DC MOTORS 101 Servos, DC motors, Stepper motors, motor drivers - PDF document
1/20/14 DC MOTORS 101 Servos, DC motors, Stepper motors, motor drivers Agenda Start with PWM (Pulse Width Modulation) analog output feature of Arduinos equivalent to varying output voltage Use for dimming LEDs or
1/20/14 ¡ DC MOTORS 101 Servos, DC motors, Stepper motors, motor drivers Agenda ¨ Start with PWM (Pulse Width Modulation) ¤ “analog” output feature of Arduinos – equivalent to varying output voltage ¤ Use for dimming LEDs or speed control of DC motors ¨ DC motors ¤ Basic operation ¤ Driving with transistors ¤ Bi-directional drive with H-Bridge ¨ Stepper motors ¤ Unipolar and Bipolar versions ¤ Stepper driving circuits ¤ Example of Arduino-based stepper object library 1 ¡
1/20/14 ¡ Analog vs. Digital Input ¨ digitalRead(pin); ¤ Returns true/false, 1/0, off/on ¤ Great for switches ¨ analogRead(pin); ¤ Returns a range of values ¤ Actual voltage on the input should be between 0-5v ¤ Converted to 0-1023 discrete steps using ADC ¤ ADC is why the analog pins are special… Analog vs. Digital Output ¨ Digital Out = on/off, up/down, left/right, black/white, etc ¨ Analog Out = how hot, how fast, how bright, how loud, how grey? etc. ¨ As with digital output, we have current considerations, this time, how can we generate enough energy to control analog devices? ¨ Can we generate an analog voltage between 0-5v on the output? 2 ¡
1/20/14 ¡ ADC and DAC Arduino version is a 10-bit ADC Arduino has no built-in DAC… Pulse Width Modulation 3 ¡
1/20/14 ¡ Arduino PWM ¨ The Arduino has 6 PWM pins (3, 5, 6, 9, 10, 11) that can receive an analogWrite() command. ¤ analogWrite(pin, pulsewidth); ¨ 0 = 0 volts, 255 = 5V ¤ a number in between will provide a specific PWM signal. ¤ 128 will be seen as 2.5v, for example Knob Fade int knobPin = A0; // the analog input pin from the potentiometer int ledPin = 9; // pin for LED (a PWM pin) int val; // Variable to hold light sensor value void setup () { pinMode(ledPin, OUTPUT); // declare ledPin as output pinMode(knobPin, INPUT); // knobPin is an (analog) input } void loop () { val = analogRead(knobPin); //read the value from the pot val = map(val, 0, 1023, 100, 255); // map to reasonable values val = constrain(val, 0, 255); // Make sure it doesn’t go out of range analogWrite(ledPin, val); // write it to the LED using PWM } 4 ¡
1/20/14 ¡ Arduino PWM Alternative ¨ It is also possible to create a pwm signal by simply ‘pulsing’ a digital out pin very quickly: ¤ digitalWrite(pin, HIGH); delayMicroseconds(pulsewidth); // note: “Micro…!” digitalWrite(pin, LOW); delayMicroseconds(pulsewidth); ¨ Or, use a Motor Shield… Dimming Lights ¨ Incandescent blubs ¤ Vary the voltage, or use PWM ¨ LEDs ¤ Use PWM ¨ Fluorescents (compact or regular) ¤ In general you can’t dim them… ¤ There are a few “dimmable” compact fluorescents 5 ¡
1/20/14 ¡ Dimming Lights ¨ Fixed resistance and varying voltage = varying current ¤ V = IR, V/R = I ¨ Pay attention to the lamp ratings ¤ Remember P = IV ¨ For high current devices, you will need to electrically isolate the Arduino from the high current circuit. Activity: Arduino “flickering candle” ¨ Connect an LED to the Arduino on a PWM output pin ¤ Always remember current-limiting resistor… ¨ Write a program to make that LED “flicker” like a candle ¤ Chose between random brightness values ¤ Choose random times to change the value 6 ¡
1/20/14 ¡ Servos Also Use PWM ¨ From Tod Kurt, totbot.com Servos Also Use PWM ¨ From Tod Kurt, totbot.com 7 ¡
1/20/14 ¡ Servo Innards Servo Specs ¨ From Tod Kurt, totbot.com 8 ¡
1/20/14 ¡ Servo Control ¨ From Tod Kurt, totbot.com Servo Control ¨ From Tod Kurt, totbot.com 9 ¡
1/20/14 ¡ Programming Servo Motors ¨ The first thing to do when programming servos is work out the pulse range of the specific servo you are using. ¤ With the arduino, this can be between 0.5 and 2.5 ms. ¤ Servos also need ‘refresh’ time between pulses -- usually 20ms ¨ The frequency of the Arduino’s built-in pwm pins is too high for servos, so we have to use the pseudo-pwm method instead: digitalWrite(servoPin, HIGH); delayMicroseconds(pulse); digitalWrite(servoPin, LOW); delayMicroseconds(refreshTime); ¨ Or alternatively, use the Arduino servo library ¨ Black = gnd ¨ Red = +5v ¨ Yellow = signal Servo Example Program #include <Servo.h> // include the built-in servo library Servo myservo; // create a servo object to control the servo (one per servo) int pos = 0; // variable to store the servo position void setup() { myservo.attach(9); // attach servo control to pin 9 } void loop() { for (pos = 0; pos < 180; pos++) { // go from 0 to 180 degrees myservo.write(pos); // move the servo delay(20);l // give it time to get there } for (pos = 180; pos>=1; pos--) { // wave backwards myservo.write(pos); delay(20); } } 10 ¡
1/20/14 ¡ Servo Functions ¨ Servo is a class ¤ Servo myservo; // creates an instance of that class ¨ myservo.attach(pin); ¤ attach to an output pin (doesn’t need to be PWM pin!) ¤ Servo library can control up to 12 servos on our boards ¤ but a side effect is that it disables the PWM on pins 9 and 10 ¨ myservo.write(pos); ¤ moves servo – pos ranges from 0-180 ¨ myservo.read(); ¤ returns the current position of the servo (0-180) Servo Object (class instance) .write 0 to 180 Pin 9 Name: myservo .attach Pin number position: 67 deg Attached to: pin 9 return current .read deg position 11 ¡
1/20/14 ¡ Moving on… ¨ Write a program to control the position of the servo from a pot, or from a photocell ¤ remember analogRead(); values are from 0-1023 ¤ measure the range of values coming out of the photocell first? ¤ use Serial.print(val); for example ¤ use map(val, in1, in2, 0, 180); to map in1-in2 values to 0-180 ¤ Can also use constrain(val, 0, 180); Side Note - Power ¨ Servos can consume a bit of power ¤ We need to make sure that we don’t draw so much power out of the Arduino that it fizzles ¤ If you drive more than a couple servos, you probably should put the servo power pins on a separate power supply from the Arduino ¤ Use a wall-wart 5v DC supply, for example 12 ¡
1/20/14 ¡ Moving on: Electromagnetism ¨ Permanent magnets have magnetic fields that flow from North to South poles of the magnet Electromagnets ¨ Current flowing through a conductor creates a magnetic field ¤ Right hand rule: Point your thumb in direction of current, and your fingers curl in the direction of the magnetic field 13 ¡
1/20/14 ¡ Electromagnets ¨ Current flowing through a coiled conductor creates a magnetic field ¤ Right hand rule: Point your thumb in direction of current, and your fingers curl in the direction of the magnetic field ¤ Alternately, curl your fingers in the direction of the current, your thumb points to North magnetic pole Electromagnets ¨ Current flowing through a coiled conductor creates a magnetic field ¤ Important implication: When the current it reversed, so is the magnetic field! 14 ¡
1/20/14 ¡ Aside: Current dir vs. Carrier dir ¨ Current (amps) flows from positive to negative ¤ “positive current” ¨ BUT – the charge carriers are (usually) electrons ¤ Electrons have negative charge ¤ So – the electrons move from negative to positive ¨ Charge carriers move in opposite direction from current! ¤ Yes, it’s confusing… ¤ We’ll tackle this again talking about transistors! Electromagnets and Motors ¨ Motors use the reversing feature of an electromagnet, and magnetic attraction ¤ Permanent magnets on one side, electromagnets that can switch polarity on the other 15 ¡
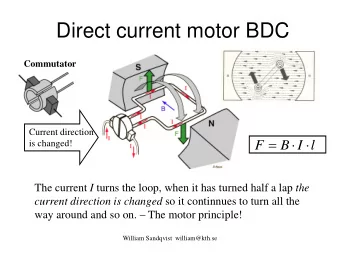
1/20/14 ¡ Basic DC Motor Behavior ¨ Electrical energy -> mechanical motion ¨ Motors have fixed parts (stator) and moving parts (rotor) ¨ A DC motor consists of: ¤ Commutator n Rotary switch n Reverses current twice every cycle ¤ Electromagnetic coils n Opposing polarities switched by commutator n Inertia causes them to continue rotating at the moment of polarity switching ¤ Fixed Magnets n Opposing polarities Basic DC Motor Behavior ¨ Electrical energy -> mechanical motion ¨ Motors have fixed parts (stator) and moving parts (rotor) ¨ A DC motor consists of: ¤ Commutator n Rotary switch n Reverses current twice every cycle ¤ Electromagnetic coils n Opposing polarities switched by commutator n Inertia causes them to continue rotating at the moment of polarity switching ¤ Fixed Magnets n Opposing polarities 16 ¡
Recommend

![DC Motors and H-Bridges Presented By: Sean Huang, Daniel Simon, and Scott Smith [1] [2] 1](https://c.sambuz.com/861338/dc-motors-and-h-bridges-s.webp)






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.