Codimension-two points The 1:2 mode interaction System with O (2) - PowerPoint PPT Presentation
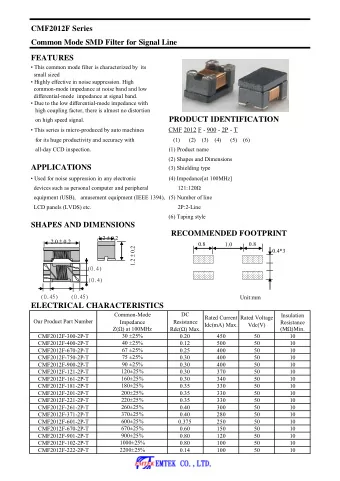
Laurette TUCKERMAN laurette@pmmh.espci.fr Codimension-two points The 1:2 mode interaction System with O (2) symmetry with competing wavenumbers m = 1 and m = 2 Solutions approximated as: u ( , t ) = z 1 ( t ) e i + z 2 ( t ) e 2 i + z 1
Laurette TUCKERMAN laurette@pmmh.espci.fr Codimension-two points
The 1:2 mode interaction System with O (2) symmetry with competing wavenumbers m = 1 and m = 2 Solutions approximated as: u ( θ, t ) = z 1 ( t ) e iθ + z 2 ( t ) e 2 iθ + ¯ z 1 ( t ) e − iθ + ¯ z 2 ( t ) e − 2 iθ with z 1 ( t ) = x 1 ( t ) + iy 1 ( t ) = r 1 ( t ) e iφ 1 ( t ) , z 2 ( t ) = x 2 ( t ) + iy 2 ( t ) = r 2 ( t ) e iφ 2 ( t ) O (2) generated by rotation by θ 0 and reflection about θ = 0 : S θ 0 ( z 1 , z 2 ) = ( e iθ 0 z 1 , e 2 iθ 0 z 2 ) κ ( z 1 , z 2 ) = ( ¯ z 1 , ¯ z 2 )
Define � z 1 � F � ¯ � z 1 z 2 − z 2 z 2 → 1 Show that F is equivariant with respect to O (2) : � z 1 � F � ¯ � κ � z 1 ¯ � z 1 z 2 z 2 − z 2 z 12 z 2 → → − ¯ 1 � z 1 � κ � ¯ � F � z 1 ¯ � z 1 z 2 z 12 z 2 → z 2 ¯ → − ¯ � z 1 � F � ¯ � S θ 0 � e iθ 0 ¯ � z 1 z 2 z 1 z 2 − z 2 − e 2 iθ 0 z 2 z 2 → → 1 1 � z 1 � S θ 0 � e iθ 0 z 1 � F � e − iθ 0 ¯ z 1 e 2 iθ 0 z 2 � e 2 iθ 0 z 2 − e 2 iθ 0 z 2 z 2 → → 1 Essentially 1 + 1 = 2 and 2 − 1 = 1 Dynamical system for evolution of z 1 , z 2 is: µ 1 − α 1 | z 1 | 2 − β 1 | z 2 | 2 � � z 1 = ¯ ˙ z 1 z 2 + z 1 µ 2 − β 2 | z 1 | 2 − α 2 | z 2 | 2 � z 2 = − z 2 � ˙ 1 + z 2
Steady states (Phase is arbitrary: z → x ) µ 1 − α 1 x 2 1 − β 1 x 2 � � �� 0 = x 1 x 2 + 2 0 = − x 2 µ 2 − β 2 x 2 1 − α 2 x 2 � � 1 + x 2 2 Trivial state: x 1 = x 2 = 0 Mode-two (“pure mode”) state: x 1 = 0 , x 2 � = 0 : x 2 2 = µ 2 /α 2 If x 1 � = 0 then x 2 � = 0 ! Instead, have “mixed-mode state”: µ 1 − α 1 x 2 1 − β 1 x 2 � � 0 = x 2 + 2 0 = − x 2 µ 2 − β 2 x 2 1 − α 2 x 2 � � 1 + x 2 2 (intersection of two conic sections)
Stability Jacobian in Cartesian coordinates (even if y = 0 , Jacobian must include y ) x 2 + µ 1 − α 1 ( r 2 1 + 2 x 2 1 ) − β 1 r 2 y 2 − α 1 2 x 1 y 1 x 1 − β 1 2 x 1 x 2 y 1 − β 1 2 x 1 y 2 2 − x 2 + µ 1 − α 1 ( r 2 1 + 2 y 2 1 ) − β 1 r 2 y 2 + µ 1 − α 1 2 x 1 y 1 − y 1 − β 1 2 y 1 x 2 x 1 − β 1 2 x 2 y 1 2 µ 2 − β 2 r 2 1 − α 2 ( r 2 2 + 2 x 2 ± 2 x 1 − β 2 2 x 2 x 1 ∓ 2 y 1 + − β 2 2 x 2 y 1 2 ) − α 2 2 x 2 y y µ 2 − β 2 r 2 1 − α 2 ( r 2 2 + 2 y 2 ± 2 y 1 + µ 2 − β 2 2 x 1 y 2 ± 2 y 1 y 2 α 2 2 x 2 y 2 2 ) Trivial state: µ 1 0 0 0 0 µ 1 0 0 J = 0 0 µ 2 0 0 0 0 µ 2 Two 2D eigenspaces. Circle pitchforks at µ 1 = 0 and µ 2 = 0
� Mode-two state: x 1 = y 1 = y 2 = 0 , x 2 = ± µ 2 /α 2 x 2 + µ 1 − β 1 x 2 0 0 0 2 − x 2 + µ 1 − β 1 x 2 µ 1 0 0 2 J = µ 2 − 3 α 2 x 2 0 0 0 2 µ 2 − α 2 x 2 0 0 0 2 � α 2 + µ 1 − β 1 µ 2 µ 2 ± 0 0 α 2 � µ 2 α 2 + µ 1 − β 1 µ 2 0 ∓ 0 0 = α 2 0 0 − 2 µ 2 0 0 0 0 0 Eigenvalues − 2 µ 2 and 0 are usual results of circle pitchfork. Other two eigenvalues concern instability to ( x 1 , y 1 ) . They are different because mode-two state has a phase (no CP from mode-two). Mixed-mode branch bifurcates from trivial state at µ 1 = 0 and from mode-two branch at µ 2 � µ 2 µ 1 − β 1 ± = 0 α 2 α 2
Polar representation z 1 ( t ) = r 1 ( t ) e iφ 1 ( t ) , z 2 ( t ) = r 2 ( t ) e iφ 2 ( t ) Evolution equations: r 1 + ir 1 ˙ φ 1 ) e iφ 1 = r 1 e − iφ 1 r 2 e iφ 2 + r 1 e iφ 1 � µ 1 − α 1 r 2 1 − β 1 r 2 � ( ˙ 2 φ 2 ) e iφ 2 = − r 1 e iφ 1 r 1 e iφ 1 + r 2 e iφ 2 � r 2 + ir 2 ˙ µ 2 − β 2 r 2 1 − α 2 r 2 � ( ˙ 2 Dividing equations by e iφ 1 and by e iφ 2 : φ 1 = r 1 r 2 e i ( φ 2 − 2 φ 1 ) + r 1 r 1 + ir 1 ˙ µ 1 − α 1 r 2 1 − β 1 r 2 � � ˙ 2 1 e i (2 φ 1 − φ 2 ) + r 2 r 2 + ir 2 ˙ φ 2 = − r 2 µ 2 − β 2 r 2 1 − α 2 r 2 � � ˙ 2 Separating real and imaginary parts and dividing imaginary parts by r j � = 0 : µ 1 − α 1 r 2 1 − β 1 r 2 � � r 1 = r 1 r 2 cos( φ 2 − 2 φ 1 ) + r 1 ˙ 2 ˙ φ 1 = r 2 sin( φ 2 − 2 φ 1 ) r 2 = − r 2 µ 2 − β 2 r 2 1 − α 2 r 2 � � ˙ 1 cos(2 φ 1 − φ 2 ) + r 2 2 ˙ φ 2 = − ( r 2 1 /r 2 ) sin(2 φ 1 − φ 2 )
Substitute Φ ≡ 2 φ 1 − φ 2 : r 2 cos Φ + µ 1 − α 1 r 2 1 − β 1 r 2 � � r 1 = r 1 ˙ 2 r 2 = − r 2 µ 2 − β 2 r 2 1 − α 2 r 2 � � ˙ 1 cos Φ + r 2 2 ˙ � φ 1 − r 2 sin Φ ⇒ ˙ Φ = − (2 r 2 − r 2 = = 1 /r 2 ) sin Φ ˙ − ( r 2 1 /r 2 ) sin Φ φ 2 r 2 = ˙ Suppose ˙ r 1 = ˙ Φ = 0 , but r 1 , r 2 � = 0 0 = r 2 cos Φ + µ 1 − α 1 r 2 1 − β 1 r 2 2 0 = − r 2 µ 2 − β 2 r 2 1 − α 2 r 2 � � 1 cos Φ + r 2 2 0 = (2 r 2 2 − r 2 1 ) sin Φ Mixed modes ⇒ ˙ φ 1 = ˙ Φ = 0 , π = ⇒ sin Φ = 0 = φ 2 = 0 = ⇒ steady states: 0 = ± r 2 + µ 1 − α 1 r 2 1 − β 1 r 2 2 0 = ∓ r 2 µ 2 − β 2 r 2 1 − α 2 r 2 � � 1 + r 2 2
Traveling Waves ˙ Φ = − (2 r 2 − r 2 0 = 1 /r 2 ) sin Φ ⇒ 0 = 2 r 2 2 − r 2 ⇒ r 2 1 = 2 r 2 sin Φ � = 0 = 1 = 2 Φ ≡ 2 ˙ ˙ φ 1 − ˙ 0 = φ 2 Definition: u ( θ, t ) = u ( θ − ct, 0) u ( θ, t ) = r 1 ( t ) e i ( φ 1 ( t )+ θ ) + r 2 ( t ) e i ( φ 2 ( t )+2 θ ) + complex conjugate u ( θ − ct, 0) = r 1 (0) e i ( φ 1 (0)+ θ − ct ) + r 2 (0) e i ( φ 2 (0)+2( θ − ct )) + complex conjugate � r 1 ( t ) = r 1 (0) and φ 1 ( t ) = φ 1 (0) − ct = ⇒ r 2 ( t ) = r 2 (0) and φ 2 ( t ) = φ 2 (0) − 2 ct = ⇒ 2 φ 1 ( t ) − φ 2 ( t ) = 2 φ 1 (0) − φ 2 (0) = ⇒ Φ( t ) = Φ(0)
0 = 2 r 2 2 − r 2 ⇒ r 2 1 = 2 r 2 = 1 2 r 1 = r 2 cos Φ + µ 1 − α 1 2 r 2 2 − β 1 r 2 0 = ˙ 2 r 2 = − 2 r 2 µ 2 − β 2 2 r 2 2 − α 2 r 2 � � 0 = ˙ 2 cos Φ + r 2 2 Add 2 × blue equation to ( 1 /r 2 ) × green equation 0 = 2 µ 1 + µ 2 − (4 α 1 + 2 β 1 + 2 β 2 + α 2 ) r 2 2 2 µ 1 + µ 2 r 2 2 = 4 α 1 + 2 β 1 + 2 β 2 + α 2 Can also obtain: µ 1 (2 α 2 + β 2 ) − µ 2 (2 α 1 + β 1 ) cos Φ = [(2 µ 1 + µ 2 )(4 α 1 + 2 β 1 + 2 α 2 + β 2 )] 1 / 2 Traveling waves bifurcate from mixed mode branch when | cos Φ | = 1 ⇐ ⇒ ( µ 1 (2 α 2 + β 2 ) − µ 2 (2 α 1 + β 1 )) 2 = (2 µ 1 + µ 2 )(4 α 1 + 2 β 1 + 2 α 2 + β 2 )
Time-dependent states • Traveling waves via Hopf bif from mixed-mode branch • Modulated waves via secondary Hopf bif from traveling waves • Heteroclinic orbit connects two opposite-phase mode-two sad- dles with eigenvalues − λ − < 0 < λ + Can prove orbit is stable if λ − > λ + , i.e. if contraction more important than expansion � µ 2 � µ 2 � µ 2 � µ 2 − µ 1 − β 1 − > µ 1 − β 1 + α 2 α 2 α 2 α 2 µ 2 ⇐ ⇒ β 1 > µ 1 α 2
Takens-Bogdanov normal form Meeting of Hopf and steady bifurcations x = y ˙ y = − µ 1 x + µ 2 y − x 3 − x 2 y ˙ Steady states: 0 = y ⇒ x = ±√− µ 1 0 = − µ 1 x − x 3 = Jacobian: � � 0 1 J = µ 1 − 3 x 2 − 2 xy µ 2 − x 2 � 0 �� µ 2 � ⇒ λ = µ 2 1 � 2 J (0 , 0) = = 2 ± − µ 1 µ 1 µ 2 2
J is Jordan block at codimension-two point µ 1 = µ 2 = 0 Hopf bifurcation at µ 2 = 0 for µ 1 > 0 Pitchfork bifurcation at µ 1 = 0 Real eigenvalues coalesce to form complex conjugate pair At collision, imaginary part is zero At a nearby Hopf bifurcation, frequency is near zero = ⇒ period is near infinity
Heteroclinic cycles in the French washing machine Caroline Nore LIMSI-CNRS, France Laurette Tuckerman Olivier Daube Shihe Xin θ
The French Washing Machine (von Karman flow) Symmetry Group: Rotations in θ and Combined reflection in z and θ Rot/Ref don't commute ⇒ Ο(2) Douady, Brachet, Couder, Fauve et al Le Gal et al, Rabaud et al, Daviaud et al. Gelfgat et al, Lopez & Marques et al
Numerical Methods Time-integration code for Navier-Stokes eqns by Daube Spatial: finite differences in (r,z), Fourier in θ Temporal: 2 nd order backward difference formula Adaptations: -Steady state solving via Newton for axisymmetric flows -Linear stability about axisymmetric and 3D flows
Linear Stability of Basic Axisymmetric Flow z=1/3 z=0 z= − 1/3 m=2 m=1 pure mode mixed mode Re=410 Re=355
Bifurcation Diagram for 1:2 mode interaction Normal Form quadratic terms Armbruster, Guckenheimer & Holmes; Proctor & Jones (1988)
Mixed Mode (from m=1 eigenvector)
Pure Mode (from m=2 eigenvector)
Travelling Waves (Re=415) TW = Mixed Mode + Eigenvector Reflection-Symmetric Antisymmetric
Two types of heteroclinic cycles 4 plateaus 2 plateaus
Heteroclinic Cycle (Re=430) a b c d f e g h
Linear stability analysis about nonaxisymmetric flows Eigenvalues about pure mode Eigenvalues about mixed mode
Conclusion counter-rotating von Karman flow with diameter=height is almost perfect realisation of 1:2 mode interaction steady states (mixed and pure modes) travelling waves robust heteroclinic cycles of two kinds possible Kelvin-Helmholtz instability mechanism
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.