
Chapter 2 Reference Frames and Roto-translations Before we start - PDF document
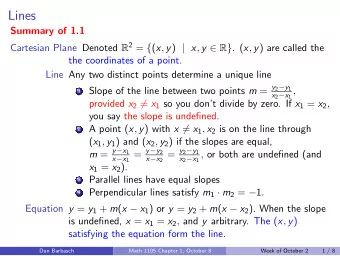
Chapter 2 Reference Frames and Roto-translations Before we start to the study the kinematics and dynamics of rigid bodies and multi- body systems, it is appropriate to recall some geometrical concepts used to describe the basic quantities and
Chapter 2 Reference Frames and Roto-translations Before we start to the study the kinematics and dynamics of rigid bodies and multi- body systems, it is appropriate to recall some geometrical concepts used to describe the basic quantities and the associate transformations transformations that charac- terize the motion of a rigid body in space. We will start with a formal definition of reference frames and then we will introduce the translation, rotation and roto-translation operators, that are essential for the study of motion of rigid bodies. 2.1 Tridimensional space For simplicity, from now on, we will assume to be confined in a tridimensional world, except when we will study two-dimensional problem, as in planar motion or in robotic computer vision; consequently vectors will be described as elements of the 3D space R 3 , or E 3 if the Euclidean norm is implicit. With no intention to raise philosophical questions, we can assume that the physical world around us, including the geometric entities we perceive, exist independently of any reference frame. On the contrary, for modelling purposes, it is very often nec- essary to express vectors with respect to one or more reference frames; we can say that fixing a coordinate system and the related reference frame “gives substance” to vectors: these can now be compared and measured relative to a common ruler. Moreover, suitable operations acting on vectors allow to determine, represents and measure geometric entities as angles, distances, orthogonality, projections, or phys- ical quantities, as fields, powers, angular and linear velocities, etc. In principle, there is a difference between a reference frame and a coordinate system : the latter indicates the abstract structure used to define vectors, while the former 9
10 Basilio Bona - Dynamic Modelling indicates a specific way to define the parameters that characterize the vectors; ex- amples of coordinate systems can be the cylindrical, the spherical or the rectangular (cartesian) coordinate system, while examples of (cartesian) reference frames are Earth centered inertial frame, the International Celestial reference frame (ICRF) and others [25]. In the following we will use indifferently the two terms to indicate a cartesian reference coordinate system, as specified in the following paragraphs. 2.2 Reference frames A reference frame is defined by the symbol R ( O, i , j , k ) or R for short, where O is a particular point in space, called the origin , and i , j , k are three unit normal vectors, defining the metric properties of the space. Since it creates a loophole to define vectors in relation to a reference frame that is essentially built on vectors, it is necessary to understand how to construct R without making use of vectors and operations not yet defined. The only things we need in order to build a reference frame is the concept of square angles, i.e., orthogonality between lines, and three geometric directed segments or directed numbers − A ′ A, − − → B ′ B , and − − → − → C ′ C of equal length, that have the function of rulers of unit length in the 3D space. That of directed segments is a basic concept described in any introductory physics textbook, and has been briefly recalled in Appendix A.3. Having fixed the origin in O , we place the directed segments so that the three starting points A ′ , B ′ , and C ′ coincide with O . Furthermore, the three segments must not be aligned with each other or lying all on the same plane. Usually these conditions are sufficient to characterize the reference frame, but, in order to preserve the orthogonal angles and orthogonal projections when using vector products, we orient the three segments at angles of π/ 2 with respect to each other. These constraints allow only two possibilities, that are illustrated in Figure 1a) and b). The reference system in Figure 1a) is called a right-handed reference frame , while that of Figure 1b) is a left-handed reference frame . These names derive from the right-hand rule or the left-hand rule, illustrated in Figure ?? The most commonly used reference frame (from now on simply called RHF ) is the first one, and we will tacitly adopt this convention in the rest of the book. In Figure 2.1, the three directed segments have been identified with the symbols i = − → j = − − → k = − → OA OB OC (2.1) The set { i , j , k } is called base vector set , and i , j , k are called base or basis vectors. We also say that { i , j , k } form a right or left orthonormal basis in R 3 . We are now able to use R ( O, i , j , k ) to characterize any other vector in R 3 .
11 Basilio Bona - Dynamic Modelling Figure 2.1: a) right orthonormal reference frame; b) left orthonormal reference frame. Given a reference frame R , a vector v ∈ R 3 is represented by three components, each one being the orthogonal projection of the directed segment on the three elements i , j and k . This can be written as the linear combination of the base elements, and give origin to the well-known algebraic definition of vectors: v = v 1 i + v 2 j + v 3 k (2.2) where v i ∈ R , i = 1 , 2 , 3, are the three vector components with respect to R . In order to be able to define the values of v i , it is necessary to introduce a binary operation between two vectors a and b , called the scalar vector product or dot product , and defined as: a · b = a 1 b 1 + a 2 b 2 + a 3 b 3 = b · a (2.3) We have defined this product and its properties in Appendix A.4.1; for the moment, relation (2.3) is sufficient for our aims. The three components v i are defined as: v 1 = i · v v 2 = j · v (2.4) v 3 = k · v
12 Basilio Bona - Dynamic Modelling As i , j , k are vectors themselves, each one can be expressed according to (2.2): i = i 1 i + i 2 j + i 3 k j = j 1 i + j 2 j + j 3 k (2.5) k = k 1 i + k 2 j + k 3 k Since i is orthogonal to j and k , and has unit length, its first component must be equal to one, while the other two must be zero; the same argument holds for j and k as well. Hence, if we define 1 0 0 , e 1 = 0 e 2 = 1 e 3 = 0 (2.6) 0 0 1 it follows that i = e 1 j = e 2 k = e 3 (2.7) Therefore the representation of the reference frame R into itself can be given by the identity matrix 1 0 0 [ ] [ ] . i j k = e 1 e 2 e 3 = I = 0 1 0 (2.8) 0 0 1 According to (2.2), each vector can be represented by a column of real components that we call a column vector : v 1 v 1 v 1 [ ] = I = v = i j k v 2 v 2 v 2 (2.9) v 3 v 3 v 3 In (2.9) we have implicitly assumed to know how to use the matrix notation and to understand the row by column product rule. COMPLETARE Although notation (2.8) may appear pedantic and superfluous, we will see in Section ?? that it is possible to represent a reference frame R 2 with respect to another reference frame R 1 replacing the identity matrix I with a square orthogonal matrix R , having the specific geometric meaning properties, described in Section ?? ; COMPLETARE Relation (2.9) is the simplest form of a more general relation v 1 = Rv 2 that provides the representation in R 1 of a vector v 2 with components given in R 2 . To indicate the single components of a vector v one can adopt numerical k = 1 , 2 , 3 or literal k ∈ { x, y, z } indexes. While the literal indexes have an immediate meaning,
13 Basilio Bona - Dynamic Modelling they are more difficult to use when computer algorithms or mathematical formulas are considered; for example, the norm of a vector can be written as follows ∑ ∥ v ∥ 2 = v 2 k k ∈{ x,y,z } or 3 ∑ ∥ v ∥ 2 = v 2 k k =1 The second one is much more immediate, and except that some particular case, the numerical indexes will be adopted throughout these notes.li. Often we omit to specify the origin of a reference frame that is simply indicated as R ( i , j , k ). Other times we use an index to specify a particular reference frame; for example we use the symbol R m ( i m , j m , k m ) to indicate a “local” frame and R 0 ( i 0 , j 0 , k 0 ) to specify an “inertial” frame 1 . Given a specific reference frame R m and a geometrical point P , this one is described p that represents the oriented segment − → in R m by the (geometrical) vector v m OP : v m p = v m 1 i m m + v m 2 j m m + v m 3 k m (2.10) m This notation puts in evidence the reference frame m that is used to represent P . The index m is omitted whenever there are no ambiguities. Given two reference frames R 1 e R 2 , the same geometrical point P has two repre- sentations: [ ] T v 1 v 1 v 1 v 1 p = in R 1 (2.11) 1 2 3 [ ] T v 2 v 2 v 2 v 2 p = in R 2 (2.12) 1 2 3 In alternative, we can use one of the following symbols to indicate the representation of v or − − → UV in R m : v 1 [ − ] − → UV [ v ] R m [ ⃗ v ] R m v 2 (2.13) R m v 3 R m 2.3 Vector types We represents vectors with a graphical icon: the most used icon is an arrow , as in Figure 2.2. Unfortunately this icon is sometimes misleading, as we will see, consid- ering that there are two types of vectors with different properties polar vectors 1 We use the term inertial for pseudo-inertial reference frames, as those fixed in the environment.
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.