Differential Kinematics Robert Platt Northeastern University - PowerPoint PPT Presentation
Differential Kinematics Robert Platt Northeastern University Differential Kinematics Up to this point, we have only considered the relationship of the joint angles to the Cartesian location of the end effector: f ( q ) x f (
Differential Kinematics Robert Platt Northeastern University
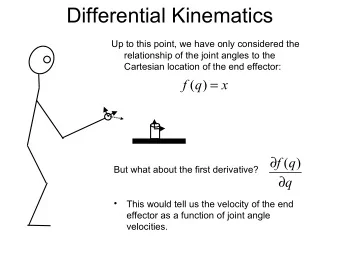
Differential Kinematics Up to this point, we have only considered the relationship of the joint angles to the Cartesian location of the end effector: f ( q ) x f ( q ) But what about the first derivative? q • This would tell us the velocity of the end effector as a function of joint angle velocities.
Motivating Example Consider a one-link arm • As the arm rotates, the end effector sweeps out an arc • Let’s assume that we are only x interested in the coordinate… l q x x l cos( q ) Forward kinematics: l sin( q ) dx Differential kinematics: dq x l sin( q ) q 1 q x l sin( q )
Motivating Example Suppose you want to move the end Goal: move the end x effector above a specified point, effector onto this line g Answer #1: 0 i 0 , q arbitrary 1. Answer #2: l q x x l cos( q ) 2. x i i g x x x 3. g i 1 4. q x l sin( q ) i q q q 5. i 1 i i 6. goto 2.
Motivating Example l q x x g q q q x 1 d x joint ctlr g l sin( q ) x q joint position l cos() sensor This controller moves the link asymptotically toward the goal position.
Intro to the Jacobian x = [ l 1 sin ( q 1 )+ l 2 sin ( q 1 + q 2 ) ] l 1 cos ( q 1 )+ l 2 cos ( q 1 + q 2 ) Forward kinematics of the two- ⃗ link manipulator l 2 q 2 y Velocity Jacobian l 1 q 1 x = J ( q )
Intro to the Jacobian x J q Chain rule: l 2 If the Jacobian is square q and full rank, then we 2 1 q J x can invert it: y l q 1 1 x joint ctlr 1 J joint position sensor
Jacobian The Jacobian relates joint velocities with end effector twist : J q Joint angle velocities End effector twist • First derivative of joint angles: Jacobian It turns out that you can “easily” compute the Jacobian for arbitrary manipulator structures • This makes differential kinematics a much easier sub-problem than kinematics in general.
What is Twist? End effector twist: Linear velocity • Twist is a concatenation of linear velocity and angular velocity: Angular velocity • As we will show in a minute, linear and angular velocity have different units
What is Twist? End effector twist: Linear velocity • Twist is a concatenation of linear velocity and angular velocity: Angular velocity • As we will show in a minute, linear and angular velocity have different units What is angular velocity? Angular velocity is a vector that: – points in the direction of the axis of rotation – has magnitude equal to the velocity of rotation
What is Angular Velocity? Angular velocity is a vector that: – points in the direction of the axis of rotation – has magnitude equal to the velocity of rotation Symbol for angular velocity: Relation between angular velocity and linear velocity: We will often write it this way:
Angular Velocity Derivation b b a q R q a b b a q R q Just differentiate all elements of a the rotation matrix w.r.t. time. T b b b b q R R q a a This is the matrix representation T b b b S R R of angular velocity a a q This FO differential equation b b b q S encodes how the particle rotates
Twist: Time out for skew symmetry! T Def’n of skew symmetry S S S = [ 0 ] 0 a b Skew symmetric matrices − a 0 c always look like this − b − c S ( x ) = [ 0 ] − x z 0 x y − x x x z 0 If you interpret the skew symmetric matrix like this: − x y x x Then this is another way of writing S x p x p the cross product:
Angular Velocity Derivation b S Skew symmetry of : T b b I R R a a T T b b b b 0 R R R R a a a a T T b b b b R R R R a a a a T b b S S q b b b q S b b b You probably already know this q q formula
Twist Twist concatenates linear and angular velocity: Linear velocity ξ = [ ω ] v Angular velocity
Jacobian v v J q Breakdown of the Jacobian: J q ξ = [ J ω ] ˙ J v q x r J v J Relation to the derivative: but q q That’s not an angular velocity
Calculating the Jacobian eff x eff Approach: y • l Calculate the Jacobian one column at a 3 time q eff 1 x 3 • Each column describes the motion at the end effector due to the motion of that joint eff 1 y only. • For each joint, i , pretend all the other joints 1 x 1 are frozen, and calculate the motion at the y end effector caused by i. q 2 l 2 0 y l 1 q 1 0 x 0 z
Calculating the Jacobian: Velocity i x • i 1 The velocity of the end effector x i 1 y caused by motion at the i-1 link: b b b b l p p p i eff i 1 i 1 , eff i 1 , i i y Velocity at end effector due to change in length of link i-1 Velocity at end effector due to rotation at joint i-1
Calculating the Jacobian: Velocity i 1 x i 1 y Rotational DOF q i • Rotates about i 1 z i x b b J z p l v i 1 i 1 , eff i i i 1 z i b b b y J z p p i z v i 1 eff i 1 i i 1 z Rotation about i 1 y Vector from i-1 to the end l i i 1 z effector i x Prismatic DOF i y i 1 x i • z Translates along i 1 z b J z i 1 Extension/contraction along z v i 1 i
Calculating the Jacobian: Velocity i 1 x i 1 y Rotational DOF q i • Rotates about i 1 z i x b z J l i 1 , i i i i 1 z i y i z i 1 z Rotation about i 1 y l i i 1 z i x Prismatic DOF • Translates along i 1 z i y i 1 x i z J 0 i i 1 Extension/contraction along z
Calculating the Jacobian: putting it together J v = [ J v 1 J v n ] ⋯ Where b b b J z p p • rotational eff x v i 1 eff i 1 i b J z • prismatic v i 1 i eff y l J ω = [ J ω 1 J ω n ] 3 ⋯ q eff 1 x 3 Where eff 1 y b z • J rotational i 1 1 x i 1 y J 0 • prismatic q i 2 l 2 J = [ J ω n ] J v 1 ⋯ J v n 0 y l 1 J ω 1 ⋯ q 1 0 x 0 z
Example 1: calculating the Jacobian 3 x From before: 3 0 T 1 = ( 1 ) 1 T 2 = ( 1 ) y − s q 1 c q 2 − s q 2 0 l 2 c q 2 c q 1 0 l 1 c q 1 l 3 s q 2 c q 2 0 l 2 s q 2 s q 1 c q 1 0 l 1 s q 1 l q 2 3 2 x 1 x 0 0 1 0 0 0 1 0 1 y 0 0 0 0 0 0 q 2 2 T 3 = ( 1 ) 2 y − s q 3 c q 3 0 l 3 c q 3 0 y s q 3 c q 3 0 l 3 s q 3 q 1 0 x l 0 0 1 0 1 0 z 0 0 0 z 2 ] = [ 1 ] 0 0 0 J ω = [ 0 ^ 0 ^ 0 ^ z 0 z 1 0 0 0 1 1
Example 1: calculating the Jacobian × ( [ ] = [ ] 0 ] ) 0 o 0 )= [ 1 ] − [ l 1 c 1 + l 2 c 12 + l 3 c 123 − l 1 s 1 − l 2 s 12 − l 3 s 123 0 0 0 ^ 0 o 3 − J v 1 = z 0 ¿( 0 l 1 s 1 + l 2 s 12 + l 3 s 123 0 l 1 c 1 + l 2 c 12 + l 3 c 123 0 0 × ( [ ] − [ 0 ] ) = [ ] 0 o 1 )= [ 1 ] l 1 c 1 + l 2 c 12 + l 3 c 123 l 1 c 1 − l 2 s 12 − l 3 s 123 0 0 ^ 0 o 3 − J v 2 = z 1 ¿( 0 l 1 s 1 + l 2 s 12 + l 3 s 123 l 1 s 1 l 2 c 12 + l 3 c 123 0 0 × ( [ ] − [ ] ) = [ 0 ] 0 o 2 )= [ 1 ] l 1 c 1 + l 2 c 12 + l 3 c 123 l 1 c 1 + l 2 c 12 − l 3 s 123 0 0 ^ 0 o 3 − J v 3 = z 2 ¿( 0 l 1 s 1 + l 2 s 12 + l 3 s 123 l 1 s 1 + l 2 s 12 l 3 c 123 0 0 3 x J v = [ 0 ] − l 1 s 1 − l 2 s 12 − l 3 s 123 − l 2 s 12 − l 3 s 123 − l 3 s 123 3 y l 3 l 1 c 1 + l 2 c 12 + l 3 c 123 l 2 c 12 + l 3 c 123 l 3 c 123 l q 2 2 3 x 1 x 1 y q 0 0 2 2 y 0 y q 1 0 x l 1 0 z
Example 1: calculating the Jacobian [ 1 ] − l 1 s 1 − l 2 s 12 − l 3 s 123 − l 2 s 12 − l 3 s 123 − l 3 s 123 l 1 c 1 + l 2 c 12 + l 3 c 123 l 2 c 12 + l 3 c 123 l 3 c 123 J = [ J ω ] J v 0 0 0 = 0 0 0 0 0 0 3 x 1 1 3 y l 3 l q 2 3 2 x 1 x 1 y q 2 2 y 0 y q 1 0 x l 1 0 z
Think-pair-share 2 x l 2 2 y 1 x 1 y q 2 0 y q 1 0 x l 1 0 z Calculate the end effector Jacobian with respect to the base frame
Example 2: calculating the Jacobian The kinematics of this arm are y 2 x 2 described by the following: y 3 q 3 0 T 1 = ( 1 ) − c 1 − s 1 0 0 l 3 z 2 y 1 − s 1 0 c 1 0 0 1 0 l 1 z 3 l 2 x 3 0 0 0 q 2 x 1 1 T 2 = ( 1 ) − s 2 c 2 0 l 2 c 2 z 1 l 1 s 2 c 2 0 l 2 s 2 z 0 0 0 1 0 0 0 0 x 0 q 1 2 T 3 = ( 1 ) c 3 − s 3 0 l 3 c 3 y 0 s 3 c 3 0 l 3 s 3 0 0 1 0 0 0 0
Recommend














More recommend
Explore More Topics
Stay informed with curated content and fresh updates.