CASTLE In a Nutshell Cognitive Models Motor controls and Sensory - PowerPoint PPT Presentation
CASTLE : A Framework for Integrating Cognitive Models into Virtual Environments Dr. Art Pope, SET Corporation Dr. Pat Langley, Arizona State University Sponsored by U.S. Air Force Office of Scientific Research CASTLE In a Nutshell Cognitive
CASTLE : A Framework for Integrating Cognitive Models into Virtual Environments Dr. Art Pope, SET Corporation Dr. Pat Langley, Arizona State University Sponsored by U.S. Air Force Office of Scientific Research
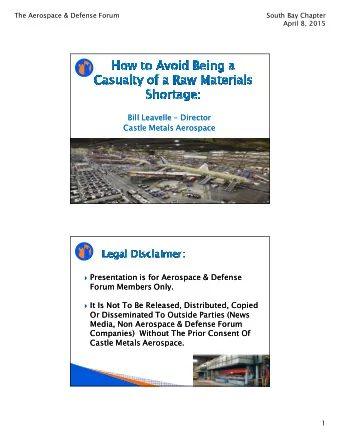
CASTLE In a Nutshell Cognitive Models Motor controls and Sensory inputs other actions Virtual Human Performance Other Virtual Models and Data Environment Environment World states and events Simulations World Model
Why a virtual environment?
Linking Cognitive Models to Military Simulations Military Training Simulations Computational Cognitive Models Simulate complex, real-time 3-D worlds Emulate human problem solving Standard interfaces available Recently have perceptual & motor modules Both human- and machine-controlled actors Allow “embodiment” in simulated worlds Need better machine-controlled ones Need suitable problem domains Problem : Limited integration Special-purpose interfaces Little re-use across research programs Lab-quality software Human-like limits not always imposed CASTLE Solves This Problem
Some CASTLE Design Goals Scalable – Multiple levels of complexity and fidelity – Multiple levels of sense / action abstraction • E.g., visual input as pixels, surfaces or objects • E.g., muscle control or “pick up x” Platform and language portable Efficient – Participation in real-time simulations * Accessible and extensible – Run-time discovery of senses and actions – Full as well as biologically-constrained access to state & events * depending on scene complexity, required fidelity, cognitive model, computing resources…
Support for Experimentation Import world models from diverse sources Provide tools for monitoring and control Log data for analysis and repeatability
What’s Hard Simulating physics – detecting collisions (contacts) among surfaces – integrating motion in the presence of constraints – these are computationally expensive and unstable With Consistency! Simulating optics – building 3-D models with rich structure and texture – efficiently rendering shadows, penumbras, reflections, irradiance Gaming applications are driving solutions – GPU-accelerated physics simulation – real-time ray tracing
CASTLE Design Allows user to control framework API through which cognitive model controls agent Allows software to control framework Interfaces to specific simulation environments Allows distribution across machines, languages and platforms Keeps cache of world state Records world states Renders visual input Simulates physics for and events for cognitive model cognitive model’s agent
CASTLE Implementation Portico HLA RTI Ice middleware Java3D scene graph JOODE physics engine Hibernate persistence engine PostgreSQL database Written in Java Based on open source components Data modeled and documented using UML
Attaching a Cognitive Model Attach Cognitive 1. Setup Connect to Select Actor to Query for Actor’s Model as Actor’s Simulation Control Characteristics Controller Cognitive Model 2. Execution Read Sensory Output Motor Cogitate Data Commands Update Poll Other Framework Simulation Controllers State Cognitive model can access API in any of several languages – C++, Java, .NET, Python, Ruby, … – LISP via foreign function interface Cognitive model can be on same or separate machine – on same LAN or across internet gateways and firewalls
Filtering — Imposing Human Limitations Framework imposes human-like limitations on sensory inputs, motor outputs E.g., visibility, accuracy, speed, repeatability Based on psychophysical and human performance data Applied through mechanism accessible to experimentalists
Example: Human Visual Performance Field of view Monocular: 160° (w) x 135° (h) – Binocular overlap: 120° (w) x 135° (h) – Resolution 60 cycles/deg. to 2.5 cycles/deg. – (depends on eccentricity, contrast) Dynamic range 10 2 : 1 in a single “exposure” – 10 5 : 1 in a single scene – 10 9 : 1 with 30 minutes adaptation – Temporal resolution Max. flicker frequency: 50-60 Hz – (depends on contrast, wavelength, extent) Min. temporal separation: 15-20 ms – Movement Tremor: 10-30 arc-seconds; up to 80 Hz – Drift: 1-5 arc-minutes – Microsaccades: 2-120 arc-minutes in – 10-20 ms Saccades: up to 1000°/s for 20-200 ms –
Example: Human Auditory Performance Frequency response: 16 - 20,000 Hz Sensitivity: 130 dB range – Min.: 10 -12 watts/m 2 – Max.: 10 watts/m 2 – Temporary Threshold Shift (TTS): • Reduced sensitivity after exposure to >70 dB(A) Localization accuracy – Front: 2° horizontal, 3.5° vertical – Peripheral: 20° Masking effects – Frequency or simultaneous masking: inability to distinguish simultaneous sounds – Temporal masking: offset attenuation lasting 50 ms
Filtering — Summary No. Name Description H04 Front sound localization A human can localize sounds in front to within 2 deg hor., 3.5 deg ver. Algorithms H05 Peripheral sound localization A human can localize sounds to the side to within 20 deg H06 Sound masking Loud sounds mask a human's perception (detection) of quiet ones Java H07 Sound dynamic range A human perceives sounds over a dynamic range of 130 dB H08 Distant sounds A human is given perceptual cues as to the distance of sound sources H09 Sound characterization A human can distinguish various categories of sounds, such as explosions, vehicles, and contact noises Parameters S04 Field of view A human eye has a field of view of 160x135 deg Models & Data S05 Foveal resolution Foveal resolution of a human eye is 60 cycles / deg XML S06 Parafoveal resolution Parafoveal resolution of a human eye is 15 cycles / deg S07 Peripheral resolution Peripheral resolution of a human eye is 2.5 cycles / deg Human Performance “Spec Sheet” CASTLE Framework
Configurable Senses and Motors Vision sense – any number of “eyes” – each with specified field-of-view, resolution, saccade muscles No cheating: All – delivers images and/or sets of visible objects cognitive model Kinesthetic sense inputs and outputs – delivers approximate position and force of each joint are normalized, unit- Tactile sense – entire visible surface is touch sensitive less quantities with – 3-D “skin” surface mapped to 2-D touch position manifold stochastic noise. – resolution and sensitivity interpolated from discrete nodes – delivers approximate position and pressure, with stochastic error Time sense – delivers approximate elapsed time, with stochastic error Motors / muscles – control hinged joints and wheels – each has maximum velocity, acceleration, torque – cognitive model can command position, velocity, or torque – commanded values are stochastically perturbed
Example: Simple Humanoid Robot neck rotation monocular vision shoulder & elbow rotation temporal sense waist rotation tactile sense on all surfaces stable wheeled base proprioception in all joints pivot steering
Example: Outdoor Urban Environment
Current Status of CASTLE Framework Senses implemented: Vision: both pixel and visible surface representations – Tactile: contact location and force – Kinesthetic: joint angles and forces – Time – Actions implemented: Position, velocity and force control of muscles / motors on hinged and rotary joints – Simulation interfaces implemented: Interface to simulation environments via High-Level Architecture (HLA) – Testing with Delta3D simulation environment – Cognitive architecture interfaces implemented: Interface to Icarus via Common Lisp foreign function interface – Virtual environments: Indoor world of rooms, furniture and objects – Outdoor world of roads, buildings and vehicles – Free, open source for educational and research use
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.