Describing the spatial distribution of habitat trees based on line - PowerPoint PPT Presentation
data reconstruction results model Describing the spatial distribution of habitat trees based on line transect sampling and point pattern reconstruction H. Buerle A. Nothdurft Forest Research Institute Baden-Wrttemberg Workshop
data reconstruction results model Describing the spatial distribution of habitat trees based on line transect sampling and point pattern reconstruction H. Bäuerle A. Nothdurft Forest Research Institute Baden-Württemberg Workshop 03.-05.December 2009, University Lübeck point pattern reconstruction based on line transect sampling H. Bäuerle, A. Nothdurft
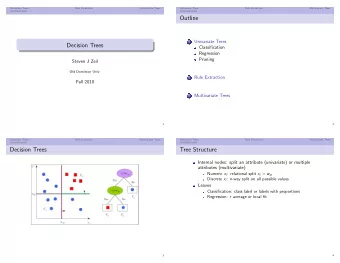
data reconstruction results model outline Data: Line transect samples as thinned point patterns 1 Method of reconstructing full point patterns in a 2 model-independent approach Evaluation of the reconstruction routine and analysis of the 3 obtained point patterns Describing the spatial habitat tree distribution by fitting a 4 Log-Gaussian Cox process model point pattern reconstruction based on line transect sampling H. Bäuerle, A. Nothdurft
data reconstruction results model empirical line transect sampling in the 378 ha study region Natura 2000 area 1.2 detection function g(x) 1.0 5428500 ● 0.8 ● ● ● ● 5428000 ● 0.6 ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● 0.4 ● ● ● ● 5427500 ● ● ● ● ● ● ● ● ● 0.2 ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● 5427000 ● ● ● 0.0 ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● 0 10 20 30 40 50 ● ● ● ● ● ● ● ● ● ● ● ● 5426500 ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● distance [m] ● ● ● ● ● ● ● ● ● ● ● ● ● ● 5426000 ● ● ●● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● detection probability using the ● ● ● 5425500 half-normal distribution function 3463000 3463500 3464000 3464500 3465000 3465500 � − x 2 � i p i = exp ˆ 2ˆ σ 2 Figure: Observed habitat trees from the 12 transects every 200 m point pattern reconstruction based on line transect sampling H. Bäuerle, A. Nothdurft
data reconstruction results model estimation of local densities in segments local density n j 5428500 ˆ � ● N j = 1 / ˆ p ji ● ● ● 5428000 ● ● i =1 ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● segments: j = 1 , . . . , 199 5427500 ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● observed trees: i = 1 , . . . , n j ● ● ● ● ● ● ● 5427000 ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● 5426500 ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● total number of habitat trees ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● 5426000 ● ● ● ● ● ●● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● � 199 j =1 ˆ 5425500 ● N j ˆ N = 2 · L · ω A 3463000 3463500 3464000 3464500 3465000 3465500 A: total area of the study site Figure: Estimating the local density L: total length of the survey lines in 1 ha segments ω : = maximum horizontal distance point pattern reconstruction based on line transect sampling H. Bäuerle, A. Nothdurft
data reconstruction results model reconstruction based on analysis of empirical cumulative distribution functions ECDFs spherical contact distribution function: H s ( r ) = 1 − P ( N ( b ( o, r )) = 0) for r ≥ 0 Probability that a disc b of radius r centered at any location o contains at least one tree. nearest-neighbor distance distribution function: D ( r ) = P o ( N ( b ( o, r ) / { o } ) > 0) for r ≥ 0 Probability of finding the nearest neighbour of a tree within a disc b of radius r centered at any tree location o . point pattern reconstruction based on line transect sampling H. Bäuerle, A. Nothdurft
data reconstruction results model reconstruction routine: an iterative optimisation procedure 1 The ECDFs for the original tree pattern are estimated. 2 New tree locations are generated to form the initial configuration together with the original locations. 3 To improve this configuration one tree in the current pattern is randomly generated or deleted. 4 For the new point pattern the ECDFs are estimated. 5 The contrast function C t is determined and the new state is accepted if C t < C t − 1 . Otherwise C t is rejected and the point pattern is reset to the previous configuration. 6 Step 3-6 are repeated until the maximum number of iterations 10 × Q is achieved, with Q the initial number of trees in A . point pattern reconstruction based on line transect sampling H. Bäuerle, A. Nothdurft
data reconstruction results model reconstruction routine: an iterative optimisation procedure Step 1 The ECDFs for the original tree pattern are estimated. ^ k ( r ) ^ sk ( r ) D H 1.0 1.0 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0.0 0.0 0 200 400 600 800 1000 0 500 1000 1500 r [m] r [m] Figure: Distances were measured to the k = 1 , . . . , 5 nearest trees, D k ( r ) and H s,k ( r ) point pattern reconstruction based on line transect sampling H. Bäuerle, A. Nothdurft
data reconstruction results model reconstruction routine: an iterative optimisation procedure 1 The ECDFs for the original tree pattern are estimated. 2 New tree locations are generated to form the initial configuration together with the original locations. 3 To improve this configuration one tree in the current pattern is randomly generated or deleted. 4 For the new point pattern the ECDFs are estimated. 5 The contrast function C t is determined and the new state is accepted if C t < C t − 1 . Otherwise C t is rejected and the point pattern is reset to the previous configuration. 6 Step 3-6 are repeated until the maximum number of iterations 10 × Q is achieved, with Q the initial number of trees in A . point pattern reconstruction based on line transect sampling H. Bäuerle, A. Nothdurft
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.