Efficient dynamic closed-loop simulations of flexible manipulators - PowerPoint PPT Presentation
Efficient dynamic closed-loop simulations of flexible manipulators Linearised equations of motion (for e.g. closed-loop simulations) Superposition of rigid link motion and small elastic deformations Perturbation method
Efficient dynamic closed-loop simulations of flexible manipulators • Linearised equations of motion (for e.g. closed-loop simulations) • Superposition of rigid link motion and small elastic deformations • Perturbation method • Mode-Acceleration Method / Adaptive Modal Integration • Examples: One-link manipulator with constrained motion Spatial two-link flexible manipulator with PID control • Conclusions Ronald Aarts FMSA4CP-LP / 1
§ 12.6 or paper LP-1 Equations of motion Flexible manipulator with e m : large relative displacements and rotations, ε m : flexible deformation parameters. Equations of motion, adapted from slide DvM/93: � ¯ M ee ¯ M eε � � e m � � D e m F T �� � σ em � ¨ M (D 2 F · ( ˙ e m ε m )) · ( ˙ e m ε m ) − f � + , ˙ , ˙ = − M εe ¯ M εε ε m D ε m F T σ εm ¯ ¨ Components of the reduced mass matrix M ee = D e m F T M D e m F , M eε = D e m F T M D ε m F , ¯ ¯ M εe = D ε m F T M D e m F , M εε = D ε m F T M D ε m F . ¯ ¯ Ronald Aarts FMSA4CP-LP / 2
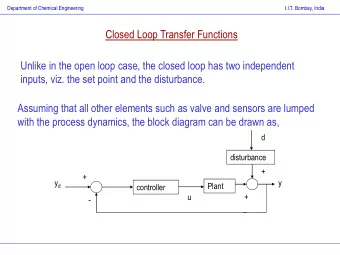
Equations of motion (2) e m � � q = With generalised coordinates (D.O.F .) ε m ¯ q + g ( q ) + ¯ M ( q )¨ q + C ( q, ˙ q ) ˙ Kq = Bu, M = D F T M D F M ( q ) is the reduced mass matrix ¯ ¯ • • C ( q, ˙ q ) ˙ q represents the Coriolis and centrifugal forces • g ( q ) is the vector of external nodal forces, including gravity, • σ em are the driving forces and torques, i.e. control input vector − u (note � � I the sign), and B = 0 • σ εm is the stress resultant vector of flexible elements, characterised by Hooke’s law: Symmetric stiffness matrix K εε with the elastic constants and � � 0 0 ¯ K = 0 K εε The direct solution of the non-linear equations of motion is rather time consuming (both low and high frequent behaviour). Ronald Aarts FMSA4CP-LP / 3
Perturbation method Model the vibrational motion of the manipulator as a first-order perturbation δq of the nominal rigid link motion q 0 e m e m δe m � � � � � � ; u = u 0 + δu 0 q = q 0 + δq or = + ε m δε m 0 The perturbation method involves two steps: 1. Compute nominal rigid link motion q 0 from the non-linear equations of motion with the rigidified model, i.e. all ε m ≡ 0 . M ee e m 0 + D e m F T � M 0 (D 2 F 0 · ( ˙ e m e m � = − σ em ¯ 0 ¨ 0 , 0)) · ( ˙ 0 , 0) − f = u 0 , 0 0 � M 0 (D 2 F 0 · ( ˙ � M εe e m 0 + D ε m F T e m e m = − σ εm ¯ 0 ¨ 0 , 0)) · ( ˙ 0 , 0) − f 0 . 0 For a known nominal trajectory e m e m e m 0 , ˙ 0 , ¨ 0 the generalised stress resultants σ em = − u 0 and σ εm are obtained. 0 0 Ronald Aarts FMSA4CP-LP / 4
2. Compute the (small) vibrational motion δq from linearised equations of motion: � � δu ¯ q + ¯ M 0 δ ¨ q + C 0 δ ˙ K 0 δq = . σ εm 0 σ εm are the generalised stress resultants applied as internal excitation forces. 0 ¯ M 0 is the system mass matrix, C 0 is the velocity sensitivity matrix, ¯ K 0 is the combined stiffness matrix defined as � � 0 0 ¯ K 0 = + G 0 + N 0 , 0 K εε 0 including the structural stiffness matrix K εε 0 , the geometric stiffening matrix G 0 and the dynamic stiffening matrix N 0 . Ronald Aarts FMSA4CP-LP / 5
Perturbation method: Applications e m e m � � � � � δe m � � − δσ em � δ ¨ δ ˙ 0 ¯ + ¯ + C 0 = M 0 K 0 . ε m ε m ε m σ εm ¨ ˙ 0 1. Constrained motion ( § 12.6 or paper LP-1): e m = e m 0 , so δe m ≡ 0 . → Solve differential equation for ε m and compute δσ em 0 . → Example of one-link manipulator. 2. Prescribed forces and torques ( § 12.6): σ em = σ em 0 , so δσ em ≡ 0 . 0 → Solve differential equation for e m and ε m . 3. Controlled trajectory motion (paper LP-1): δσ em = − δu from control 0 system. → Solve differential equation for e m and ε m . → Example of two-link manipulator. Ronald Aarts FMSA4CP-LP / 6
Constrained motion: One-link flexible manipulator m ee M eε ¯ e m δe m − δσ em � � � � � � � � � � ¯ δ ¨ 0 0 0 0 + = M εe M εε ε m K εε N εε G εε ε m σ εm ¯ ¯ 0 ¯ 0 + ¯ 0 + ¯ ¨ 0 0 0 0 Constrained motion: e m = e m ( t ) ; δe m ( t ) = 0 . 0 t < 0 , 2 t 2 + T 2 � � Ω 1 4 π 2 (cos 2 πt e m ( t ) = − 1) 0 ≤ t ≤ T, T T Ω( t − 1 2 T ) t > T. ε m + ε m = σ εm � � Flexible motion: ¯ M εε K εε ¯ 0 + ¯ N εε 0 + ¯ G εε 0 ¨ 0 0 Ronald Aarts FMSA4CP-LP / 7
Tip deflection δy using different superposition approximations 0.1 0 −0.1 1) M 0 , K 0 , N 0 and G 0 2) K 0 , N 0 and G 0 −0.2 3) M 0 , K 0 δ y [m] 4) K 0 −0.3 5) M 0 , K 0 , N 0 −0.4 1 2 −0.5 3 4 −0.6 5 −0.7 0 5 10 15 20 25 30 t [s] Ronald Aarts FMSA4CP-LP / 8
Comparison of the maximum tip deflection Model number of elements Max. deflection [m] SPACAR , non-linear 4 0.536 Wu & Haug 4 substructures 0.556 idem 6 substructures 0.543 superposition, case 1 4 0.537 idem, case 2 4 0.531 idem, case 3 4 0.569 idem, case 4 4 0.569 idem, case 5 4 ∞ � ¯ ε m = σ εm ¯ ε m + 0 + ¯ 0 + ¯ M εε K εε N εε G εε � 0 ¨ case 1 0 0 � ¯ ε m = σ εm 0 + ¯ 0 + ¯ K εε N εε G εε � case 2 0 0 � ¯ ε m = σ εm ¯ ε m + M εε K εε � case 3 0 ¨ 0 0 � ¯ ε m = σ εm K εε � case 4 0 0 � ¯ ε m = σ εm ¯ ε m + 0 + ¯ M εε K εε N εε � case 5 0 ¨ 0 0 Ronald Aarts FMSA4CP-LP / 9
Natural frequency of the first constrained bending mode 3.5 3 2.5 2 ω 1 [rad/s] 1.5 1) M 0 , K 0 , N 0 and G 0 5) M 0 , K 0 , N 0 1 0.5 0 0 5 10 15 20 25 30 t [s] det( − ω 2 i ¯ M εε 0 + ¯ K εε 0 + ¯ N εε 0 + ¯ G εε Frequency equation: 0 ) = 0 Ronald Aarts FMSA4CP-LP / 10
Perturbation method for controlled trajectory motion As before, model the vibrational motion of the manipulator as a first-order perturbation δq of the nominal rigid link motion q 0 q = q 0 + δq, Apply the two steps of the perturbation method: 1. Compute nominal rigid link motion q 0 from the non-linear equations of motion with all ε m ≡ 0 , i.e. all vibrational modes set to zero. 2. Compute the vibrational motion δq from linearised equations of motion: � � δu d ¯ q + ¯ M 0 δ ¨ q + C 0 δ ˙ K 0 δq = σ 0 , σ 0 = . σ εm 0 σ εm are the generalized stress resultants applied as internal excitation forces. 0 δu d is the control input vector (minus u 0 ) and ... Ronald Aarts FMSA4CP-LP / 11
δu d is the control input vector δu = u − u 0 , possibly minus the proportional action of the controller represented by a matrix K p δu = − K p δe m + δu d . ¯ M 0 is the system mass matrix, C 0 is the velocity sensitivity matrix, ¯ K 0 is the combined stiffness matrix defined as � � � � 0 0 K p 0 ¯ K 0 = + G 0 + N 0 + . 0 K εε 0 0 0 It includes the structural stiffness matrix K εε 0 , the geometric stiffening matrix G 0 , the dynamic stiffening matrix N 0 and the matrix K p of the proportional control action. Note that one can also take δu d = δu in which case K p = 0 and the proportional control action is not included in the linearised equation of motion. Using a realistic K p is particular beneficial for the modal analysis to be discussed next. Ronald Aarts FMSA4CP-LP / 12
Mode-superposition method Equations of motion in n principal coordinates η � � δq = Φ η Φ = φ 1 , φ 2 , . . . , φ n K S 0 − ω 2 η + ˙ ( ¯ i ¯ δ ˙ q = Φ ˙ Φ η M 0 ) φ i = 0 , i = 1 , 2 , ..., n, 0 = 1 K S K T η + 2 ˙ η + ¨ Symmetric ¯ 2 ( ¯ K 0 + ¯ δ ¨ q = Φ¨ Φ ˙ Φ η 0 ) ¯ K 0 includes K p . ˆ η + ˆ η + ˆ M ¨ C ˙ Kη = ˆ σ, where M = Φ T ¯ ˆ M 0 Φ modal mass matrix, C = Φ T C 0 Φ + 2Φ T ¯ ˆ M 0 ˙ Φ modal damping matrix, K = Φ T ¯ Φ + Φ T ¯ K 0 Φ + Φ T C 0 ˙ ˆ M 0 ¨ Φ modal stiffness matrix, σ = Φ T σ 0 ˆ modal force vector . “Adaptive Modal Integration” (AMI): Time-varying nature of modal matrix Φ is taken into account. Ronald Aarts FMSA4CP-LP / 13
Mode-Displacement Method (MDM) Solution δ ˆ q using only ˆ n < n modes � � q = ˆ ˆ δ ˆ Φˆ Φ = η, φ 1 , φ 2 , . . . , φ ˆ . n Mode-Acceleration Method (MAM) Improved convergence after rewriting the equations of motion K − 1 δq = ¯ 0 ( σ 0 − ¯ M 0 δ ¨ q − C 0 δ ˙ q ) , and substitution the MDM solution δ ˆ q in the right hand side K − 1 K − 1 q = ¯ 0 σ 0 − ¯ 0 ( ¯ M 0 δ ¨ q + C 0 δ ˙ δ ˜ ˆ ˆ q ) . First term in the expression of the MAM solution δ ˜ q represents a pseudo static response of the system. Ronald Aarts FMSA4CP-LP / 14
Controlled trajectory motion 1.76 Tip velocity [m/s] Velocity profile of the manipulator tip z 600 0 0.0 0.2 0.8 1.0 400 u 0 [N/m] σ 2 t [s] B (0, 1.300, 0) 200 σ 3 0 σ 1 −200 y 0.0 0.5 1.0 t [s] x A (0.536, 0, 0) Nominal torques u 0 for Motion trajectory the three actuators MIMO PID feedback control: δu = − ¯ M ee 0 H ( s ) δe m . M ee ¯ 0 : mass matrix for decoupling between the actuators. H ( s ) : controller with three SISO PID controllers on the diagonal. Ronald Aarts FMSA4CP-LP / 15
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.