Distributional averaging of switched DAEs with two modes Stephan - PowerPoint PPT Presentation
Distributional averaging of switched DAEs with two modes Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany 54th IEEE Conference on Decision and Control, Osaka, Japan Wednesday, 16th December 2015, WeC10.6, 17:40-18:00
Distributional averaging of switched DAEs with two modes Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany 54th IEEE Conference on Decision and Control, Osaka, Japan Wednesday, 16th December 2015, WeC10.6, 17:40-18:00
Introduction and motivating examples Distributions A first distributional averaging result Contents Introduction and motivating examples 1 Distributions 2 A first distributional averaging result 3 Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
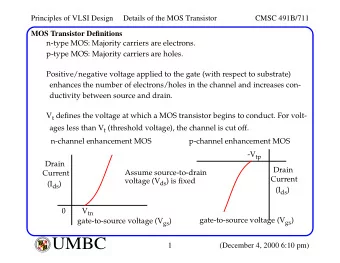
Introduction and motivating examples Distributions A first distributional averaging result Switched differential algebraic equations Switched DAE: Circuit example: Mode 1 (switch closed): d i L d t u = 0 E σ ˙ x = A σ x L d d t i L = v L u v L 0 = v L − u L Major differences to switched ODEs Mode 2 (switch open): Due to changing constraints, we see d d t u = 0 Induced state jumps L d d t i L = v L Dirac impulses in the state variables 0 = i L Solution of example (switch at t = 0 from mode 1 to mode 2): v L ( t ) i L ( t ) u t t 0 0 δ Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Averaging: Basic idea switched non-switched ≈ σ system averaged system fast switching Application Fast switches occurs at Pulse width modulation ”Sliding mode“-control In general: fast digital controller Simplified analyses Stability for sufficiently fast switching In general: (approximate) desired behavior via suitable switching Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Periodic switching signal Switching signal σ : R → { 1 , 2 , . . . , M } has the following properties piecewise-constant and periodic with period p > 0 duty cycles d 1 , d 2 , . . . , d M ∈ [0 , 1] with d 1 + d 2 + . . . + d M = 1 switched non-switched σ, p ≈ system averaged system x σ, p x av fast switching Desired approximation result On any compact time interval it holds that x σ, p → x av as p → 0 Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Averaging and Dirac impulses: Example Mode 1 Mode 2 x 1 = 0 , ˙ 0 = x 2 , x 2 = x 3 ˙ x 1 = 0 , ˙ x 2 = x 1 , ˙ x 3 = 0 ˙ x 1 t x 2 t x 3 t Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Dirac impulses vanish? Fact 1 Fact 2 Impulse-free part of solution converges Dirac impulse magnitude proportional to ⇒ Jump heights converge to zero jump heights. Hope Dirac impulses don’t play a role in the limit of averaging process. WRONG! x 3 = − � ∞ k =1 d 2 px 0 In the example we have: 1 δ kp . Accumulation of Dirac impulses Magnitude of Dirac impulses are proportional to period p , BUT number of Dirac impulses is proportional to 1 / p Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Relevance in reality? Consider a differentiable approximation H ε of the Heaviside step function and its derivative δ ε : δ ε ( t ) H ε ( t ) t t - ε ε - ε ε x ε 3 Approximation of x 3 t ∞ � x ε d 2 px 0 1 δ ε 3 = − kp k =1 Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Contents Introduction and motivating examples 1 Distributions 2 A first distributional averaging result 3 Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Distributions: Basic definitions Test functions Distributions � � � � � � ϕ is smooth with D is linear and D : C ∞ → R C ∞ � � := ϕ : R → R D := � � 0 compact support continuous � � Lemma (Generalized functions) Lemma (Dirac impulse) For any locally integrable function α : R → R : For any t 0 ∈ R we have � α D : C ∞ δ t 0 : C ∞ → R , ϕ �→ αϕ ∈ D → R , ϕ �→ ϕ ( t 0 ) ∈ D 0 0 R Definition (Piecewise-smooth distributions) D f = α D , α ∈ C ∞ � � � pw , D = D f + D [ · ] ∈ D � D pw C ∞ := � t ∈ T D t , T is discrete , D t ∈ span { δ t , δ ′ t , δ ′′ D [ · ] = � t , . . . } � Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Convergence of distributions Definition (Convergence of distributions) ∀ ϕ ∈ C ∞ D n → D D as n → ∞ : ⇔ : D n ( ϕ ) → R D ( ϕ ) as n → ∞ 0 x 3 = − � ∞ let ϕ ∈ C ∞ k =1 d 2 px 1 Recall example: 0 δ kp , with supp ϕ ∈ [0 , T ] then 0 ∞ � d 2 px 1 x 3 ( ϕ ) = − 0 δ kp ( ϕ ) k =1 ⌊ T / p ⌋ � = − d 2 x 1 p ϕ ( kp ) 0 k =1 � T → − d 2 x 1 ϕ 0 0 = ( − d 2 x 1 0 ) D ( ϕ ) x 3 → D − d 2 x 1 Hence 0 Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Contents Introduction and motivating examples 1 Distributions 2 A first distributional averaging result 3 Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Some DAE notation Theorem (Quasi-Weierstrass form, Weierstraß 1868 ) ( E , A ) regular : ⇔ det( sE − A ) �≡ 0 ⇔ ∃ S , T invertible: �� I � � J �� 0 0 ( SET , SAT ) = , , N nilpotent 0 N 0 I Can easily obtained via Wong sequences ( Berger, Ilchmann & T. 2012) Definition (Consistency projector) � I � 0 T − 1 Π := T 0 0 Definition ( A diff and E imp ) � � � � J 0 0 0 A diff := T E imp := T T − 1 , T − 1 0 0 0 N Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Averaging result x (0 − ) = x 0 E σ ˙ x = A σ x , (swDAE) In the following we consider (swDAE) with two modes and switching period p > 0. Theorem (Averaging result of impulse-free part, Iannelli, Pedicini, T. & Vasca 2013 ) Consider (swDAE) with regular matrix pairs ( E 1 , A 1 ) and ( E 2 , A 2 ) . Assume Π 1 Π 2 = Π 2 Π 1 =: Π ∩ and let the averaged system be given as x av = Π ∩ A diff ˙ av Π ∩ x av , , x av (0) = Π ∩ x 0 where A diff av = d 1 A diff + d 2 A diff 2 . Then 1 x − x [ · ] → x av uniformly on any compact interval as p → 0 . Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Averaging result x (0 − ) = x 0 E σ ˙ x = A σ x , (swDAE) In the following we consider (swDAE) with two modes and switching period p > 0. Theorem (Distributional averaging) Consider (swDAE) with regular matrix pairs ( E 1 , A 1 ) and ( E 2 , A 2 ) . Assume Π 1 Π 2 = Π 2 Π 1 =: Π ∩ and let the averaged system be given as x av = Π ∩ A diff ˙ av Π ∩ x av , , x av (0) = Π ∩ x 0 where A diff av = d 1 A diff + d 2 A diff 2 . Then 1 x → D ( I − E imp av ) x av D on any compact interval as p → 0 , := � n − 2 i =0 ( d 1 ( E imp + d 2 ( E imp where E imp ) i +1 A diff ) i +1 A diff 2 )( A diff av ) i . av 2 1 1 Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Introduction and motivating examples Distributions A first distributional averaging result Summary x → D ( I − E imp E σ ˙ x = A σ x x av = A av x av ˙ av ) x av First result on averaging for distributional solutions Dirac impulses vanish in the limit but cannot be neglected! Convergence towards a smooth trajectory (without jumps and Dirac impulses) Difference from impulse-free limit Practical relevance illustrated by considering approximations of Dirac impulses Future challenges: Generalization to more than two modes (not trivial!) Weakening of commutativity assumption of consistency projectors Consideration of inhomogeneous switched DAEs Stephan Trenn Technomathematics group, University of Kaiserslautern, Germany Distributional averaging of switched DAEs with two modes
Recommend



More recommend
Explore More Topics
Stay informed with curated content and fresh updates.