Computer Simulation and Applications 9 September 2008 todays menu: - PowerPoint PPT Presentation
Computer Simulation and Applications 9 September 2008 todays menu: extremely simple models Models to study effects of winds/storms China Central Television, Beijing There are also models to study effects of earth quakes on this
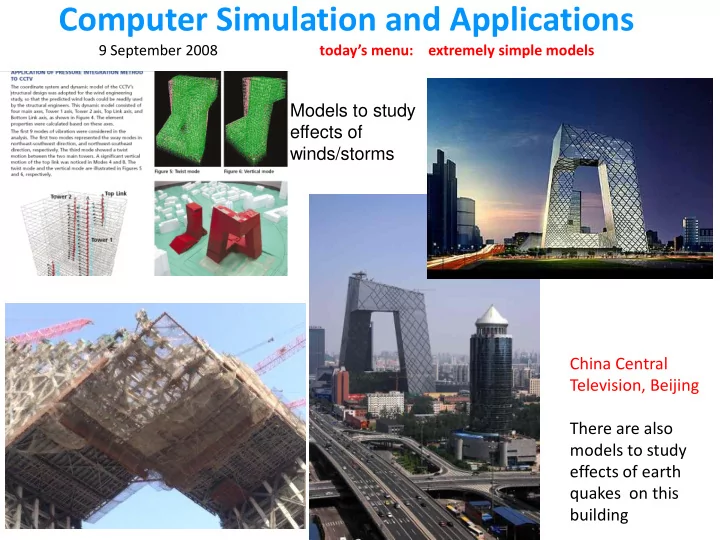
Computer Simulation and Applications 9 September 2008 today’s menu: extremely simple models Models to study effects of winds/storms China Central Television, Beijing There are also models to study effects of earth quakes on this building
Practice yourself, for heaven’s sake, in little things, and thence proceed to greater. – Epictetus (Discourses IV, i) We will obey this adagium today. But don’t fret: what we are going to study today is rather indicative of the more general situations! I will try to convey the ideas and intuition
predicitibility and reproducibility in science Poincaré in ‘Science and Method’ (1903): “If we knew exactly the laws of nature and the situation of the universe at the initial moment, we could predict exactly the situation of that same universe at a succeeding moment. But even if it were the case that the natural laws had no longer any secret for us, we would still only know the initial situation approximately. If that enabled us to predict the succeeding situation with the same approximation, that is all we require, and we should say that the phenomenon had been predicted, that it is governed by laws. But it is not always so; it may happen that small differences in the initial conditions produce very great ones in the final phenomena. A small error in the former will produce an enormous error in the latter. Prediction becomes impossible, and we have the fortuitous phenomenon. “
Dynamical Systems • Let us consider the following utterly simple function: f(x) = 2x • This can be viewed as a model for bacteria growth: the rule expresses the fact that the population doubles every hour • If the culture has 10,000 bacteria, then after an hour there will be 20,000 bacteria, after two hours 40,000 bacteria etc
Dynamical Systems • A dynamical system consists of a set of possible states, together with a rule that determines the present states in terms of past states. • In previous slide, we discussed a simple dynamical systems whose states are population levels, that change with time under the rule: here the variable n x n+1 = f(x n ) = 2 x n x n stands for time and designates the population at time n.
Discussion of motivation for iterative maps x n+1 = f(x n ) a) Discretization of differential equations b) Poincaré map c) Functions seen as models for describing population levels which change at discrete times (as in our example of bacteria growth) d) Newton-Raphson method for solving equations f(x) =0 e) And many more ....
(Deterministic) Dynamical Systems • We require rule to be deterministic , i.e. we can determine the present state (population, for example) uniquely from the past states. • No randomness! • Possible model for the price of gold as function of time would be: predict today’s price to be yesterday’s plus or minus 1 euro, with the two possibilities equally likely. • Instead of a dynamical system, this model would be called random or stochastic process
Dynamical Systems • Two types of dynamical systems: • discrete time dynamical system – Takes current state as input and updates the situation by producing a new state as output – State is whatever information which is needed in order to be able to apply the rule – aka(also known as): MAP • continuous time dynamical system – Essentially the limit of discrete systems with smaller and smaller updating times – Governing rule a set of differential equations
Aside: Recall why we study models • Models suggest how real-world processes behave • Every model is at best an idealization. The goal is to capture some feature of the physical process/system • Today: we want to capture the patterns of points on an orbit. We will find: sometimes simple, sometimes quite complicated (´chaotic´) even for simple maps
Aside: Recall why we study models • The question to ask about a model is whether the behavior it exhibits is because of its simplications or whether it captures the behavior despite the simplifications • Modeling reality too closely may result in an intractable model about which little can be learned • Model building is an art (and a ´science´)
Aside: Recall why we study models • Today we try to get a handle on possible behaviors of maps by considering the simplest ones
one-dimensional Maps • Recall we want to: Predict how a system will evolve as time progresses Define: f k ( x 0 ) := f ( f (f ( x 0 ))), • Our first example, the population evolves by k times single rule f(x) = 2x. The output of the rule is used as input value for the next hour, and the same doubling rule is applied again • The evolution of this system is described by the composition of the function f : given x 0 (initial value) we want to know for large k: k times x 0 , f ( x 0 ), f (f ( x 0 )), , f ( f (f ( x 0 ))), Orbit of x 0
one-dimensional Maps • Clearly for the example f(x) = 2x the population will grow without bound (exponential growth) • Malthus (1798): limits to growth • Real habitats have finite resources
The (family) Logistic Map(s) Improved model: f(x) = a x(1-x) introduced by Verhulst (1845) to simulate the growth in a closed area: The number of species x n+1 in the year n+1 is proportional to the number in the previous year x n and to the remaining area, which is diminished, propertionally, to x n where the parameter a depends on the fertility, the actual area of living etc. Name: LOGISTIC GROWTH MODEL • (Aside: for our bacteria example x is measured in millions)
The (family) Logistic Map(s) Let us focus on the case where the paramater is 2: f(x) = 2 x(1-x) k f(x)=2x f(x)=2x(1-x) f(x)=2x(1-x) 0 0,01 0,01 0,9 1 0,02 0,0198 0,18 2 0,04 0,03881592 0,2952 3 0,08 0,074618489 0,41611392 4 0,16 0,13810114 0,485926251 5 0,32 0,23805843 0,499603859 6 0,64 0,362773228 0,499999686 7 1,28 0,462337626 0,5 8 2,56 0,497163091 0,5 9 5,12 0,499983904 0,5 10 10,24 0,499999999 0,5 11 20,48 0,5 0,5 12 40,96 0,5 0,5 Steady state
Definitions • A function whose domain(input) and range(output space) are the same is called a map. • Let x be a point and let f be a map. The orbit of x under f is the set of points { f 0 (x) = x, f 1 (x) = f(x), f 2 (x) = f ( f(x) ), ... , f k (x) = f( f k-1 (x) ), ... }. • The starting point x for the orbit is called the initial value of the orbit. • A point p is a fixed point of the map f, if f(p)=p
Example • The function from the real line f(x) = 2 x(1-x) to the real line is a map. Considered as from [0,1] to [0, 1] is another map. • The orbit of x=0.01 under f is {0.01, 0.0198, 0.0388,...} • The fixed points of f are x=0 and x=1/2.
Graphically computing orbits: Cobweb Plots f(x) = 2x etcetera The line y=x, the diagonal, is an auxiliary “hulplijn” x 0 = 0.375 WHY do you get orbit? In words: Go from x o to the graph of the function, from the graph to the diagonal, from the diagonal to the graph, etc., etc.
Graphically computing orbits: Cobweb Plots (x o , x 1 ) x 0 = 0.375
Graphically computing orbits: Cobweb Plots (x o , x 1 ) ( ? , x 1 ) x 0 = 0.375
Graphically computing orbits: Cobweb Plots (x o , x 1 ) ( ? , x 1 ) = ( x 1 , x 1 ) x 0 = 0.375
Graphically computing orbits: Cobweb Plots (x o , x 1 ) (x 1 , x 1 ) x 0 = 0.375
Graphically computing orbits: Cobweb Plots (x o , x 1 ) (x 1 , x 1 ) x 0 = 0.375 ( ? , 0)=(x 1 , 0)
Graphically computing orbits: Cobweb Plots (x 1 , x 2 ) (x o , x 1 ) (x 1 , x 1 ) x 0 = 0.375
Graphically computing orbits: Cobweb Plots (x 1 , x 2 ) (x o , x 1 ) ( ? , x 2 ) (x 1 , x 1 ) x 0 = 0.375
Graphically computing orbits: Cobweb Plots (x 1 , x 2 ) (x o , x 1 ) ( ? , x 2 ) =( x 2 , x 2 ) (x 1 , x 1 ) x 0 = 0.375
Graphically computing orbits: Cobweb Plots (x 1 , x 2 ) (x o , x 1 ) (x 2 , x 2 ) (x 1 , x 1 ) x 0 = 0.375
Graphically computing orbits: Cobweb Plots (x 1 , x 2 ) (x o , x 1 ) (x 2 , x 2 ) (x 1 , x 1 ) x 0 = 0.375 (x 2 , 0)
Graphically computing orbits: Cobweb Plots (x 2 , x 3 ) (x 1 , x 2 ) (x o , x 1 ) (x 2 , x 2 ) (x 1 , x 1 ) x 0 = 0.375
Graphically computing orbits: Cobweb Plots x 0 = 0.077 f(x) = 2x(1-x)
Plot of f(x) = (3 ¢ x – x 3.0 ) / 2.0 Cobweb for initial values = 1.8 and 1.6
f(x)=1.0-1.4 x 2 x 4 x 1 x 2 x o x 1 x 3 x 2
Stability of Fixed Points • Very important point: if a fixed point (or periodic point – defined later) is to be relevant for observations in the dyn. sys. described by f, then we need to know where it persists under small perturbations • Why small perturbations?
Stability of Fixed Points • We might consider different kinds of perturbation – Perturbation of the initial point: “do systems in nearby initial points evolve similarly? – Perturbations of the function f: “f is only approximately known” – Stochastic perturbations: “The true equation is not x n+1 = f(x n ) but x n+1 = f(x n )+r(x n ) , where r(x) is a small variation of f(x n ) with some a priori probability
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.