Review Cedric Fischer and Michael Mattmann Institute of Robotics - PowerPoint PPT Presentation
Review Cedric Fischer and Michael Mattmann Institute of Robotics and Intelligent Systems Department of Mechanical and Process Engineering (DMAVT) ETH Zurich Mechanical Design Robot Components: Actuators Sensors End-effectors
Review Cedric Fischer and Michael Mattmann Institute of Robotics and Intelligent Systems Department of Mechanical and Process Engineering (DMAVT) ETH Zurich
Mechanical Design § Robot Components: § Actuators § Sensors § End-effectors § … § Precision, Accuracy, Resolution
Rigid Body Motion § Degree of Freedom (DoF) § DoF in d-dimensional space § ! : translational DoF "("$%) : rotational DoF § ' § SO(3) : Special Orthogonal group § ( ) = ( $% ∈ ,-(3) § Each column of R is a unit vector. § The columns of R are mutually orthogonal. § !/0( = 1 § SE(3) : Special Euclidean group § ( 2 1 , ( ∈ ,- 3 , 2 ∈ ℝ 6 0
Rule of Composition of Rotations § Postmultiply for rotations about the current frame z 0 z 1, z 2 z 0 z 1 z 2 θ y 2 R = R y, φ R z, θ y 2 y 1 y 0, y 1 y 0 x 0 x 0 ϕ x 1 x 1 x 2 x 2 R y, φ R z, θ § Premultiply for rotations about the original/fixed frame z 0 z 0 z 0 z 1 z 2 θ R = R y, φ [ R y, − φ R z, θ R y, φ ] y 2 y 2 = R z, θ R y, φ y 0 y 0 y 0 x 0 x 0 x 0 ϕ x 2 x 1 x 2 R y, φ R y, − φ R z, θ R y, φ 4
D-H Convention § Assume two features: § DH1: The Z axis is pointing in the direction of movement § DH2: The axis X i is perpendicular to Z i-1 § DH3: The axis X i intersects the axis Z i-1 angle from x i-1 to x i measured in a plane normal to z i-1 • θ i : joint angle distance from o i-1 to intersection of x i and z i-1 measured along z i-1 • d i : link o ff set distance between z i-1 and z i measured along x i • a i : link length angle between z i-1 and z i measured in a plane normal to x i • α i : link twist 5
Question 1 Exam 2016 • angle from x i-1 to x i measured in a plane normal to z i-1 θ i : joint angle d i : link o ff set • distance from o i-1 to intersection of x i and z i-1 measured along z i-1 a i : link length • distance between z i-1 and z i measured along x i α i : link twist • angle between z i-1 and z i measured in a plane normal to x i
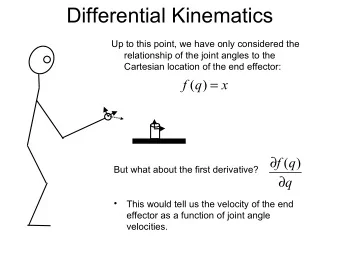
Forward/Inverse Kinematics § Kinematics: To describe the motion of the manipulator without consideration of the forces and torques causing the motion : A Geometric Description. § Forward Kinematics § To determine the position and orientation of the end effector with the given values for the joint variables. § D-H convention § Screw Theory § Inverse Kinematics § To determine the joint variables with the given the end effector’s position and orientation.
Screw Theory § Every rigid body motion can be realized by a l rotation about an axis combined with a M translation parallel to that axis. h § Screw parameters: § Pitch h § Ratio of translational motion to rotational motion § Axis l § Axis of rotation, line through a point § Direction of translation § Magnitude M § Amount of displacement § Net rotation and/or translation
Screw Theory: Mathematical Description General description Twist ( 4x4) Twist Coordinates ( 6x1) with Revolute joint Prismatic joint ℎ = 0 à 8 = −:×< + > ℎ: = −:×< ℎ = ∞ à 8 = 8 ? # & # & ! $ ! $ ˆ − ω × q − ω × q ω v 0 v ˆ ˆ ξ = % ( ξ = % ( ξ = ξ = # & # & 0 0 0 % ( % 0 0 ( ω " % " % $ ' $ ' Derivation: page 39 – A Mathematical Introduction to Robotic Manipulation 1994 9
Rodrigues’ Formula § All rotation matrices can be written as a matrix exponential of a skew-symmetric matrix! ω 2 1 − cos θ ωθ = I + ˆ ˆ ω sin θ + ˆ ( ) Rodrigues’ Formula: e # & ˆ ( ˆ ) ω × v ωθ ωθ Homogeneous ( ) + h θω e I − e ξθ = ˆ % ( e Transformation (4x4) % ( 0 1 $ ' Prismatic joint Revolute joint # & ˆ ( ˆ ) ω × v ! $ ωθ ωθ e I − e ( ) I θ v ξθ = ξθ = ˆ ˆ % ( e e # & % ( 0 1 " % 0 1 $ ' 10
Example Exam 2017 § Find screw parameter § Find twist Joint 1 à Revolute Joint 2 à Prismatic # & ! $ − ω × q v ξ = ξ = % ( # & 0 % ω ( " % $ '
Try different manipulators … A C 0 0 0 q 1 = 0 q 2 = 0 q 3 = l 1 l 1 z D E A B l 0 l 0 0 l 2 0 1 0 y z T x ω 1 = 0 ω 2 = 0 ν 3 = 1 l 0 1 0 0 0 0 1 0 0 0 c 1 − s 1 S 0 0 0 s 1 c 1 c 2 − s 2 l 0 s 2 y ξ 1 θ 1 = ˆ ξ 2 θ 2 = ˆ e e x 0 0 1 0 0 l 0 (1 − c 2 ) s 2 c 2 0 0 0 1 0 0 0 1 1 0 0 0 1 0 0 0 0 1 0 θ 3 0 1 0 l 1 + l 2 ξ 3 θ 3 = ˆ g st (0) = e 0 0 1 0 0 0 1 l 0 0 0 0 1 0 0 0 1 c 1 − s 1 c 2 s 1 s 2 − s 1 c 2 ( θ 3 + l 1 + l 2 ) c 1 c 2 ( θ 3 + l 1 + l 2 ) s 1 c 1 c 2 − c 1 s 2 g st = 0 l 0 + s 2 ( θ 3 + l 1 + l 2 ) s 2 c 2 0 0 0 1
Rigid Body Velocity q : a point attached to the rigid body F H F G R ab ( t ) � p ab ( t ) g ab ( t ) = 0 1 the rigid body motion of the frame B attached to the body, y, relative to a fixed or inertial frame A M ×< K + 8 KL M § Spatial velocity : 8 I J = : KL L ×< L + 8 KL L § Body velocity : 8 I N = : KL
̇ ̇ Spatial and body velocity – General case More detailed explanation p.54 • Rotation and translation P KL (0) is not particularly useful As previously $% and P KL $% ̇ P KL P KL P KL have some special significance But • Spatial velocity (in twist form) • Body velocity (in twist form) • Body velocity • Spatial velocity (in twist coordinates) (in twist coordinates) 16
Spatial and body velocity – General case Body velocity Spatial velocity (in twist coordinates) (in twist coordinates) • Transformation from body to spatial velocity: ) ( 6 x 6 ) & ˆ # R p R = , Ad Adjoint transformation $ ! g 0 R % " • The adjoint transformation is invertible More detailed explanation p.54 17
Rigid Body Velocity Spatial velocity Body velocity § Point of the body § Point of the body § Expressed in spatial coordinates § Expressed in body coordinates § Velocity of that point written in § Velocity of that point with respect to spatial coordinates the spatial frame written in body coordinates v abs is the velocity of a point (possibly v abb is the velocity of the origin of the imaginary) attached to the body frame and passing through the origin of the spatial body frame (relative to the spatial frame) frame, written in spatial coordinates written in the body coordinates w abs is the instantaneous angular velocity w abb is the angular velocity of the body of the body as viewed in the spatial frame frame, written in the body coordinates 18
̇ Jacobian Velocity V L = R L ̇ Q § Relates the joint velocities to the body velocity Inverse Kinematics Q = R $% 8 ? § Relates Cartesian space to joint space : ? Static force control S = R ) T § Defined by the virtual work principle U Singularity identification § Rank loss implied a sigularity 20
Question 2 Exam 2016 § Each column of the spatial manipulator Jacobian: the twist coordinates with respect to the spatial frame, when the manipulator is in an arbitrary configuration. 0 0 ω 0 q 0 1 = 0 1 = 0 l 2 + θ 3 1 0 X Y ′ l 3 + θ 4 X E ′ c 1 0 θ 2 x ω 0 q 0 l 1 2 = s 1 2 = 0 l 0 0 T θ 2 y z − s 1 c 2 − s 1 s 2 ν 0 ν 0 c 1 c 2 c 1 s 2 3 = 4 = s 2 − c 2 A B ′ z A C ′ § Pure rotation motion § Pure translation motion l 0 θ 1 S y x § compare with the result using Adjoint θ 1
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.