
Design of PID controller for real-time position control of Fast - PowerPoint PPT Presentation
KSTAR Conference 2014 Mayhills resort, Gangwon-do, Korea, February 24-26, 2014 Design of PID controller for real-time position control of Fast Reciprocating Probe Assembly to plasma Last Closed Flux Surface in KSTAR Gi Wook Shin a , S.H. Hahn a,b ,
KSTAR Conference 2014 Mayhills resort, Gangwon-do, Korea, February 24-26, 2014 Design of PID controller for real-time position control of Fast Reciprocating Probe Assembly to plasma Last Closed Flux Surface in KSTAR Gi Wook Shin a , S.H. Hahn a,b , H.S. Kim b , J.G. Bak b , Y.S. Bae b a University of Science and Technology, Korea b National Fusion Research Institute, Daejeon, Korea Email address: gwshin@nfri.re.kr
Abstract ¡Many ¡diagnos+cs ¡for ¡obtaining ¡informa+on ¡of ¡plasma ¡proper+es ¡exist ¡inside ¡tokamak. ¡ Since ¡plasma ¡inside ¡vacuum ¡vessel ¡is ¡extraordinarily ¡hot, ¡the ¡diagnos+cs ¡need ¡to ¡keep ¡some ¡ gap ¡ from ¡ the ¡ boundary ¡ of ¡ the ¡ plasma ¡ to ¡ prevent ¡ damages. ¡ Fast ¡ Reciproca+ng ¡ Probe ¡ Assembly ¡ (FRPA)in ¡ KSTAR, ¡ one ¡ of ¡ electric ¡ probe ¡ diagnos+cs, ¡ is ¡ a ¡ device ¡ for ¡ scanning ¡ a ¡ distance ¡of ¡up ¡to ¡about ¡40 ¡cm ¡to ¡collect ¡the ¡spa+al ¡profile ¡of ¡basic ¡plasma ¡parameters ¡in ¡the ¡ edge ¡region ¡of ¡the ¡KSTAR ¡plasma. ¡The ¡+p ¡of ¡the ¡FRPA ¡should ¡keep ¡distance ¡from ¡Last ¡Closed ¡ Flux ¡Surface ¡(LCFS). ¡That ¡is ¡because ¡the ¡+p ¡would ¡get ¡damaged ¡in ¡the ¡case ¡of ¡touching ¡the ¡ LCFS. ¡In ¡the ¡previous ¡KSTAR ¡campaigns, ¡FRPA ¡was ¡only ¡used ¡once ¡or ¡twice ¡during ¡a ¡plasma ¡ discharge ¡because ¡there ¡is ¡no ¡control ¡system ¡for ¡keeping ¡distance ¡between ¡LCFS ¡and ¡the ¡+p ¡ of ¡ FRPA ¡ in ¡ real-‑+me. ¡ In ¡ this ¡ study, ¡ we ¡ present ¡ a ¡ Simulink ¡ model ¡ of ¡ a ¡ real-‑+me ¡ feedback ¡ control ¡system ¡using ¡PID ¡controller ¡in ¡response ¡of ¡changing ¡LCFS ¡to ¡maintain ¡user-‑designated ¡ distance ¡from ¡the ¡LCFS. ¡By ¡loading ¡informa+on ¡of ¡real-‑+me ¡EFIT ¡and ¡using ¡an ¡algorithm ¡that ¡ can ¡calculate ¡distances ¡between ¡the ¡LCFS ¡and ¡a ¡posi+on ¡of ¡the ¡+p, ¡we ¡can ¡find ¡the ¡minimum ¡ distance ¡from ¡the ¡+p ¡and ¡the ¡posi+on ¡on ¡the ¡LCFS ¡that ¡have ¡the ¡distance. ¡And ¡then, ¡we ¡can ¡ make ¡ a ¡ closed ¡ loop ¡ control ¡ model ¡ using ¡ PID ¡ controller ¡ by ¡ inser+ng ¡ the ¡ calculated ¡ results. ¡ Using ¡ the ¡ experimental ¡ data ¡ of ¡ 2013 ¡ KSTAR ¡ campaign, ¡ an ¡ actuator ¡ model ¡ of ¡ the ¡ FRPA ¡ movement ¡is ¡made ¡under ¡the ¡assump+on ¡that ¡the ¡actuator ¡system ¡is ¡linear. ¡Also, ¡the ¡gains ¡of ¡ P, ¡I, ¡and ¡D ¡controllers ¡are ¡manually ¡tuned. ¡ ¡
Purpose q ¡ ¡In ¡order ¡to ¡avoid ¡efficiently ¡physical ¡damage ¡of ¡ a ¡+p ¡of ¡FRPA ¡caused ¡by ¡touching ¡plasma ¡LCFS ¡ q ¡ ¡To ¡maintain ¡a ¡constant ¡distance ¡between ¡LCFS ¡ and ¡ the ¡ +p ¡ of ¡ FRPA ¡ through ¡ PID ¡ controller ¡ during ¡ plasma ¡ opera+on ¡ so ¡ as ¡ to ¡ get ¡ plasma ¡ proper+es ¡securely ¡
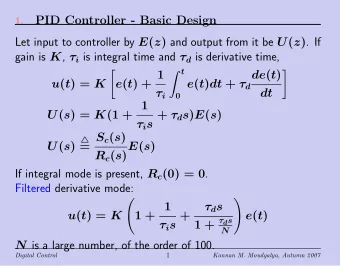
Background q PID ¡Controller ¡ ( P ropor+onal-‑ I ntegral-‑ D eriva+ve ¡Controller) ¡ Calculate ¡ an ¡ error ¡ value ¡ as ¡ the ¡ difference ¡ between ¡ a ¡ measured ¡process ¡variable ¡and ¡a ¡desired ¡set ¡point ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡need ¡to ¡set ¡gain ¡values ¡for ¡the ¡three ¡controllers ¡ ¡ ¡
Algorithm Extract�information�of�LCFS�from�rtEFIT�data� Calculate�a�distance�between�all�points�on�LCFS�and�a�tip�of�FRPA�(vertex)� Search�a�point�which�has�a�minimum�distance� �Make�a�structure�of�the�minimum�distance�corresponding�to�operation�time� �Feedback�control�using�PID�controller�for�keeping�a�constant�distance�
Description of the algorithm q Extract ¡LCFS ¡and ¡total ¡+me ¡ 1. Load ¡informa+on ¡of ¡the ¡Ψ(r,z,t) ¡from ¡MDS+DB ¡server ¡ 2. Check ¡the ¡size ¡of ¡Ψ(r,z,t) ¡matrix ¡to ¡get ¡the ¡number ¡of ¡total ¡ +me ¡ 3. Separate ¡the ¡r ¡and ¡z ¡components ¡from ¡Ψ(r,z,t) ¡ 4. Create ¡the ¡sorted ¡LCFS ¡composed ¡of ¡r ¡and ¡z ¡ 5. Exclude ¡a ¡value ¡if ¡there ¡is ¡a ¡value ¡which ¡is ¡r=0 ¡and ¡z=0 ¡ 6. Save ¡the ¡sorted ¡LCFS ¡matrix ¡
Description of the algorithm q Calculate ¡a ¡distance ¡for ¡posi+on ¡control ¡ 1. Calculate ¡distances ¡between ¡all ¡points ¡on ¡LCFS ¡and ¡the ¡+p ¡of ¡FRPA ¡ 2. Find ¡a ¡minimum ¡distance ¡among ¡the ¡distances ¡ q Make ¡ a ¡ structure ¡ of ¡ the ¡ minimum ¡ distances ¡ corresponding ¡to ¡opera+on ¡+me ¡ q Send ¡ the ¡ data ¡ of ¡ minimum ¡ distances ¡ to ¡ the ¡ feedback ¡loop ¡using ¡PID ¡controller ¡
Minimum distances during operation time # 8021 8021 q The ¡“distance” ¡means ¡a ¡gap ¡between ¡a ¡ fixed ¡point ¡which ¡is ¡a ¡ini+al ¡posi+on ¡of ¡ the ¡+p ¡of ¡FRPA ¡and ¡a ¡nearest ¡point ¡on ¡ LCFS ¡to ¡the ¡fixed ¡point. ¡ q A ¡ +me ¡ step ¡ of ¡ the ¡ signal ¡ is ¡ 24ms ¡ and ¡ the ¡ mean ¡ ra+o ¡ of ¡ distance ¡ change ¡ is ¡ 0.01m. ¡In ¡order ¡to ¡control ¡the ¡posi+on ¡ of ¡FRPA ¡in ¡real-‑+me, ¡the ¡speed ¡of ¡the ¡ FRPA ¡should ¡be ¡over ¡0.4167 ¡m/s. ¡ q The ¡ maximum ¡ speed ¡ of ¡ the ¡ FRPA ¡ is ¡ about ¡1.3m/s. ¡Thus, ¡the ¡FRPA ¡would ¡be ¡ controlled. ¡
Feedback loop for position control of FRPA 4 ¡ 5 ¡ 3 ¡ 2 ¡ 1 ¡ 1. The ¡input ¡part ¡signal ¡of ¡changing ¡minimum ¡distances ¡ 2. The ¡part ¡of ¡ini+al ¡posi+on ¡of ¡FRPA ¡ 3. The ¡part ¡of ¡desired ¡reference ¡gap ¡ 4. The ¡part ¡of ¡PID ¡controller ¡ 5. The ¡part ¡of ¡a ¡model ¡of ¡FRPA ¡actuator ¡
Validation of the actuator model q The ¡ red ¡ line ¡ is ¡ the ¡ experimental ¡ data ¡of ¡movement ¡of ¡the ¡FRPA. ¡ q There ¡are ¡two ¡op+ons ¡to ¡build ¡an ¡ theore+cal ¡ actuator ¡ model ¡ called ¡ transfer ¡func+on. ¡One ¡op+on ¡is ¡to ¡ reach ¡the ¡peak ¡value ¡more ¡quickly ¡ and ¡ the ¡ other ¡ is ¡ to ¡ trace ¡ the ¡ experimental ¡result ¡of ¡FRPA ¡more ¡ similarly. ¡ 1 q In ¡this ¡study, ¡we ¡used ¡the ¡case ¡of ¡ Transfer ¡func3on ¡: ¡ the ¡ laber(blue ¡ one) ¡ because ¡ we ¡ α S + 1 focus ¡on ¡ ¡mathema+cal ¡suitability. ¡ In ¡ other ¡ words, ¡ the ¡ model ¡ could ¡ be ¡proved ¡by ¡algebraic ¡method. ¡
Result Gap ¡[m] ¡ ¡ Opera+on ¡+me ¡[s] ¡ q For ¡α=0.1364, ¡Gain ¡values ¡ • Gain ¡of ¡P ¡: ¡2 ¡ ü Blue ¡line ¡: ¡gap ¡between ¡the ¡3p ¡of ¡FRPA ¡and ¡LCFS ¡ • Gain ¡of ¡I ¡: ¡ ¡1 ¡ ü Yellow ¡line ¡: ¡controlled ¡result ¡ • Gain ¡of ¡D ¡: ¡0.5 ¡ ü Red ¡line ¡: ¡error ¡value ¡
Conclusion q We ¡represent ¡that ¡our ¡feedback ¡loop ¡using ¡PID ¡controller ¡is ¡capable ¡of ¡keeping ¡ a ¡constant ¡distance ¡between ¡plasma ¡LCFS ¡and ¡the ¡+p ¡of ¡FRPA ¡during ¡plasma ¡ discharge. q According ¡ to ¡ 8021th ¡ experiment ¡ of ¡ 2013 ¡ KSTAR ¡ campaign, ¡ the ¡ gap ¡ between ¡ the ¡LCFS ¡and ¡the ¡vertex ¡of ¡FRPA ¡was ¡changed ¡with ¡a ¡mean ¡velocity ¡of ¡0.4167 ¡ m/s. ¡Since ¡the ¡maximum ¡velocity ¡of ¡FRPA ¡is ¡about ¡1.3 ¡m/s, ¡real-‑+me ¡control ¡ would ¡be ¡feasible. q A ¡theore+cal ¡actuator ¡model ¡of ¡FRPA ¡could ¡describe ¡the ¡experimental ¡data ¡of ¡ movement ¡of ¡FRPA ¡more ¡similarly ¡when ¡a ¡value ¡of ¡alpha ¡is ¡0.1364. ¡ q Through ¡suitable ¡tuning ¡of ¡PID ¡gains, ¡the ¡posi+on ¡of ¡probe ¡+p ¡could ¡keep ¡a ¡ constant ¡distance ¡with ¡LCFS
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.