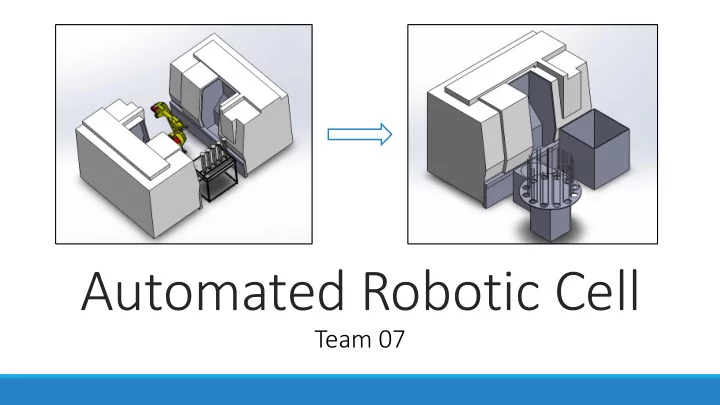
Automated Robotic Cell Team 07
The Team Alex Keizer Josh Tempelman Michael Bissetta Nathan Casey (ME) (ME) (ECE) (ECE) Introduction Components Calculations Questions 2/21
Project Change 3+ years of production anticipated on the part created by the cell November 16 the OEM notified PQS that the part will be OEM discontinued in Q1 of 2018 PQS has assigned a new project to the team to replace this one SUPPLIER PQS Old Part New Part Introduction Components Calculations Questions 3/21
Old Project Components 2 Haas SL-20 Lathes Fanuc M-16iB/10L End of Arm Tooling Part Dispensing System Part Measurement System Cell Caging and Safety Equipment Introduction Components Calculations Questions 4/21
New System Components Haas SL-20 Lathes Fanuc M-6iB RJ3iB End of Arm Tooling Part Loading Table Cell Caging and Safety Equipment Robot Mounting Base Introduction Components Calculations Questions 5/21
Old Robotic Arm Fanuc M-16iB/10L 6-axis 10 kg (22 lb) capacity 1885 mm (6.18 ft) reach Quote received from Antenen Robotics Introduction Components Calculations Questions 6/21
New Robotic Arm Fanuc M-6iB RJ3iB 6-axis 6 kg (13 lb) capacity 1373 mm (4.50 ft) reach Quote received from Antenen Robotics Introduction Components Calculations Questions 7/21
Old End of Arm Tooling Rapid Part Change Capability Robot Arm Mounted Modular Introduction Components Calculations Questions 8/21
New End of Arm Tooling Rapid Part Change Capability Robot Arm Mounted Suction Cups Are Industry Standard Design Norm: Trust Introduction Components Calculations Questions 9/21
Old Part Dispensing System Designed and built by the team 330 part capacity (2-3/4 hour runtime) 62” x 24 - 1/2” x 63 - 1/2” Pneumatic cylinder controlled Gravity fed Single-point pickup Introduction Components Calculations Questions 10/21
New Part Dispensing System Designed and built by the team 300 part capacity (4 hour runtime) 44” x 44” x 53” Powered from servo to Gearbox, Gear, Ring Bearing Pneumatic Cylinder Fed Single-point pickup Design Norms: Caring and Trust Introduction Components Calculations Questions 11/21
Old Measurement System Opting to use Keyence probe (GT2-H32) 6 Hz response Mentor recommended a touch-based probe over laser system www.cognex.com www.keyence.com Introduction Components Calculations Questions 12/21
New Measurement System None Required!!!! Introduction Components Calculations Questions 13/21
Old System Controller PLC Controlled Measurement System Part Loader Lathe 2 Fanuc Arm PLC Lathe 1 ab.rockwellautomation.com Introduction Components Calculations Questions 14/21
New System Controller PLC Controlled Part Loader Lathe PLC Fanuc Arm ab.rockwellautomation.com Introduction Components Calculations Questions 15/21
Old Cell Caging Velox Post Velox Panel Velox Door CNC CNC Fanuc Robot Introduction Components Calculations Questions 16/21
New Cell Caging 8020 Construction Gate with Safety Relay Light Curtain Door with Safety Relay Introduction Components Calculations Questions 17/21
Old Part Dispensing Calculations Angle of Repose Cylinder Force 𝐺 = 𝑄𝐵 𝐺 = 𝜈𝑂 𝛽 = tan −1 (𝜈) 50 45 Slope of Ramp (Degrees) 40 30 Deg. Cut 45 Deg. Cut 35 60 Deg Cut Repose Requirement 30 Actual Angle 25 20 30 35 40 45 50 55 60 Angle of Repose Introduction Components Calculations Questions 18/21
New Part Dispensing Calculations Inertia of Table and Parts Introduction Components Calculations Questions 19/21
New Part Dispensing Calculations Position, Velocity, Acceleration, Jerk Introduction Components Calculations Questions 20/21
Questions? Introduction Components Calculations Questions 21/21
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries








![Data Corruption in even/odd bit-line Nand architecture Cell to Cell Coupling [source]](https://c.sambuz.com/479431/data-corruption-in-even-odd-bit-line-nand-architecture-s.webp)