DIFFERENTIAL EQUATIONS, PHASE PORTRAITS Consider a system of two - PDF document
DIFFERENTIAL EQUATIONS, PHASE PORTRAITS Consider a system of two linear homogeneous first-order differential equations x = A x . Let 1 , 2 be the eigenvalues of the coefficient matrix A . There are the following possibilities. (1) 1 ,
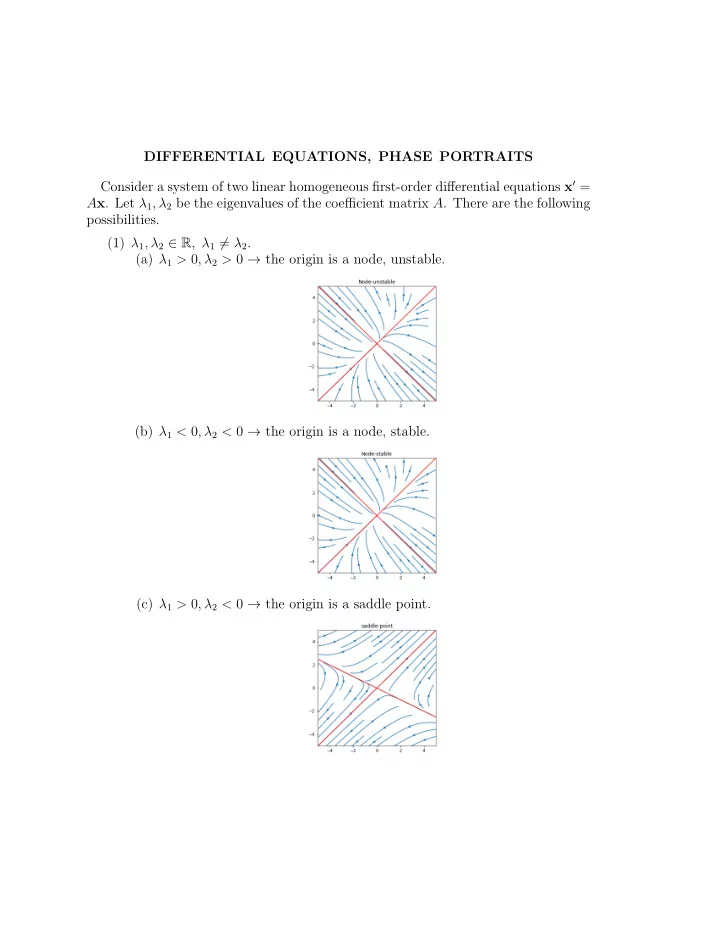
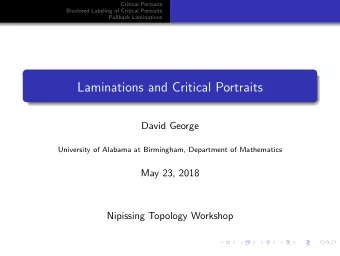
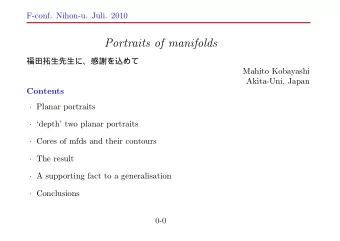
DIFFERENTIAL EQUATIONS, PHASE PORTRAITS Consider a system of two linear homogeneous first-order differential equations x ′ = A x . Let λ 1 , λ 2 be the eigenvalues of the coefficient matrix A . There are the following possibilities. (1) λ 1 , λ 2 ∈ R , λ 1 � = λ 2 . (a) λ 1 > 0 , λ 2 > 0 → the origin is a node, unstable. (b) λ 1 < 0 , λ 2 < 0 → the origin is a node, stable. (c) λ 1 > 0 , λ 2 < 0 → the origin is a saddle point.
2 DIFFERENTIAL EQUATIONS, PHASE PORTRAITS (d) λ 1 > 0 , λ 2 = 0 → the eigenspace corresponding to λ = 0 (in green) is an unstable line. (e) λ 1 < 0 , λ 2 = 0 → the eigenspace corresponding to λ = 0 (in green) is a stable line. (2) λ 1 , λ 2 ∈ R , λ 1 = λ 2 , two eigenvectors. (a) λ 1 = λ 2 > 0 → the origin is a star, unstable. (b) λ 1 = λ 2 < 0 → the origin is a star, stable.
DIFFERENTIAL EQUATIONS, PHASE PORTRAITS 3 (3) λ 1 , λ 2 ∈ R , λ 1 = λ 2 , one eigenvector. (a) λ 1 = λ 2 > 0 → the origin is a improper node, unstable. (b) λ 1 = λ 2 < 0 → the origin is a improper node, stable. (4) λ 1 , λ 2 ∈ C , λ 1 = λ + iµ, λ 2 = λ − iµ (a) λ > 0 → the origin is a spiral point unstable.
4 DIFFERENTIAL EQUATIONS, PHASE PORTRAITS (b) λ < 0 → the origin is a spiral point stable. (c) λ = 0 → the origin is a center.
Recommend

















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.