe, Letchford, Li, Lodi,Miller, Molinaro, Richard, Wolsey, Yıldız, Zambelli, Zhou... J.Paat JHU
A famous cut-generating function — For b ∈ (0 , 1), the Gomory function is 1 b r , 0 ≤ r < b 1 GMI b ( r ) = 1 − b (1 − r ) , b ≤ r < 1 π ( r − j ) , r ∈ [ j , j + 1) , j ∈ Z \ { 0 } . 1 0.8 0.6 0.4 0.2 0.2 0.4 0.6 0.8 1 GMI 1 / 2 J.Paat JHU
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.