EC3062 ECONOMETRICS LINEAR STOCHASTIC MODELS Let { x +1 , x +2 , . - PowerPoint PPT Presentation
EC3062 ECONOMETRICS LINEAR STOCHASTIC MODELS Let { x +1 , x +2 , . . . , x + n } denote n consecutive elements from a stochas- tic process. If their joint distribution does not depend on , regardless of the size of n , then the process
EC3062 ECONOMETRICS LINEAR STOCHASTIC MODELS Let { x τ +1 , x τ +2 , . . . , x τ + n } denote n consecutive elements from a stochas- tic process. If their joint distribution does not depend on τ , regardless of the size of n , then the process is strictly stationary. Any two segments of equal length will have the same distribution with (1) E ( x t ) = µ < ∞ for all t and C ( x τ + t , x τ + s ) = γ | t − s | . The condition on the covariances implies that the dispersion matrix of the vector [ x 1 , x 2 , . . . , x n ] is a bisymmetric Laurent matrix of the form γ 0 γ 1 γ 2 . . . γ n − 1 ⎡ ⎤ γ 1 γ 0 γ 1 . . . γ n − 2 ⎢ ⎥ γ 2 γ 1 γ 0 . . . γ n − 3 ⎢ ⎥ (2) Γ = , ⎢ ⎥ . . . . ... ⎢ ⎥ . . . . . . . . ⎣ ⎦ γ n − 1 γ n − 2 γ n − 3 . . . γ 0 wherein the generic element in the ( i, j )th position is γ | i − j | = C ( x i , x j ). 1
EC3062 ECONOMETRICS Moving-Average Processes The q th-order moving average MA( q ) process, is defined by (3) y ( t ) = µ 0 ε ( t ) + µ 1 ε ( t − 1) + · · · + µ q ε ( t − q ) , where ε ( t ) = { ε t ; t = 0 , ± 1 , ± 2 , . . . } is a sequence of i.i.d. random variables with E { ε ( t ) } = 0 and V ( ε t ) = σ 2 ε , defined on a doubly-infinite set of integers. We set can µ 0 = 1. The equation can also written as µ ( L ) = µ 0 + µ 1 L + · · · + µ q L q y ( t ) = µ ( L ) ε ( t ) , where is a polynomial in the lag operator L , for which L j x ( t ) = x ( t − j ). This process is stationary, since any two elements y t and y s are the same function of [ ε t , ε t − 1 , . . . , ε t − q ] and [ ε s , ε s − 1 , . . . , ε s − q ], which are identically distributed. If the roots of the polynomial equation µ ( z ) = µ 0 + µ 1 z + · · · + µ q z q = 0 lie outside the unit circle, then the process is invertible such that µ − 1 ( L ) y ( t ) = ε ( t ) , which is an infinite-order autoregressive representation. 2
EC3062 ECONOMETRICS Example. Consider the first-order MA(1) moving-average process (4) y ( t ) = ε ( t ) − θε ( t − 1) = (1 − θL ) ε ( t ) . Provided that | θ | < 1, this can be written in autoregressive form as 1 y ( t ) + θy ( t − 1) + θ 2 y ( t − 2) + · · · � � ε ( t ) = (1 − θL ) y ( t ) = . Imagine that | θ | > 1 instead. Then, to obtain a convergent series, we have to write y ( t + 1) = ε ( t + 1) − θε ( t ) = − θ (1 − L − 1 /θ ) ε ( t ) , where L − 1 ε ( t ) = ε ( t + 1). This gives θ − 1 � y ( t + 1) + y ( t + 2) � (1 − L − 1 /θ ) y ( t + 1) = − θ − 1 (7) ε ( t ) = − + · · · . θ 2 θ Normally, this would have no reasonable meaning. 3
EC3062 ECONOMETRICS The Autocovariances of a Moving-Average Process Consider γ τ = E ( y t y t − τ ) � � � � = E µ i ε t − i µ j ε t − τ − j (8) i j � � = µ i µ j E ( ε t − i ε t − τ − j ) . i j Since ε ( t ) is a sequence of independently and identically distributed random variables with zero expectations, it follows that � 0 , if i � = τ + j ; (9) E ( ε t − i ε t − τ − j ) = σ 2 ε , if i = τ + j . Therefore � γ τ = σ 2 (10) µ j µ j + τ . ε j 4
EC3062 ECONOMETRICS Now let τ = 0 , 1 , . . . , q . This gives γ 0 = σ 2 ε ( µ 2 0 + µ 2 1 + · · · + µ 2 q ) , γ 1 = σ 2 ε ( µ 0 µ 1 + µ 1 µ 2 + · · · + µ q − 1 µ q ) , (11) . . . γ q = σ 2 ε µ 0 µ q . Also, γ τ = 0 for all τ > q . The first-order moving-average process y ( t ) = ε ( t ) − θε ( t − 1) has the following autocovariances: γ 0 = σ 2 ε (1 + θ 2 ) , γ 1 = − σ 2 (12) ε θ, γ τ = 0 if τ > 1 . 5
EC3062 ECONOMETRICS For a vector y = [ y 0 , y 2 , . . . , y T − 1 ] ′ of T consecutive elements from a first- order moving-average process, the dispersion matrix is 1 + θ 2 − θ 0 . . . 0 ⎡ ⎤ 1 + θ 2 − θ − θ . . . 0 ⎢ ⎥ 1 + θ 2 0 − θ . . . 0 D ( y ) = σ 2 ⎢ ⎥ (13) . ⎢ ⎥ ε . . . . ... . . . . ⎢ ⎥ . . . . ⎣ ⎦ 1 + θ 2 0 0 0 . . . In general, the dispersion matrix of a q th-order moving-average process has q subdiagonal and q supradiagonal bands of nonzero elements and zero elements elsewhere. The empirical autocovariance of lag τ ≤ T − 1 is T − τ T − 1 c τ = 1 y = 1 � � ( y t − ¯ y )( y t + τ − ¯ y ) with ¯ y t . T T t =0 t =0 Notice that c T − 1 = T − 1 y 0 y T − 1 comprises only the first and the last ele- ment of the sample. 6
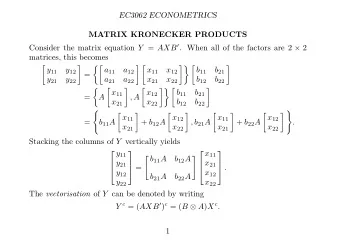
EC3062 ECONOMETRICS 4 2 0 0 − 2 − 4 − 6 0 25 50 75 100 125 The graph of 125 observations on a simulated series Figure 1. generated by an MA(2) process y ( t ) = (1 + 1 . 25 L + 0 . 80 L 2 ) ε ( t ) . 7
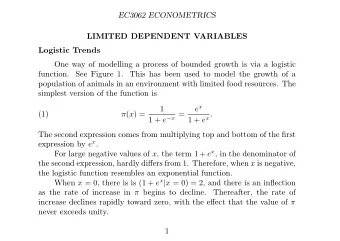
EC3062 ECONOMETRICS 1.00 0.75 0.50 0.25 0.00 − 0.25 0 5 10 15 20 25 The theoretical autocorrelations of the MA(2) process Figure 2. y ( t ) = (1 + 1 . 25 L + 0 . 80 L 2 ) ε ( t ) (the solid bars) together with their empirical counterparts, calculated from a simulated series of 125 val- ues. 8
EC3062 ECONOMETRICS Autoregressive Processes The p th-order autoregressive AR( p ) process, is defined by (17) α 0 y ( t ) + α 1 y ( t − 1) + · · · + α p y ( t − p ) = ε ( t ) . Setting α 0 = 1 identifies y ( t ) as the output. This can be written as α ( L ) = α 0 + α 1 L + · · · + α p L p . α ( L ) y ( t ) = ε ( t ) , where For the process to be stationary, the roots of the equation α ( z ) = α 0 + α 1 z + · · · + α p z p = 0 must lie outside the unit circle. This condition enables us to write the autoregressive process as an infinite-order moving-average process in the form of y ( t ) = α − 1 ( L ) ε ( t ) . 9
EC3062 ECONOMETRICS Example. Consider the AR(1) process defined by ε ( t ) = y ( t ) − φy ( t − 1) (18) = (1 − φL ) y ( t ) . Provided that the process is stationary with | φ | < 1, it can be represented in moving-average form as 1 ε ( t ) + φε ( t − 1) + φ 2 ε ( t − 2) + · · · � � (19) y ( t ) = 1 − φLε ( t ) = . The autocovariances of the AR(1) process can be found in the manner of an MA process. Thus γ τ = E ( y t y t − τ ) � � � � φ i ε t − i φ j ε t − τ − j = E (20) i j � � φ i φ j E ( ε t − i ε t − τ − j ); = i j 10
EC3062 ECONOMETRICS Since � 0 , if i � = τ + j ; (9) E ( ε t − i ε t − τ − j ) = σ 2 ε , if i = τ + j , it follows that φ j φ j + τ = σ 2 ε φ τ � γ τ = σ 2 (21) 1 − φ 2 . ε j For a vector y = [ y 0 , y 2 , . . . , y T − 1 ] ′ of T consecutive elements from a first- order autoregressive process, the dispersion matrix has the form φ 2 φ T − 1 1 φ . . . ⎡ ⎤ φ T − 2 φ 1 φ . . . σ 2 ⎢ ⎥ φ 2 φ T − 3 φ 1 . . . ε ⎢ ⎥ (22) D ( y ) = . ⎢ ⎥ 1 − φ 2 . . . . ... ⎢ ⎥ . . . . . . . . ⎣ ⎦ φ T − 1 φ T − 2 φ T − 3 . . . 1 11
EC3062 ECONOMETRICS The Autocovariances of an Autoregressive Process Multiplying � i α i y t − i = ε t by y t − τ and taking expectations gives � (24) α i E ( y t − i y t − τ ) = E ( ε t y t − τ ) . i Taking account of the normalisation α 0 = 1, we find that � σ 2 ε , if τ = 0; (25) E ( ε t y t − τ ) = 0 , if τ > 0. Therefore, on setting E ( y t − i y t − τ ) = γ τ − i , equation (24) gives � σ 2 ε , if τ = 0; � (26) α i γ τ − i = 0 , if τ > 0. i The second equation enables us to generate the sequence { γ p , γ p +1 , . . . } given p starting values γ 0 , γ 1 , . . . , γ p − 1 . 12
EC3062 ECONOMETRICS According to (26), there is α 0 γ τ + α 1 γ τ − 1 + · · · + α 2 γ τ − p = 0 for τ > 0 Thus, given γ τ − 1 , γ τ − 2 , . . . , γ τ − p for τ ≥ p , we can find γ τ = − α 1 γ τ − 1 − α 2 γ τ − 2 − · · · − α p γ τ − p . By letting τ = 0 , 1 , . . . , p in (26), we generate a set of p +1 equations, which can be arrayed in matrix form as follows: γ 0 γ 1 γ 2 . . . γ p σ 2 1 ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ε γ 1 γ 0 γ 1 . . . γ p − 1 α 1 0 ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ γ 2 γ 1 γ 0 . . . γ p − 2 α 2 0 ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ (27) = . ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ . . . . . . ... . ⎢ ⎥ ⎢ . ⎥ ⎢ ⎥ . . . . . . . . . . ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ 0 α p γ p γ p − 1 γ p − 2 . . . γ 0 These the Yule–Walker equations, which can be used for generating the values γ 0 , γ 1 , . . . , γ p from the values α 1 , . . . , α p , σ 2 ε or vice versa. 13
EC3062 ECONOMETRICS Example. For an example of the two uses of the Yule–Walker equations, consider the AR(2) process. In this case, γ 2 ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ γ 0 γ 1 γ 2 α 0 α 2 α 1 α 0 0 0 γ 1 ⎢ ⎥ ⎦ = γ 1 γ 0 γ 1 α 1 0 α 2 α 1 α 0 0 γ 0 ⎢ ⎥ ⎣ ⎦ ⎣ ⎣ ⎦ ⎢ ⎥ γ 2 γ 1 γ 0 α 2 0 0 α 2 α 1 α 0 γ 1 ⎣ ⎦ (28) γ 2 σ 2 ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ α 0 α 1 α 2 γ 0 ε ⎦ = ⎦ . = α 1 α 0 + α 2 0 γ 1 0 ⎣ ⎦ ⎣ ⎣ α 2 α 1 α 0 γ 2 0 Given α 0 = 1 and the values for γ 0 , γ 1 , γ 2 , we can find σ 2 ε and α 1 , α 2 . Conversely, given α 0 , α 1 , α 2 and σ 2 ε , we can find γ 0 , γ 1 , γ 2 . Notice how the matrix following the first equality is folded across the axis which divides it vertically to give the matrix which follows the second equality. 14
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.